基于ADAMS的方程式赛车前悬架分析与优化
2014-09-05智淑亚
骆 阳,智淑亚,张 劼
(1.金陵科技学院 机电工程学院,江苏 南京 211100)(2.武汉理工大学 汽车工程学院,湖北 武汉 430070)
基于ADAMS的方程式赛车前悬架分析与优化
骆 阳1,智淑亚1,张 劼2
(1.金陵科技学院 机电工程学院,江苏 南京 211100)(2.武汉理工大学 汽车工程学院,湖北 武汉 430070)
针对某型大学生方程式赛车前悬架系统进行分析与优化。利用动力学软件ADAMS/CAR建立该赛车前悬架多柔体模型,并在弹性运动学模式下进行仿真。分析了双轮平行跳动时悬架运动特性和赛车制动时的转向轻便性与抗点头性,结果显示主销内倾角、车轮外倾角、转向盘力矩与磨胎半径变化规律不符合设计要求。运用ADAMS/INSIGHT对原系统进行多目标优化,最终各参数均得到优化,改善了悬架系统的运动学特性与赛车的转向轻便性。
方程式赛车;ADAMS;多柔体;仿真;多目标优化
大学生方程式汽车赛是近年来由汽车相关专业学生参与设计与制造的比赛,旨在提高学生设计与创新能力。在赛车研发过程中,悬架系统的设计与优化将直接影响赛车的操纵稳定性、轮胎使用寿命等性能。当悬架系统中的构件加速或受到较大载荷时会发生较大变形,对悬架运动产生影响,这就要求在对悬架系统仿真分析时应考虑构件的柔性。