主轴回转运动精度的计算机视觉测量系统
2014-09-05关芳芳程筱胜
关芳芳,程筱胜
(1.南京航空航天大学 机电学院,江苏 南京 210016)(2.南京工程学院 工业中心,江苏 南京 211167)
主轴回转运动精度的计算机视觉测量系统
关芳芳1,2,程筱胜1
(1.南京航空航天大学 机电学院,江苏 南京 210016)(2.南京工程学院 工业中心,江苏 南京 211167)
基于计算机视觉测量技术,建立了机床主轴回转运动精度测量系统。系统主要由CCD摄像机、计算机和相应的图像处理软件组成。利用图像传感器记录靶标特征点运动轨迹,经过图像处理软件的数据处理,可直接测得主轴的回转运动。由于靶标特征点的提取直接影响系统的测量精度,因此提出了以圆形标记作为靶标图案,采用面积矩方法提取圆心来提高系统测量精度。在MATLAB环境下编程实现图像处理和数据计算,采用最小区域圆法计算主轴回转误差。最后采用该系统对车床主轴进行了测量,试验证明,系统可以实现主轴回转运动精度的精确、快速测量,且精度达到微米级。
主轴回转运动精度;计算机视觉;数字图像处理;最小区域圆法
机床的主轴回转运动误差直接影响其加工工件的几何精度和表面光洁度,机床主轴如有误差运动,轴上安装的刀具或工件将失去固定的旋转中心,不仅影响形状精度、粗糙度和测量精度,同时在加工过程中会产生较大的噪声和振动,因此检测主轴回转误差并分析其产生原因,是机床加工过程中保障加工零件精度的有效措施。
在20世纪60年代,日本的大园成夫提出了基于三点法测量回转误差,即对安装在主轴上的标准球进行单点或多点测量,采集的数据受到标准球的安装和形状误差的干扰,必须进行误差分离才能得到主轴回转误差,其关键技术在于误差分离[1-2]。基于误差分离技术的传统测量方法很多,随着现代测量技术的发展已经相当完善。
本文将计算机视觉测量技术运用于机床主轴回转误差的测量中,该方法可以对主轴回转误差进行直接测量,避免了传统测量方法中必须误差分离,即标准球安装偏心和形状误差的分离,测量系统不需安装标准球或标准棒,测量方法简单[3-4]。
1 测量原理
测量系统包括特制的圆形靶标、CCD摄像机和计算机。靶标由一组印制在一个平面上的圆形图案组成,其圆心是靶标的特征点,圆心的间距精确已知。
检测主轴回转运动时,将靶标安装在精车的工件端面中心,采集图像,主轴的回转误差体现在图像上圆心随主轴回转时的跳动上。用CCD摄像机进行拍摄,提取圆形靶标的圆心,由圆心的运动轨迹可以计算出主轴的回转误差。
