基于AMESim的抓斗采矿船液粘调速系统仿真
2014-09-05刘方超张玉莲
刘方超,张玉莲
(浙江海洋学院 船舶与海洋工程学院,浙江 舟山 316022)
基于AMESim的抓斗采矿船液粘调速系统仿真
刘方超,张玉莲
(浙江海洋学院 船舶与海洋工程学院,浙江 舟山 316022)
阐述了液粘调速离合器的原理及其在抓斗采矿船动力传动系统上的应用,利用AMESim动力仿真软件对抓斗采矿船的动力传动系统进行建模,调节元件模型参数,优化模型。通过仿真抓斗采矿船的一个典型工作循环,得到了系统的动态性能曲线。通过分析仿真结果,验证了液粘调速离合器的作用效果及模型的有效性。
抓斗采矿船;液粘调速离合器 ;AMESim;仿真分析
抓斗式采矿船由于采矿效率高、环境适应力强等特点,已成为当今浅海采矿船的主要形式。然而随着抓斗斗容的不断增大,对设备的技术要求也越来越高,稳定而灵活地控制抓斗吊放,对采矿效率及安全性有着重要的意义。但是对于载荷如此巨大且工矿复杂、换向调速频繁的设备,一般的调速离合设备很难满足要求。通过比较已有的各种传动装置发现,近几年发展起来的一种新型调速装置——液粘调速离合器具有明显的技术优势。利用这种离合器与液力变矩器结合构成的传动系统,能够很好地适应大型抓斗式采矿船舶。本文利用AMESim系统建模仿真软件对斗容30m3抓斗采矿船的液粘调速动力传动系统进行建模,并就抓斗的一个典型工作循环进行动态仿真分析。
1 液粘调速离合器