目前国内在悬架柔性体方面的研究较少,且存在考虑不周和分析方法不合理等问题。ADAMS为汽车动力学研究提供了强大的数学分析工具,其中CAR模块可以完成悬架系统的建模与仿真,但在参数优化方面存在缺陷,INSIGHT模块可弥补该缺陷,通过平方和加权法解决多目标优化问题,得到最优值。本文结合某型FSC赛车前轮双横臂独立悬架[1],运用ADAMS对其仿真与优化,为悬架系统的研究提供了方法与技术支持。
1 建立悬架模型
1.1悬架系统的三维模型及拓扑结构
根据FSC设计要求,在CATIA中建立悬架系统的各构件,并进行装配[2],如图1所示,在CATIA中可得到各点坐标。双横臂独立悬架由多节点联结的RSSR(R表示旋转副,S表示球面副)空间连杆结构组成[3],根据悬架的实体结构及空间构造,建立其空间拓扑结构如图2所示,由于悬架具有左右对称性,因此该图只针对悬架左侧部分。
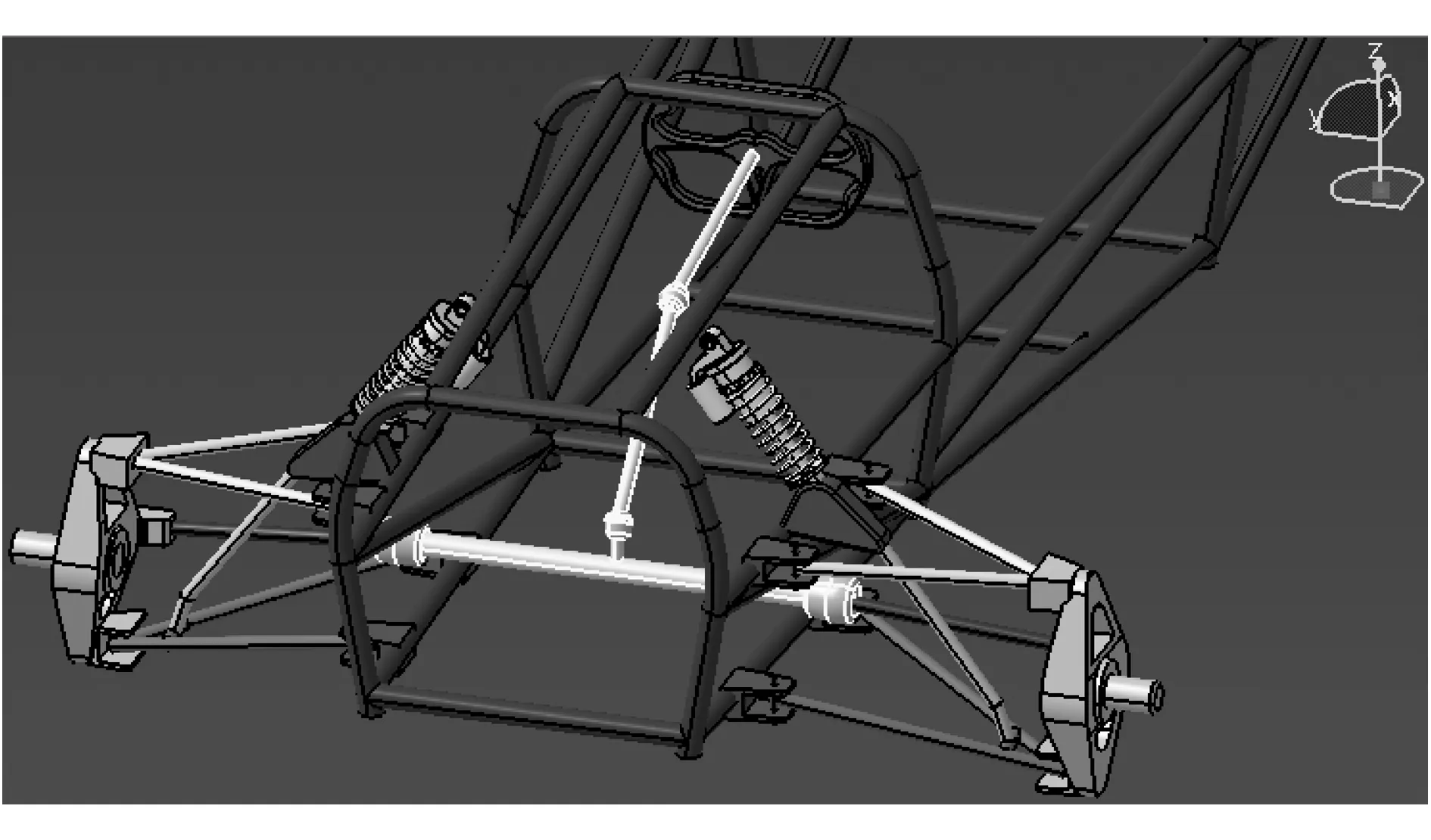
图1 悬架三维模型
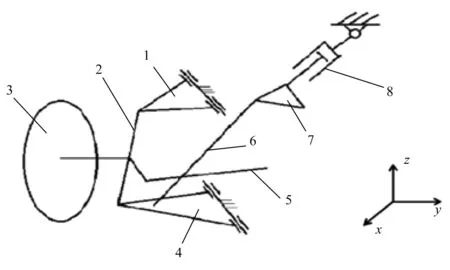
1—上横臂;2—主销;3—车轮;4—下横臂;5—转向横拉杆;6—推杆;7—减震器;8—摇臂
1.2建立悬架系统的多柔体模型
资料表明,在对悬架系统的仿真分析中,应注意以下几点:
a.弹性约束的运动学模型比刚性约束的运动学模型更能精确地反映悬架的实际运动状况[4]。