测量时,采用CCD摄像机检测到圆心运动轨迹,其在x方向(水平方向)和y方向(垂直方向)的分量可以用下式描述:
x=Ecos(2πft)+Δx
(1)
y=Esin(2πft)+Δy
(2)
式中:f为主轴回转频率;E为圆形靶标的安装偏心,Ecos(2πft)和Esin(2πft)分别为其安装偏心在x方向和y方向的投影;Δx和Δy为主轴回转误差e在x方向和y方向的投影[5]。 由于圆形靶标安装偏心在后期的处理当中可由计算得到,因此可以很直观显示出一个半径为E的基圆误差图。
圆形靶标的圆心可以通过检测圆心得到,若在主轴回转期间采集n幅靶标图,即可检测得到n个特征点(圆心)的坐标(xi,yi),i=1,2,…,n。这n个点的坐标可以拟合出一个最小二乘圆,设最小二乘圆心坐标为(x0,y0),半径为r,为求解(x0,y0)和r,建立方程组如下:
(3)
将式(3)展开,左右移项得到:
(4)
式(4)矩阵形式为:
(5)
写成公式:
Km=U
(6)
式中:m为未知的三维向量;K和U为已知向量。当n>3时,可以用最小二乘法求出圆心(x0,y0)和半径r。计算每个特征点圆心的距离:

(7)
采用最小区域圆法计算主轴的回转误差,可表示为:
e=max{di}-min{di}i=1,2,…,n
(8)
2 系统设计
回转轴运动误差检测系统如图1所示,调节CCD摄像头位置使得其光轴中心与靶标的大圆中心接近。靶标粘贴固定在精车试件端面,随着主轴同步旋转。靶标中大圆的圆心即为特征点,其运动直接表征了主轴的回转误差。由CCD摄像机采集图像,经计算机进行数据处理,得到特征点运动轨迹,对系统进行标定,将像素单位转换为长度单位,得到主轴回转误差。
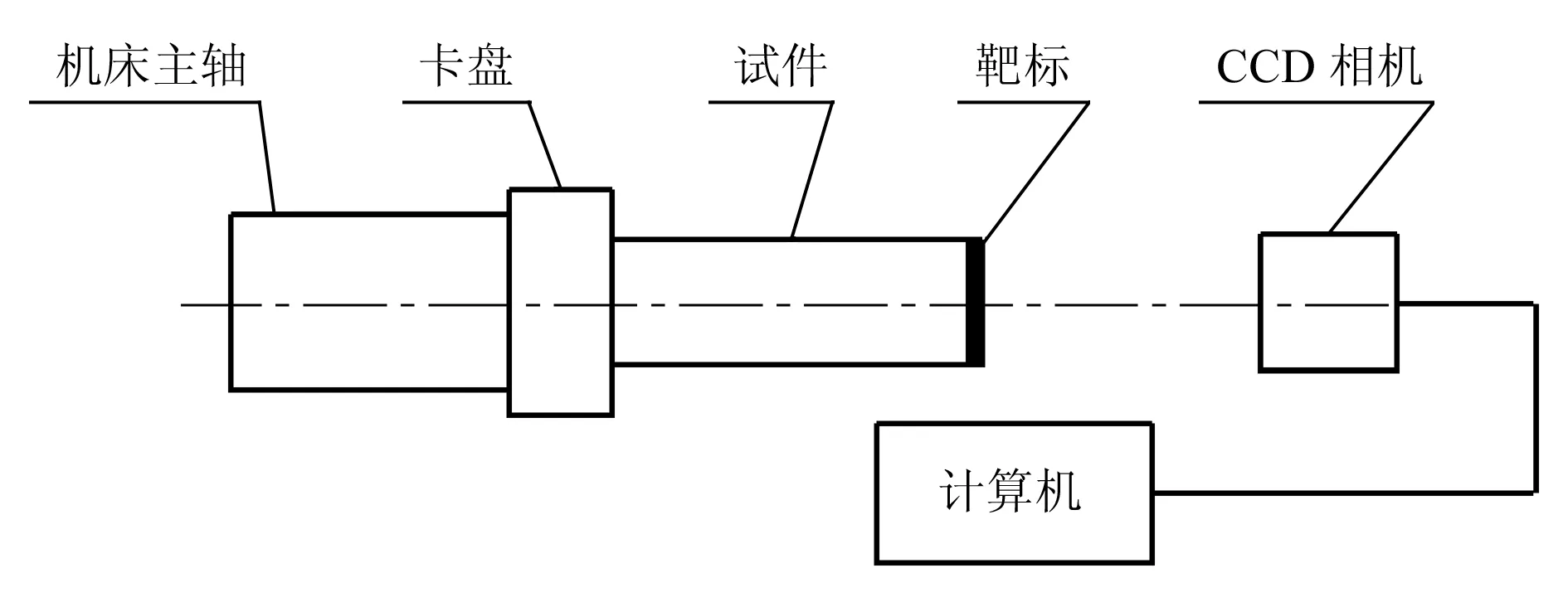
图1 系统组成图
3 靶标特征点的精确检测
3.1靶标板设计
靶标图案为圆形,背景为黑色,图案为白色,打印粘贴在一个平面上,大圆圆心是特征点。圆形图案由直径大小不同的两种圆形组成,包括8个小圆、1个大圆。大圆在靶标中心位置,水平和垂直方向各分布4个小圆。靶标图案如图2所示。本靶标在机床主轴回转检测时,将靶标图案可以直接粘贴在试件端面,且靶标模式和背景对比度达到最高(背景为黑色,灰度为0,图案白色,灰度为255)可以精确提取靶标图案。标定时主轴停止,只需采集一副靶标图案,同时检测所有小圆和大圆圆心,分别标定出水平方向和垂直方向的数据。主轴回转检测时,只需检测到大圆圆心作为特征点,其运动轨迹为主轴径向运动轨迹,大圆和小圆的面积相差3倍左右,可以很容易将所有小圆用面积过滤掉,只留大圆用于特征点检测。