液粘调速离合器是基于流体力学中牛顿内摩擦定律发展起来的一种新型流体传动技术,基本原理为(如图1所示):相对运动两平板间单位面积上的油膜剪切力F与液体的动力粘度μ、平板间的相对速度v成正比,与平板间的间隙即油膜厚度h成反比[1],其计算表达式为:
(1)
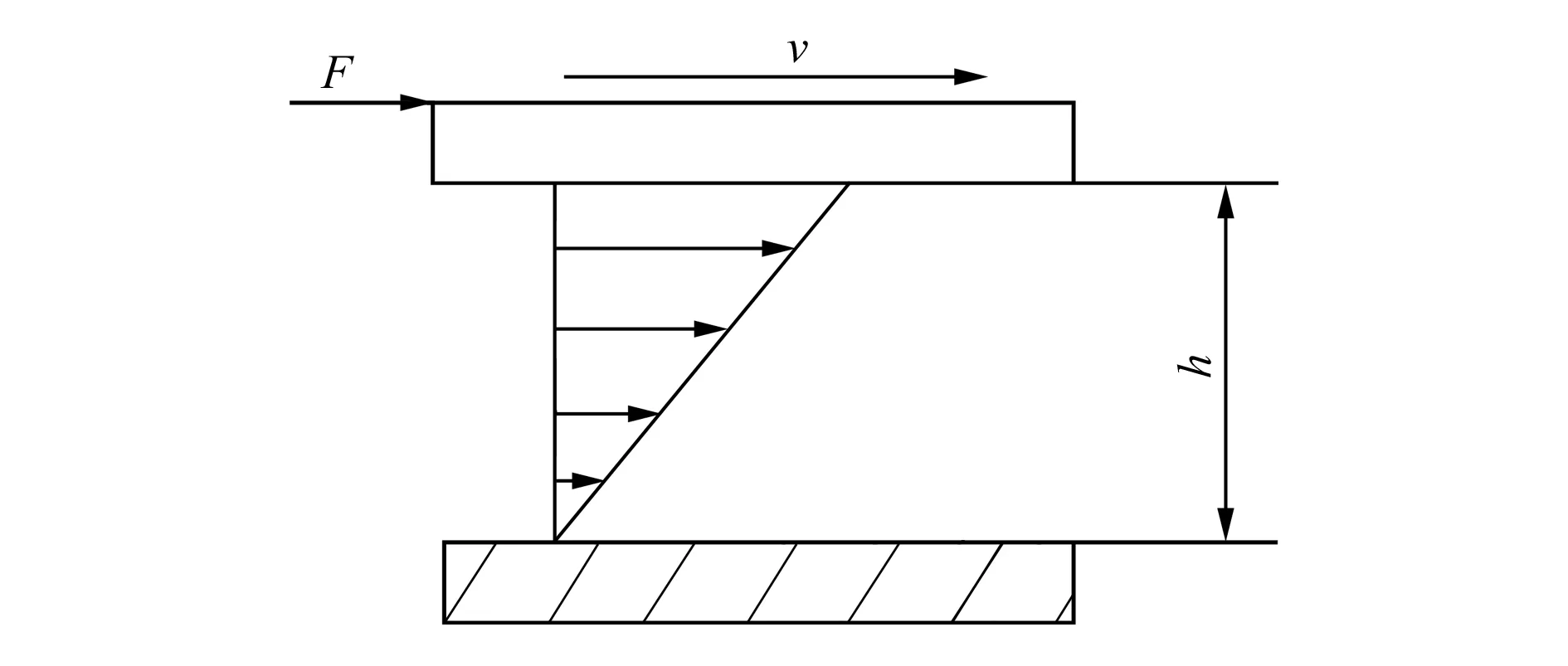
图1 牛顿内摩擦定律原理图
液粘调速离合器的基本结构如图2所示,在输入轴与输出轴上各固定有数个摩擦圆盘,两组圆盘同轴交错叠放。动力由输入轴上的花键传至主动摩擦片,再通过油膜剪切作用将动力传至被动摩擦片, 然后经由花键传至输出轴。通过调节作用在摩擦片上的液压缸的油压可以改变摩擦片的间距。根据流体的牛顿内摩擦定律,在传递的扭矩不变的情况下,通过连续地调节油缸压力,能够进行输出转速的无级调节。冷却及润滑系统用于向摩擦片之间提供具有一定压力的工作油,以保证在摩擦片之间形成稳定的油膜, 并带走由于滑摩产生的热量, 保证调速器持续稳定地工作[2]。液粘调速离合器具有以下特点[3]:
a.可实现输出转速、转矩的无级调速。
b.能实现软启动,遇到过载冲击时自动限矩,从而保护传动系统不受损。
c.易于实现闭环控制,调速灵敏、稳定、精度高。
d.摩擦片之间产生的滑摩热被不断循环的工作液体及时带走,使设备能够长时间运转。
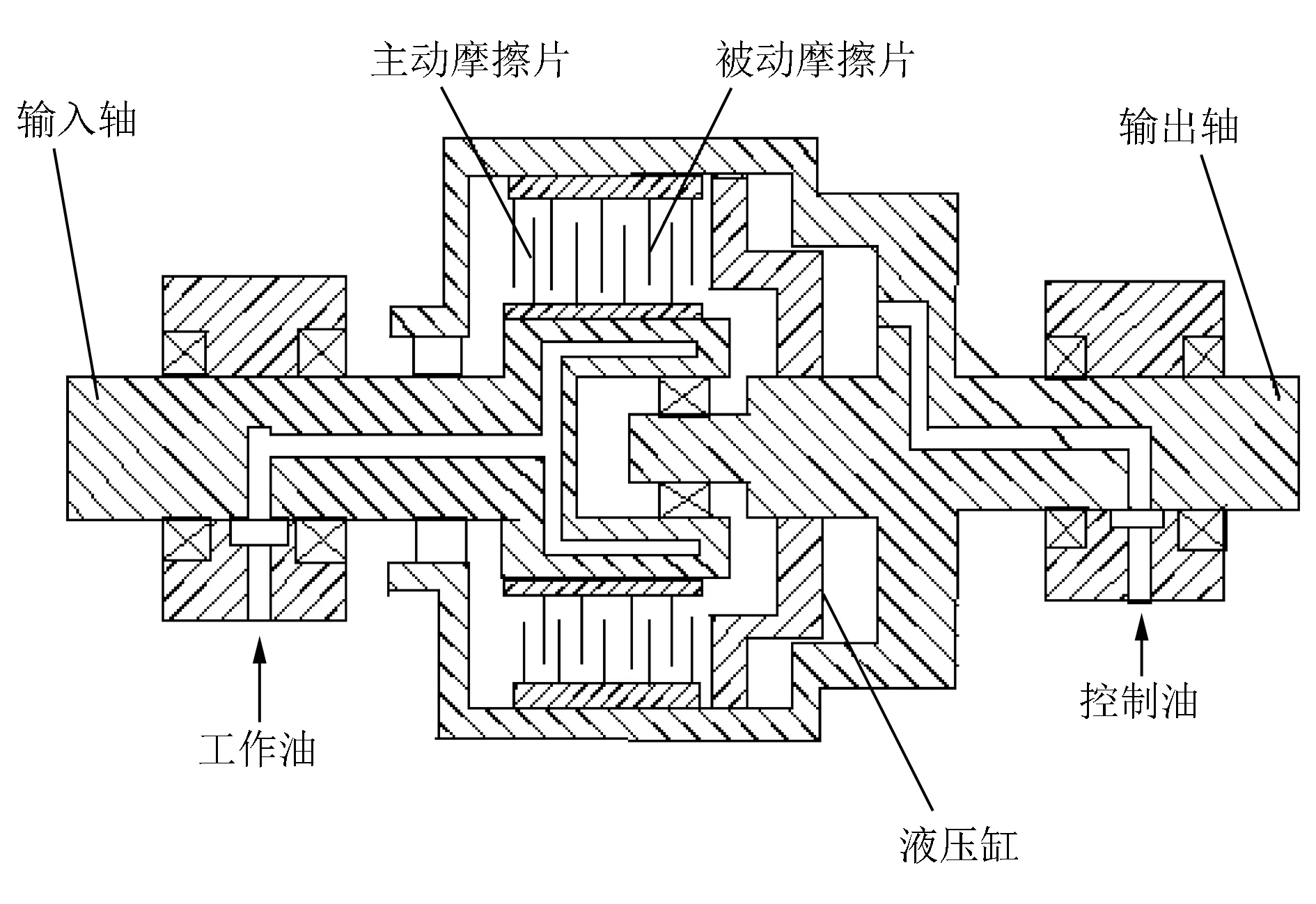
图2 液粘调速离合器示意图
e.当摩擦片完全接触时,能够实现无转速差的同步转动,即相当于一根刚性轴,无功率损失,效率达到100%。
