模糊图像处理在活塞环检测中的应用
2014-09-05贾正峰于忠海张晓锋
贾正峰,于忠海,张晓锋 ,陈 田
(1.上海理工大学 机械工程学院,上海 200093)(2.上海电机学院 机械学院,上海 200245)(3.上海交通大学 机械与动力工程学院,上海 200240)
模糊图像处理在活塞环检测中的应用
贾正峰1,2,于忠海1,2,张晓锋2,3,陈 田1,2
(1.上海理工大学 机械工程学院,上海 200093)(2.上海电机学院 机械学院,上海 200245)(3.上海交通大学 机械与动力工程学院,上海 200240)
为了解决因在活塞环缺陷检测的过程中,由于相机与活塞环之间存在相对运动,使图像产生运动模糊,对后面的缺陷特征提取、目标识别和图像分析产生的不良影响,以运动模糊图像的点扩展函数估计为中心,推导和计算出图像模糊的模糊角度以及模糊长度,然后应用维纳滤波的方法,得到复原后的质量得到改善的图像。同时通过实验的方法,测试了图像复原的结果,得到经过预处理后质量较高的图片。
活塞环;缺陷检测;运动模糊;图像复原;点扩展函数
活塞环缺陷检测是一个数量大并且反复的过程,因而要求对每一个活塞环的检测要在短时间内完成,使得在拍摄过程中相机与活塞环之间存在着比较大的相对运动,这也是造成图像采集过程中图像模糊的最重要原因。尽管可以通过调节曝光时间来匹配相应的转速,使得图像模糊现象得到一定的改善,但曝光时间不能无限制的调节,否则会造成相机的曝光量不足,在成像的过程中丢失必要的轮廓以及缺陷的信息,以致在图像分析处理过程中出现误检或是漏检。因此,在曝光时间调节适当的情况下,对采集到的图像数据先进行图像复原,恢复图像的真实信息,再对复原图像进行特征提取、数据分析,这样能够最大程度地保留活塞环表面的特征信息,使得处理结果更符合要求。
物体在运动过程中存在惯性,在相机拍照的短暂曝光时间里,可以认为运动方向是近似不变的,通常作为直线运动处理。运动模糊图像中的模糊长度就是点扩展函数矩阵的尺度,运动模糊点扩展函数是建立退化模型的重要一环。通过对图像的旋转,旋转角度即为模糊角度,将运动模糊方向旋转到水平轴,这样就将二维问题转化成为一维问题。然后将旋转后的模糊图像在水平轴上进行一阶微分,再求出各行的自相关,并将微分自相关图像的各列求和,得到一条鉴别曲线,曲线上会出现一对共轭的双峰,该双峰为负值,对称分布在零频尖峰两侧,两相关峰之间的距离就是运动模糊点扩展函数尺度的两倍[1]。通过这样的方法,可以估算出点扩展函数,从而可以直接通过维纳滤波等方法对图像进行复原。
因此如何做好活塞环缺陷图片的预处理,提高图片质量,为后续的活塞环缺陷特征提取、目标识别和图像分析打好基础,是当前活塞环缺陷检测系统急需解决的问题。
1 点扩展函数计算过程
运动模糊点扩展函数中非常重要的参数是模糊角度和模糊长度,下面分别对这两个参数进行计算和估计。
1.1模糊角度
模糊角度的计算目前比较通用也比较成熟的方法是利用Radon变换。Radon变换利用的是在某指定方向上的投影的图像变换方法。该方法是对运动模糊图像进行二次傅里叶变换,将变换后的结果图像进行二值化处理,并在0°~179°内进行Radon变换以获取每个对应角度上的极大变换值。Radon变换的极大变换值所对应的角度就是所求的模糊角度[2]。具体步骤叙述如下:首先,将相机拍摄的照片导入,并对导入的图像进行傅里叶变换,再将变换后的图像的零频移动到图像的中间,对傅里叶变换后的模值变化范围压缩,这使得图像的条纹明显清晰且条纹的间距不变;然后,重复进行傅里叶变换、零频移动、同态变换的过程,并对此时的图像进行二值化处理;最后,进行Radon变换,计算Radon变换极大值所对应的角度。
1.2模糊长度
运动模糊图像的模糊长度就是模糊参数中点扩展函数的对角线长度。按照上面的方法计算出模糊方向后,将模糊图像按照求得的模糊角度旋转到水平轴方向,那么求解模糊长度将转化成求解一维点扩展函数的问题。具体步骤如下:首先利用所求模糊角度将运动模糊图像旋转,将运动方向旋转至水平轴方向;然后再进行一阶微分,求得各行的自相关;接着对微分自相关图像各列实施求和,可以得到一条鉴别曲线,曲线上会出现一对共轭的相关峰,这对相关峰数值为负,对称分布在尖峰两侧;最后,估计这两相关峰间的距离,估计所得出的距离就等于运动模糊长度的两倍[3-5]。
2 活塞环缺陷实例计算
下面以活塞环端面压伤为例。图1所示为静止状态下拍摄的活塞环端面压伤图像,图中白色类椭圆形状就是缺陷所在位置,周围用黑色记号笔圈出了缺陷所在位置。图2所示为试验平台运动状态下拍摄到的同一缺陷位置处的图像。两图比较之下,能够看出在图2中的活塞环有明显的拖影现象,此时用Sobel算子进行边缘提取,边缘提取图像如图3所示,通过图片可以看出活塞环的轮廓,在端面压伤缺陷位置有明显的拉长现象,同时还伴有某些活塞环表面杂质噪声被拉长成类似直线的线条。这些都是由于相对运动产生图像模糊造成的。
图1 静止状态 图2 运动状态
图3 运动模糊图像边缘提取图