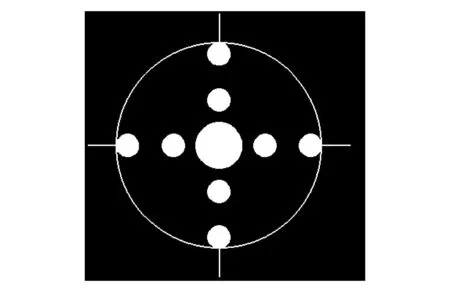
图2 标定板图案
3.2特征点的亚像素提取
显然,对于特征点的位置的精确检测能显著提高系统测量精度。一般情况下,经过透镜摄影变换,圆形图案可能成像为椭圆或非圆形状,而非标准的圆形。目前,有很多方法对成像为椭圆的形状求取中心,包括霍夫变换[6]、利用椭圆边缘像素拟合其参数方程[7-8]等,但是成像后的形状不一定是标准椭圆,而如果采用椭圆方程拟合方法则不能准确提取形心[9]。基于此,对于圆形图案成像后的图像,如果采用面积矩方法来检测特征点,更为精确。
函数的矩定义:具有两个变元的有界函数f(x,y)的矩集合Mpq。对二维连续图像,用公式表示为:
(9)
其零阶矩表示为:
(10)
零阶矩表示封闭区域的面积。
一阶矩为:
(11)
(12)
一阶矩表示封闭区域的质心。
对离散化的数字图像,公式(9)、(11)、(12)可分别表示为:
(13)
(14)
(15)
封闭区域的中心坐标为:
(16)
采用面积矩方法提取特征点步骤如下:
a.对采集的靶标图像(图3)进行二值化处理,如图4所示。

图3 采集的靶标图像
b.提取圆形靶标区域,用数f(x,y)表示提取的封闭近似圆形区域。
c.将较小面积的小圆过滤掉,提取大圆,采用面积矩方法提取大圆中心,如图5所示。
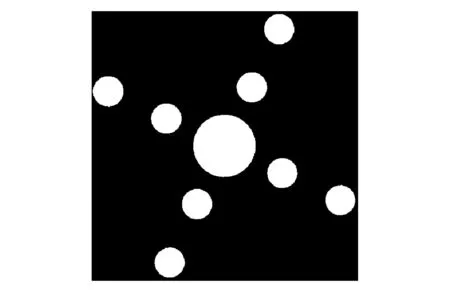
图4 靶标二值化图像
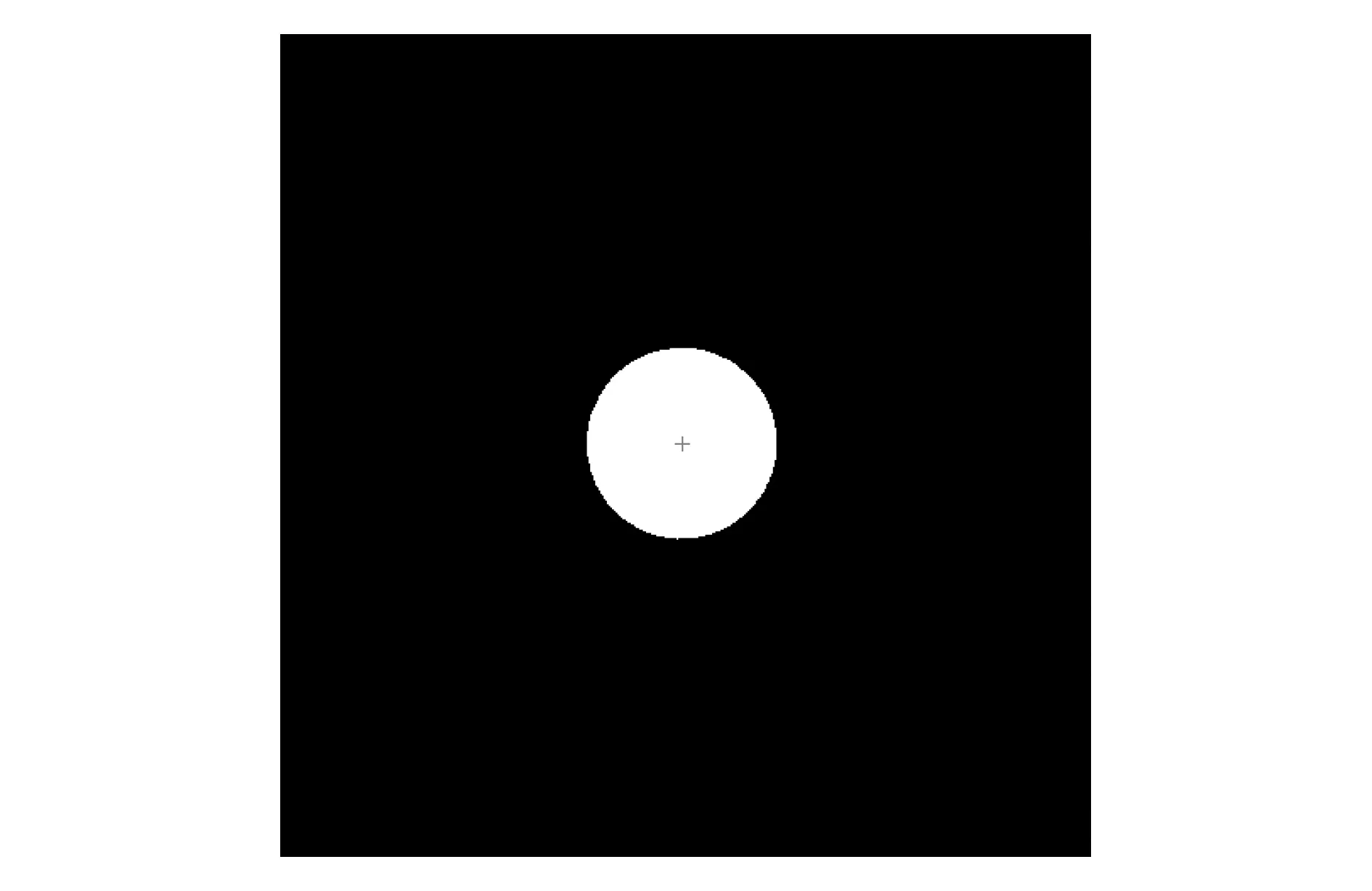
图5 提取的大圆和特征点
4 相机标定
在实际测量过程中,摄像机采集的特征点坐标以像素为单位表示,特征点实际的运动轨迹以毫米为单位表示,因此必须将数字图像像素换算成实际尺寸,这需要对相机进行标定来完成。利用靶标模型圆心之间的精确物理尺寸除以对应的像素个数,可以分别计算水平和垂直方向的标定值。在测量之前,保持摄像机和镜头焦距不变,对靶标进行静态拍摄,利用面积矩方法提取各圆圆心,并从左到右,从上到下排序,分别计算水平方向和垂直方向的每个圆心之间的距离并求平均,得到圆心的平均距离为dH和dV(假设两个圆心距离为di,i=1,2,…,图像中平均圆心距离dH=(d1+d2+…+d5)/5,单位为像素,将其与靶标实际物理尺寸lH和lV进行换算,lH/dH,lV/dV单位为μm/pixel。实际回转误差为e·lH/dH,单位为μm。