本抓斗船的动力传动系统的另一个关键部件是液力变矩器,其因具有自适应性、反转制动性、隔震防过载、带载启动、变速变矩等特点而被广泛地应用于各种工程机械、矿山机械、起重机械的动力传动装置中。在传动系统中其良好的动力性能是其他装置无法取代的,所以该抓斗船的动力传动系统仍然采用液力变矩器作为主要的传动部件以改善系统的动力性能。液力变矩器虽然能够根据外部阻力的变化,自动改变涡轮输出轴上的扭矩和转速,实现恒功率的牵引,然而这一调节过程是自动的。换句话说是不受人为控制的,这对抓斗船来说是绝对不允许的,所以需要一个有效的控制策略对液力变矩器的输出进行人为控制。为此在液力变矩器与柴油机之间串联一液粘调速离合器,这样在柴油机额定工况、不改变液力变矩器外特性的情况下,通过调节液粘调速离合器的摩擦片间距来改变液力变矩器的泵轮输入转速,从而可在不改变柴油机额定转速的情况下,得到无级调节的输出转矩、转速。这样能在高效情况下满足抓斗采矿船的工况需要[4]。
2 系统组成及工作原理
抓斗采矿船动力提升系统主要由柴油机、液粘调速离合器、液力变矩器、齿轮箱、卷扬机、抓斗等组成。抓斗的上升下降是通过卷扬机收放缆绳来实现的,其起吊的速度由卷筒转速决定。因此,对起吊速度的控制其实就是对液力变矩器涡轮转速的控制。
整个系统的工作原理如图3所示,发动机、液粘调速离合器、液力变矩器、齿轮箱、卷扬机依次串联。检测装置用于检测绞车输出转速,信号比较器将检测到的信号与驾驶室发出的指令信号相比较,控制调节器根据信号差值对液粘调速离合器的摩擦片间的油膜厚度进行调节,使输出转速与指令信号代表的转速一致。由于液粘调速离合器反应迅速,精确性高,所以目前大多数抓斗式船舶都采用这种传动形式。