利用上述方法,分别计算模糊角度和模糊长度。在估计出点扩展函数PSF后,利用维纳滤波对模糊图像进行复原。用同样的Sobel算子对复原后的图像进行边缘提取,边缘提取图像如图4所示。分析比较图3和图4可以看出,缺陷的提取更加接近静止时拍摄的图像,同时去掉了被拉长的直线,整体复原效果较好。图5、图6、图7分别为静止、运动、图像复原后3个状态下边缘提取缺陷位置的放大图像,可以看出模糊图像中缺陷被拉长,图像复原后缺陷更接近于静止状态。
图4 像复原后边缘提取

图5 静止状态下边缘提取
图6 运动状态下边缘提取
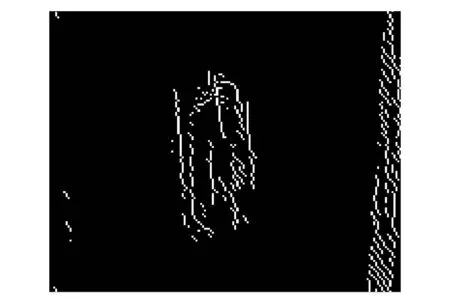
图7 图像复原下边缘提取
3 实验中出现的问题讨论
在整个实验过程中,图像产生运动模糊的因素主要是曝光时间和试验台速度。除此之外,试验台的震动、光照、传输等也会对图像造成一定的影响。这些很难估计的因素也使得图像复原只能是得到近似结果。
在图像复原中另外一个参数NSR(信噪比),也是要考虑的重要因素。在实验中随着曝光时间的减少,图像中的椒盐噪声、高斯噪声越加明显。这也从另一方面说明了不能无限制地调节曝光时间。
实验室与工厂的工作环境不同,所以在实际操作中点扩展函数PSF还要根据当时的情况,估计合适的模糊角度和模糊长度。在整个缺陷检测系统中这只是其中的一段程序,但程序中的参数要由实验得出。
4 结束语
由于条件限制,文章所涉及的检测以及图像处理均在实验室环境中完成。图像复原技术尤其是模糊图像的复原虽然只要考虑两个参数,但实际过程中噪声的影响以及运动状态都是比较复杂的,还需要做大量的工作来提高图像复原的准确性。在实际生产检测过程中,对于活塞环检测还要完成相应的参数设定。因而后续将尽可能与企业联合,进一步完善模糊图像复原的相关理论和检测系统。
[1] 陈前荣,陆启生,成礼智.运动模糊图像点扩散函数尺度鉴别[J].计算机工程与应用,2004,40(23):1-5.
[2] M Cannon.Blind deconvolutiong of spatially invariant image blurs with phase[J].IEEE Trans Acoust Speech Signal Process,1976,24(1):58-63.
[3] 陈建功.运动模糊图像复原算法研究[D].南昌:南昌航空大学,2012.
[4] 张明谦.运动模糊图像的运动参数估计及复原研究[D].成都:电子科技大学,2009.
[5] 闫永存.运动模糊图像复原技术研究[D].成都:西华大学,2012.
ApplicationofBlurImageProcessingintheDetectionofPistonRing
JIA Zhengfeng1, YU Zhonghai1,2, ZHANG Xiaofeng2,3, CHEN Tian1,2
(1.Shanghai University of Science and Technology, Shanghai, 200093, China)(2.Shanghai DianJi University, Shanghai, 200245, China)(3.Shanghai Jiao Tong University, Shanghai, 200240, China)
There is relative motion between the camera and the piston ring in the process of defect detection for piston ring. This makes the image produce motion blur inevitably, affects the defect feature extraction and target recognition and image analysis. Taking the estimation of point spread function of the motion blurred images, it derives and calculates the blur angle and blur length of the blurred images, applies the method of Wiener filtering to improve the image quality after the restoration. Based on the experimental methods, it tests the effect of image restoration, obtains the pretreatment of high quality.
Piston Ring; Defect Detection; Motion Blur; Image Restoration; Point Spread Function
10.3969/j.issn.2095-509X.2014.08.013
2014-07-15
贾正峰(1989—),男,内蒙古包头人,上海理工大学硕士研究生,主要研究方向为测试控制技术。
TP391.4
A
2095-509X(2014)08-0054-03