b.仿真分析时不可忽视悬架摩擦对悬架运动的影响[5]。
c.悬架系统多柔体模型的仿真误差小于多刚体模型的仿真误差[6]。
按照CATIA中得到的硬点坐标在ADAMS/CAR中对悬架系统建模时考虑了橡胶轴套的弹性特性,分别使用轴套代替上下横臂和摇臂与车架间连接的转动副、减震器与车架间连接的球形副,实现了以弹性约束代替刚性约束。该赛车悬架摩擦主要来自于悬架系统构件间的球形副与转动副,通过实验测得球形副中动、静摩擦系数分别为0.06,0.10,转动副中动、静摩擦系数分别为0.08,0.11,在创建运动副时输入上述相应数据。对形状简单的构件,使用ADAMS自动柔化功能将其转换为柔性体,通过ADAMS/Autoflex直接在CAR中生成上下横臂、转向节及转向横拉杆的柔性体模态中性文件(MNF),并用柔性体代替模型中的刚性体,通过建立Interface part来建立该柔性体与其他构件间的约束,得到该柔性体模型如图3所示。同时轮胎的弹性对悬架运动的影响不可忽视,这里选用UA轮胎模型,设置的参数见表1。另外,减震器简化为由线性弹簧与阻尼组成,最终建立的悬架系统多柔体模型如图4所示。

图3 上下横臂、转向节及横拉杆柔性体
表1轮胎特性参数
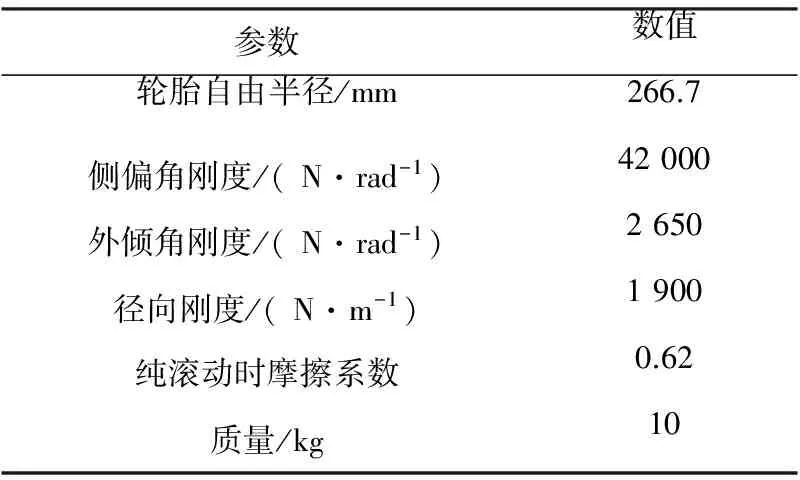