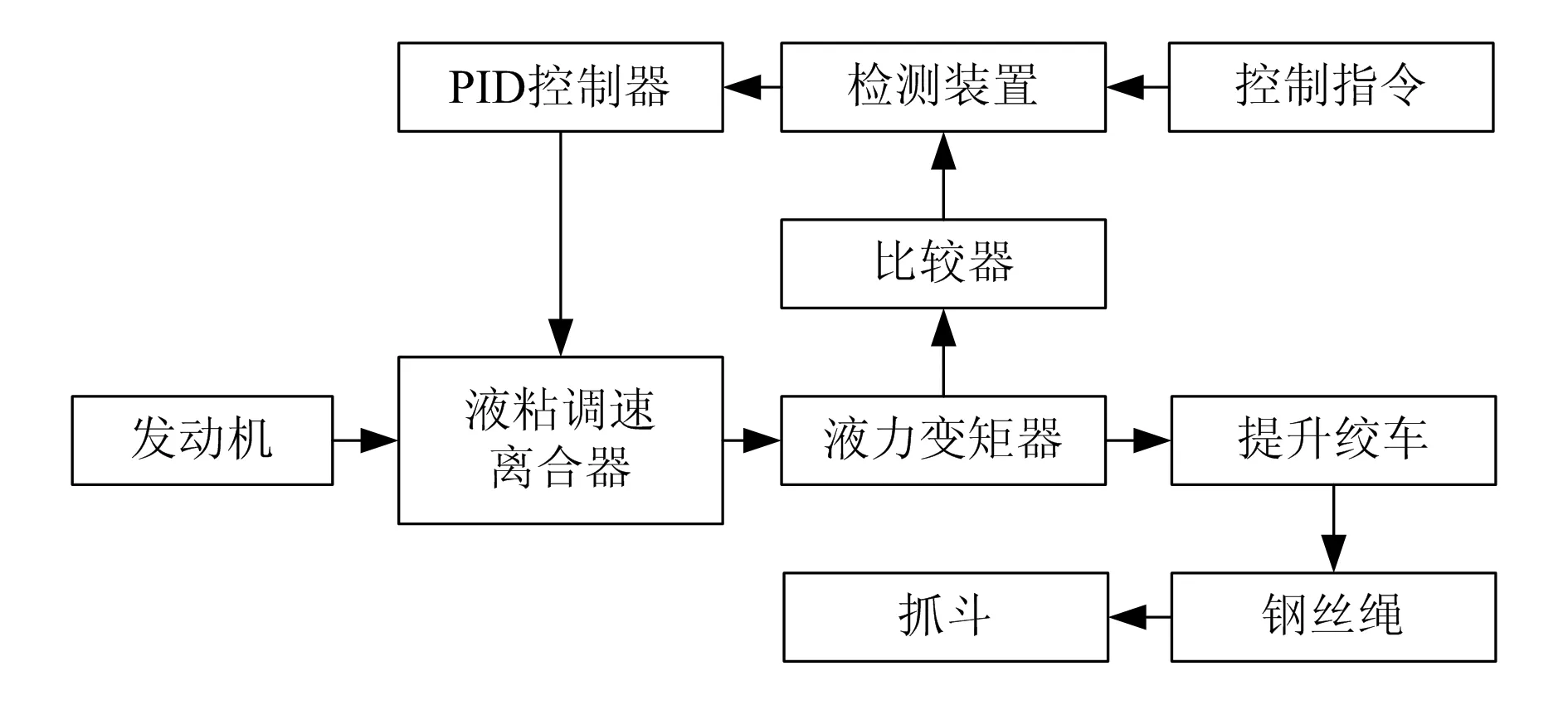
图3 采矿船的动力装置组成
3 系统的AMESim建模与仿真
本文的建模对象为舟山海川船舶有限公司的一艘斗容30m3的抓斗采矿船的动力传动系统,该船的工况技术指标见表1。
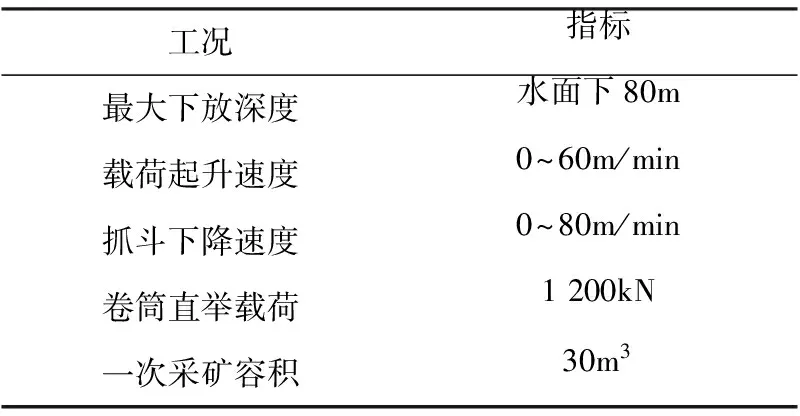
表1 工况技术指标
3.1模型的建立
AMESim 是法国IMAGINE 公司开发设计的多学科领域复杂系统建模仿真软件,该仿真软件采用基于物理模型的图形化建模方式,提供了丰富的可以直接使用的元件应用库,从而避免了繁琐的数学建模,用户只需专注于物理系统本身就能构建出满意的模型,软件还提供了强大的后处理功能,便于用户进行分析、优化[5]。利用该平台中的传动及控制信号元件库,能够快速地建立抓斗采矿船的动力传动系统,通过调节模型参数可方便地模拟各种工况,并得到系统各部件的详细仿真结果。
依据抓斗采矿船系统部件的组成及参数,运用AMESim 软件建立了系统中各模块模型,如图4所示(实线代表动力传递,虚线代表控制信号)。
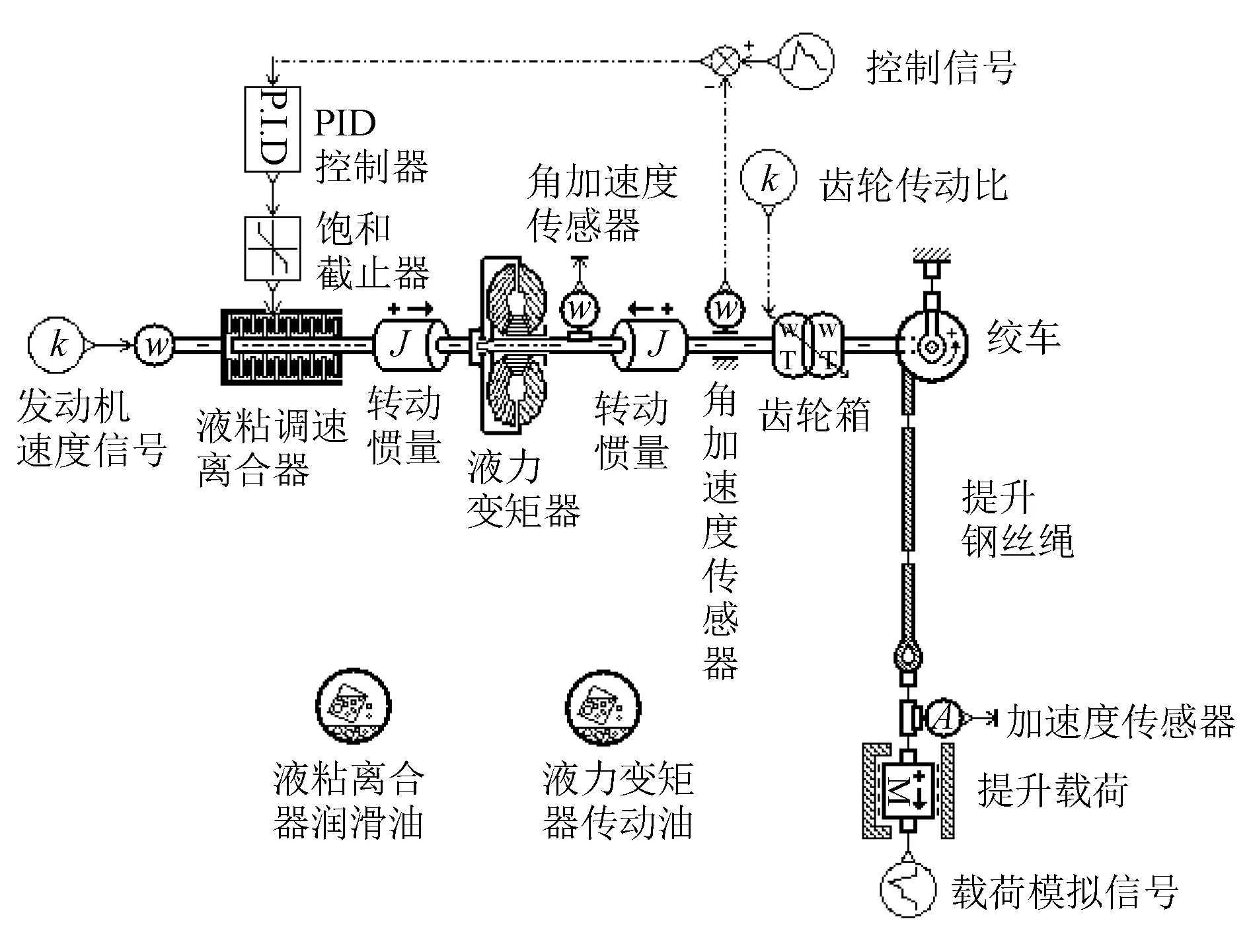
图4 AMESim建立的系统模型