实际圆心间距为10 000μm,实验求出水平方向圆心平均距离为159.950 7pixel,垂直方向圆心平均距离为159.960 1pixel,则水平方向标定值为62.52,垂直方向标定值为62.51。
5 试验及结果
实际测量试验如下:机床选用MAZAK数控车铣复合中心,分别设定机床转速为150,200,300r/min,相机为IMAGING SOURCE的DMK 23U445,分辨率为1 280×960。相机连续采集200幅靶标图,经处理得到每幅图中特征点的坐标,去掉误差大于3倍标准差的点,计算实际回转误差如图6所示,其中最小的圆为最小内接圆,中间的圆为基圆,最大的为误差最大外接圆,用最小区域圆法计算实际回转误差,各转速下最小误差为6.808μm。各转速下测量的回转误差见表1。
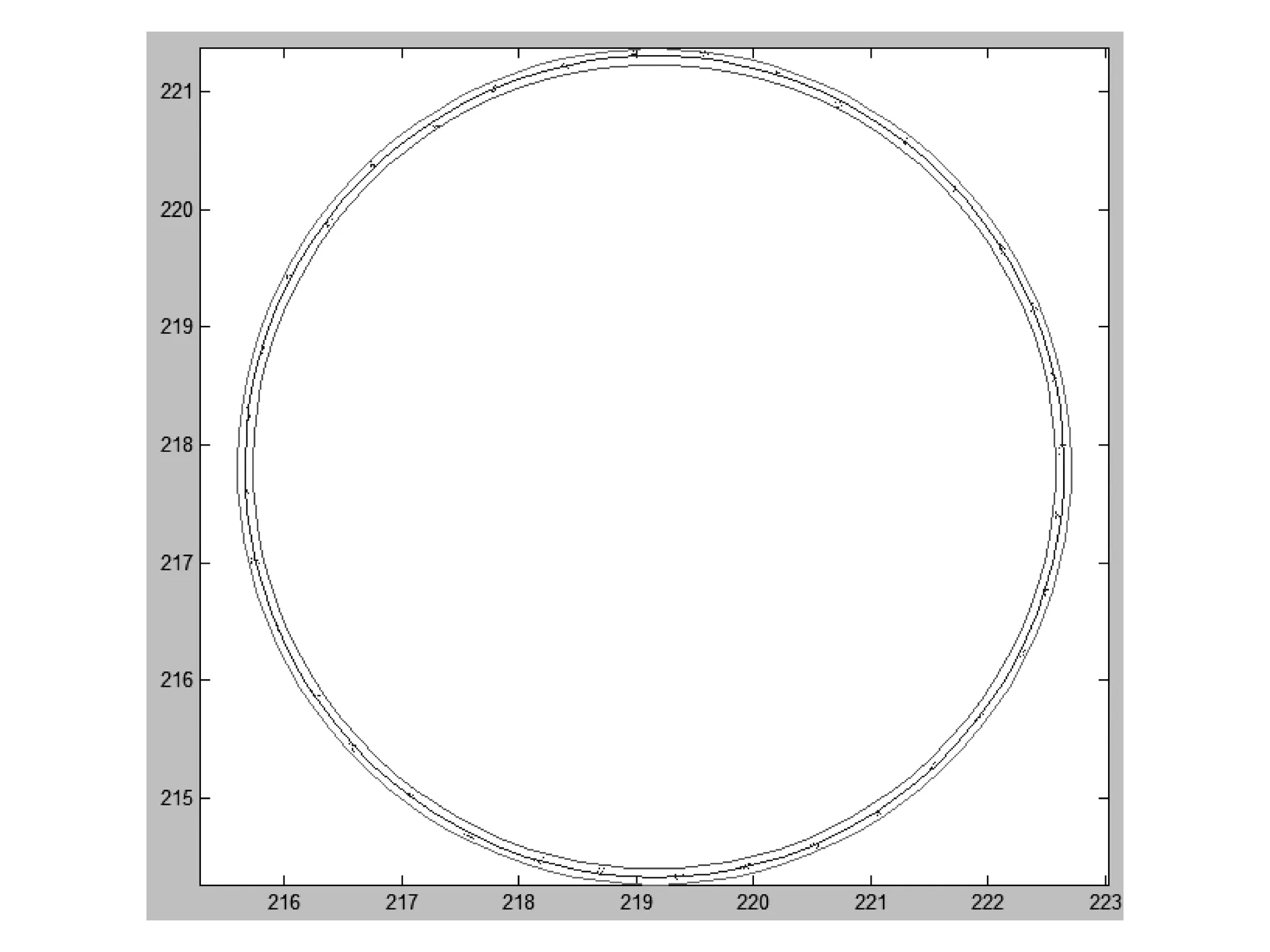
图6 主轴回转误差
表1主轴径向运动测量数据
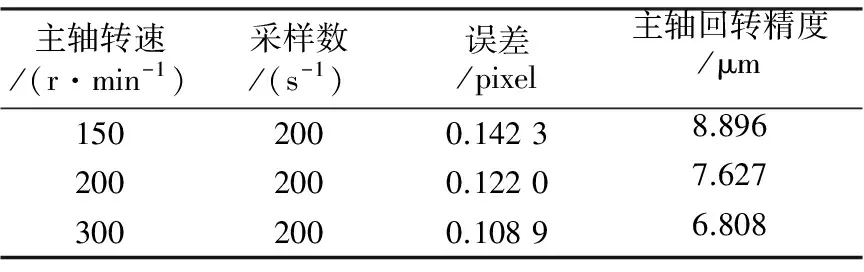
主轴转速/(r·min-1)采样数/(s-1)误差/pixel主轴回转精度/μm1502000.14238.8962002000.12207.6273002000.10896.808
6 结束语
本文提出一种基于计算机视觉的主轴回转运动精度测量系统。为了提高系统测量精度,采用圆形靶标图案及面积矩特征点提取方法可以实现特征点的高精度亚像素级提取。使用该系统对车床主轴的回转运动进行实际测量,精度可以达到微米级,试验证明,本系统对于回转类仪器的运动测量具有较高的实用价值。
[1] 罗海燕,翟超,金熠,等.光电系统检测回转误差的实验研究[J].仪器仪表学报,2008(9):2141-2145.
[2] 青木保雄,大园成夫. 三点法真圆度的测定法展开[J].精密机械,1966,32(12):831-836.
[3] 卢清,张宪民,范彦斌.计算机微视觉在微运动测量中的应用[J]. 机电工程技术,2007,36(12): 93-94.
[4] 朱铮涛.基于计算机视觉图像精密测量的关键技术研究[D].广州:华南理工大学,2004.