液粘调速离合器采用AMESim传动系统库的标准摩擦离合器模型TRDC002A代替,调整该模型的内部参数,使其在滑摩状态时干摩擦传递的力矩为零,摩擦片只有油膜传递的剪切力矩存在,再通过合理地设定油液的密度及粘度,就能近似地模拟液粘调速离合器的调速特性。
为了简化仿真,整个仿真过程中用一恒速信号源代表柴油机,这即简化了仿真模型,又符合实际工作时希望柴油机工作在恒速的理想情况。因为本次仿真的目的为:应用液粘调速离合器调节液力变矩器以适应抓斗采矿船的典型工况循环,所以液粘调速离合器的控制部分直接用信号库的PID模块代替,仿真时通过调节PID的参数来达到模拟控制器的目的,这样既简化了模型又不会对结果的可靠性有太大的影响[6]。用两端口的限位质量块模拟抓斗,通过在其一端口输入一阶跃信号来模拟当抓斗矿砂突然卸载时所带来的冲击,限位参数用于模拟海底对抓斗下放的深度限制。速度和转矩变换模块用来模拟齿轮箱。
3.2典型工况下的仿真分析
抓斗在一个循环周期内分4个工作阶段,即满斗提升阶段、满斗动力悬停阶段、空斗动力悬停阶段、空斗下放阶段[7]。其中在动力悬停阶段时,抓斗的提升高度没有变化,抓斗只有水平移动,此时抓斗张开将矿砂倒入运砂船仓里,为了模拟抓斗质量的这一突然变化,在抓斗的动力悬停阶段给代表抓斗的质量块输入一幅值为300kN的阶跃信号。根据实际系统技术指标,设定发动机的输入为恒转速2 100r/min,代表抓斗的质量块为120 000kg。假设在某次工作循环,控制器的输入转速曲线如图5所示,其中a-b段为满斗提升阶段,b-c段为动力悬停阶段(包括满斗悬停和空斗悬停),c-d段为空斗下放阶段。
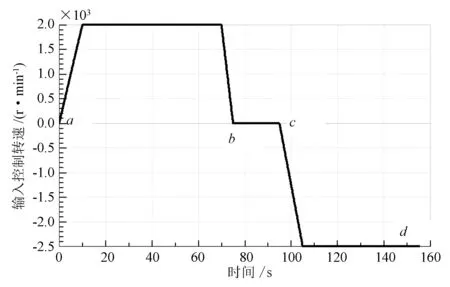
图5 控制器输入转速曲线
运行仿真软件得到抓斗的输入控制转速及液力变矩器的输出转速曲线如图6所示。可以看出液力变矩器的输出速度的变化趋势近似跟随控制器输入速度的变化,只是速度的变化会有些滞后,并且在起吊、卸斗和抓斗插入泥土时会出现一些波动,这也符合系统的实际物理特点。
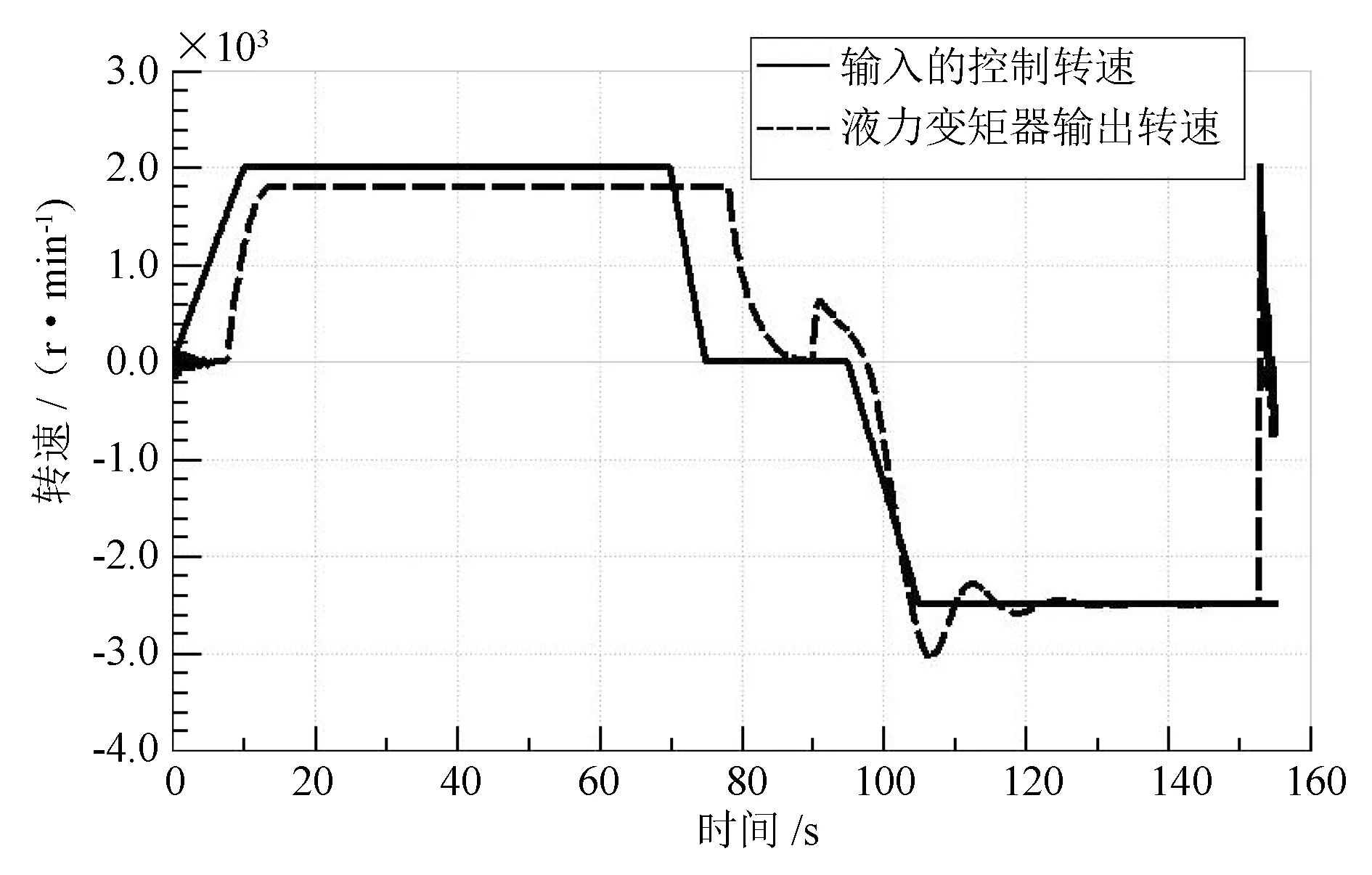
图6 液力变矩器的输出转速曲线
图7为液粘调速离合器的输出速度随油膜厚度的变化关系曲线。液粘调速离合器的输入轴转速一定,输出轴转速随油膜厚度的变化而变化,由图可以看出油膜厚度变化对输出轴速度控制灵敏,调速范围宽,能满足工况要求。
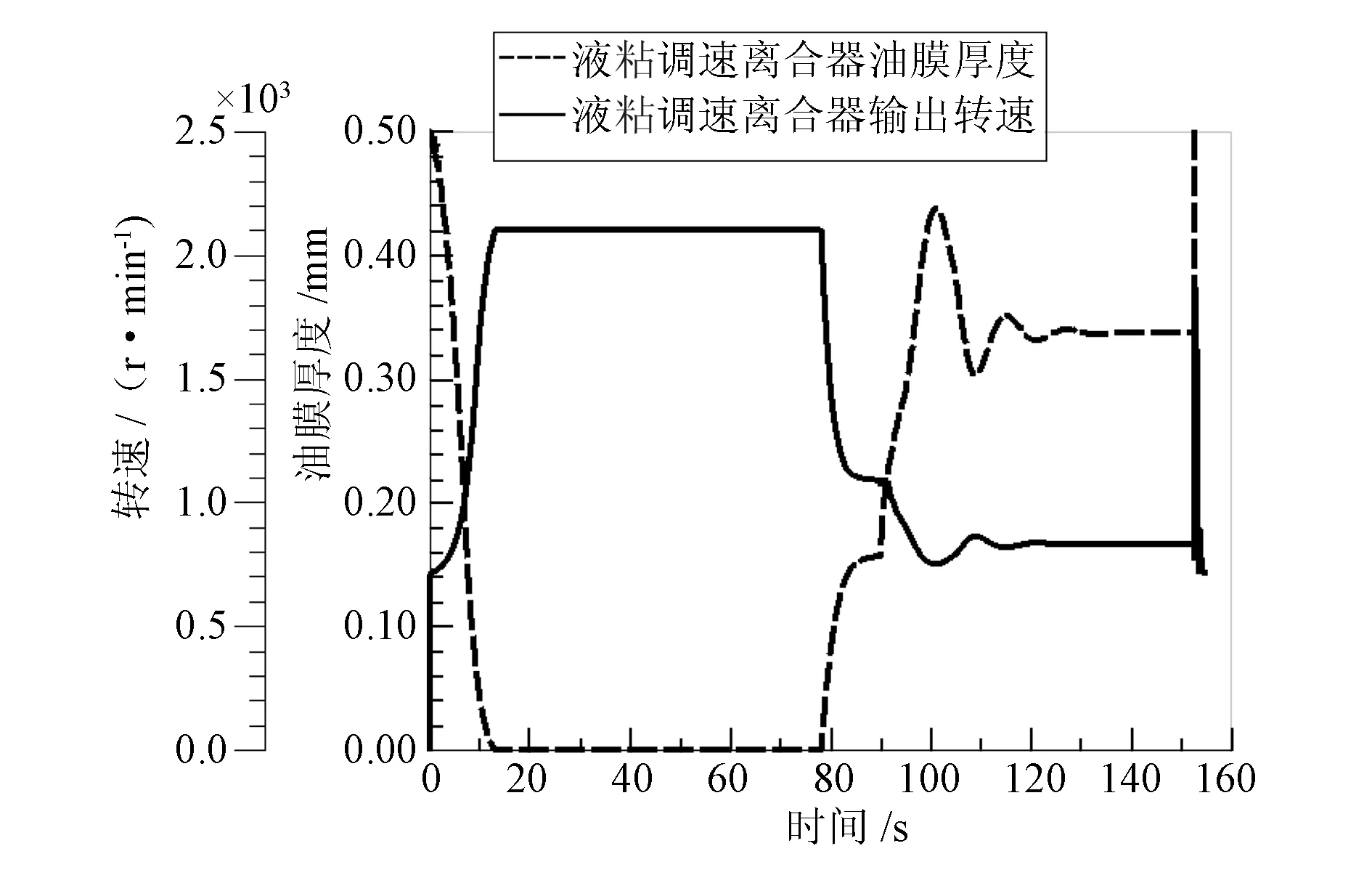
图7 液粘离合器的输出速度和油膜厚度曲线
图8为抓斗的提升高度和抓斗运动速度的变化曲线。可看到抓斗提升时的稳定速度近似为60m/s,下降时的稳定速度为80m/s,速度平稳,符合抓斗船的技术指标要求。还可看到,在动力悬停阶段,由于矿砂的突然卸载而造成的冲击,使抓斗速度发生了微小的波动,波动使抓斗向上运动0.5m左右,说明该系统具有明显抗冲击的能力。
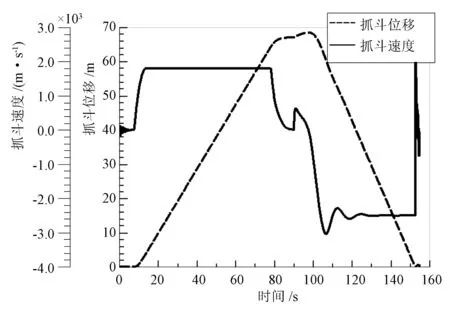
图8 抓斗的位移和速度变化曲线
4 结束语