[5] 袁德亮,赵转萍.显微视觉主轴回转误差测量[J].机械与电子,2010(1):36-39.
[6] Princen J ,Kittler J. A formal definition of the hough transform: properties and relationships[J]. Mathematical Imaging and Vision, 1992, 5(1): 153-168.
[7] Fitzgibbon A W,Pilu M,Fisher R B. Direct least squares fitting of ellipses[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1999, 21(5):476-480.
[8] 黄桂平.圆形标志中心子像素定位方法的研究与实现[J].武汉大学学报:信息科学版,2005,30(5):388-391.
[9] Valkenburg R J,Mclvor A M,Power P W. An evaluation of subpixel feature localization methods for precision measurement[C]//Proceedings of SPIE: Videometrics III , Boston, MA. USA, 1994,v2350:229-238.
AnAccuracyMeasurementSystemofSpindleRadialMotionBasedonComputerVision
GUAN Fangfang1,2, CHENG Xiaosheng1
(1.Nanjing University of Aeronautics and Astronautics, Jiangsu Nanjing, 210016, China)(2.Nanjing Institute of Technology, Jiangsu Nanjing, 211167, China)
It introduces a system for measuring spindle rotary motion accuracy based on computer vision technology. The system is made up of image sensor, computer and image processing software. Trajectory of target feature point is recorded by the CCD image sensor, and spindle rotary motion is measured directly, avoiding the traditional approach to obtain rotational error by error separation. Target feature points extracted affect directly the measurement accuracy of the system, so it designs a target round mark and a more accurate method to extract the center area in order to improve system accuracy. In the MATLAB programming environment, it calculates the error of spindle rotation using the minimum zone circle method. Tests show that the system can measure the spindle rotary motion error rapidly and accurately, and the precision can reach micron level.
Spindle Rotary Motion Accuracy; Computer Vision; Digital Image Processing; Minimum Zone Circle Method
10.3969/j.issn.2095-509X.2014.08.012
2014-07-07
江苏省自然科学基金资助项目(BK20130793);南京工程学院科研基金资助项目(QKJB2011026)
关芳芳(1977—),女,陕西宝鸡人,南京工程学院讲师,南京航空航天大学博士研究生,主要研究方向为数字化设计制造和计算机视觉测量。
TH741
A
2095-509X(2014)08-0050-04