本文运用AMESim对采用了液粘调速离合器的抓斗采矿船的动力传动系统进行建模与仿真,得到了系统的一些动态性能曲线,反映了液粘调速离合器对系统的良好调速效果,同时也验证了模型的合理性。然而为了简化仿真,对模型做了一些简化,所以仿真数据与实际情况还是存在着一些偏差,有待于将来进一步研究完善。
[1] 魏宸官,赵家象.液体粘性传动技术[M].北京:国防工业出版社,1996.
[2] 郭立平,姜守霞.新型传动装置液粘调速离合器及应用[J].节能,1998(10):41-43.
[3] 陈宁.液体粘性传动(HVD)技术的研究[D].杭州:浙江大学,2003.
[4] 杨乃乔.液粘调速装置各种结构和应用[J].起重运输机械,1995(1):17-23.
[5] 付永领,齐海涛.AMESim系统建模和仿真实例教程[M].北京:北京航空航天大学出版社,2011.
[6] 姚寿文,崔红伟,闫清东,等.基于AMESim的液粘调速离合器PID控制特性研究[J].机床与液压,2012,40(24):69-75.
[7] 饶鸿才,陶曾鲁.4m3抓斗挖泥机用可调式液力变矩器[J].起重运输机械,1993(4): 11-16.
Hydro-viscousDriveSimulationofGrabMiningShipBasedonAMESim
LIU Fangchao, ZHANG Yulian
(Zhejiang Ocean University, Zhejiang Zhoushan, 316022, China)
It presents the principle and application of hydro-viscous variable speed clutch of grab mining ship, establishes the simulation model for hydro-viscous system with AMESim and optimizes this model based on the component model parameters. It obtains some key dynamic characteristic curves from the simulation in a typical work cycle of grab mining ship. The simulation result proves that the simulation model is reasonable.
Grab Mining Ship; Hydro-viscous Clutch; AMESim; Simulation and Analysis
10.3969/j.issn.2095-509X.2014.08.004
2013-12-02
浙江省重大科技专项社会发展项目(2013C03031)
刘方超(1985—),男,辽宁朝阳人,浙江海洋学院硕士研究生,主要研究方向为船舶动力工程及配套设备。
TP391.9
A
2095-509X(2014)08-0014-04