参数数值轮胎自由半径/mm266.7侧偏角刚度/(N·rad-1)42000外倾角刚度/(N·rad-1)2650径向刚度/(N·m-1)1900纯滚动时摩擦系数0.62质量/kg10
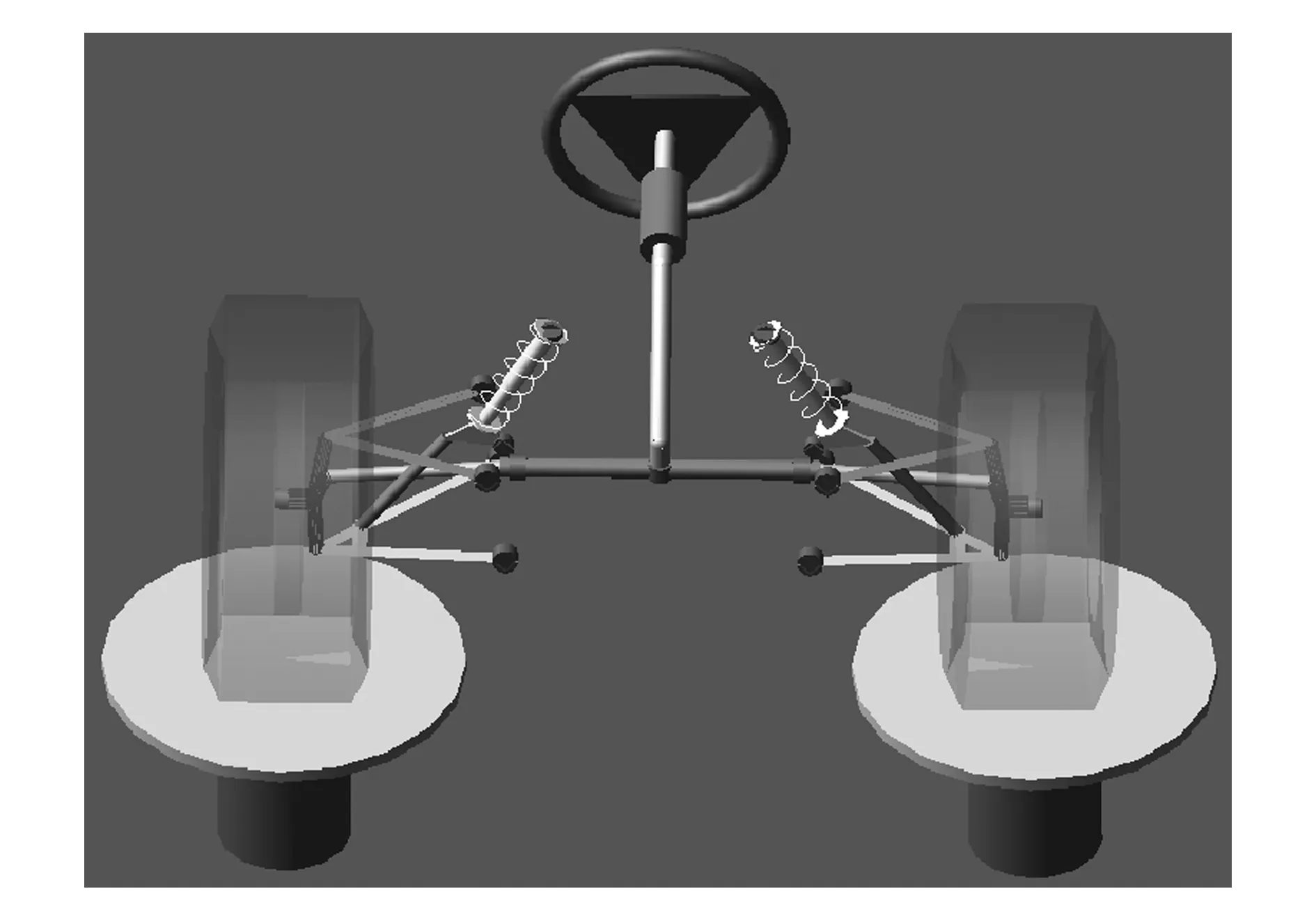
图4 前悬架系统多柔体模型
2 悬架系统的仿真分析
2.1双轮平行跳动分析
悬架采用双轮平行跳动时,设车轮上下跳动范围为±50mm,轮距为1 220mm,簧载质量为198kg,簧上质量质心高度为276mm,前后轴制动力比为46∶54。最后在compliant (顺应态)模式下执行仿真(只有在该模式下上述建立的弹性约束才能取代刚性约束,使仿真模型为弹性运动学模型)。
主销后倾角和内倾角对赛车车轮均有回正作用,前者主要作用于高速段,后者主要作用于低速段,使车轮在整个车速范围内都有适当的回正作用。仿真后通过后处理模块ADAMS/PostProcessor得到相关参数的变化曲线。图5为各前轮定位参数变化曲线。主销后倾角大一些有利于汽车直线行驶的稳定性,但会加大转向盘的转动力矩,一般取 2°~3°[7]。由图5得主销后倾角变化范围为2.489°~2.533°,满足理想变化范围,无需优化。受结构限制,主销内倾角取值一般为7°~13°。由图5可知,主销内倾角变化范围为6.192°~9.709°,其值偏小,需优化。
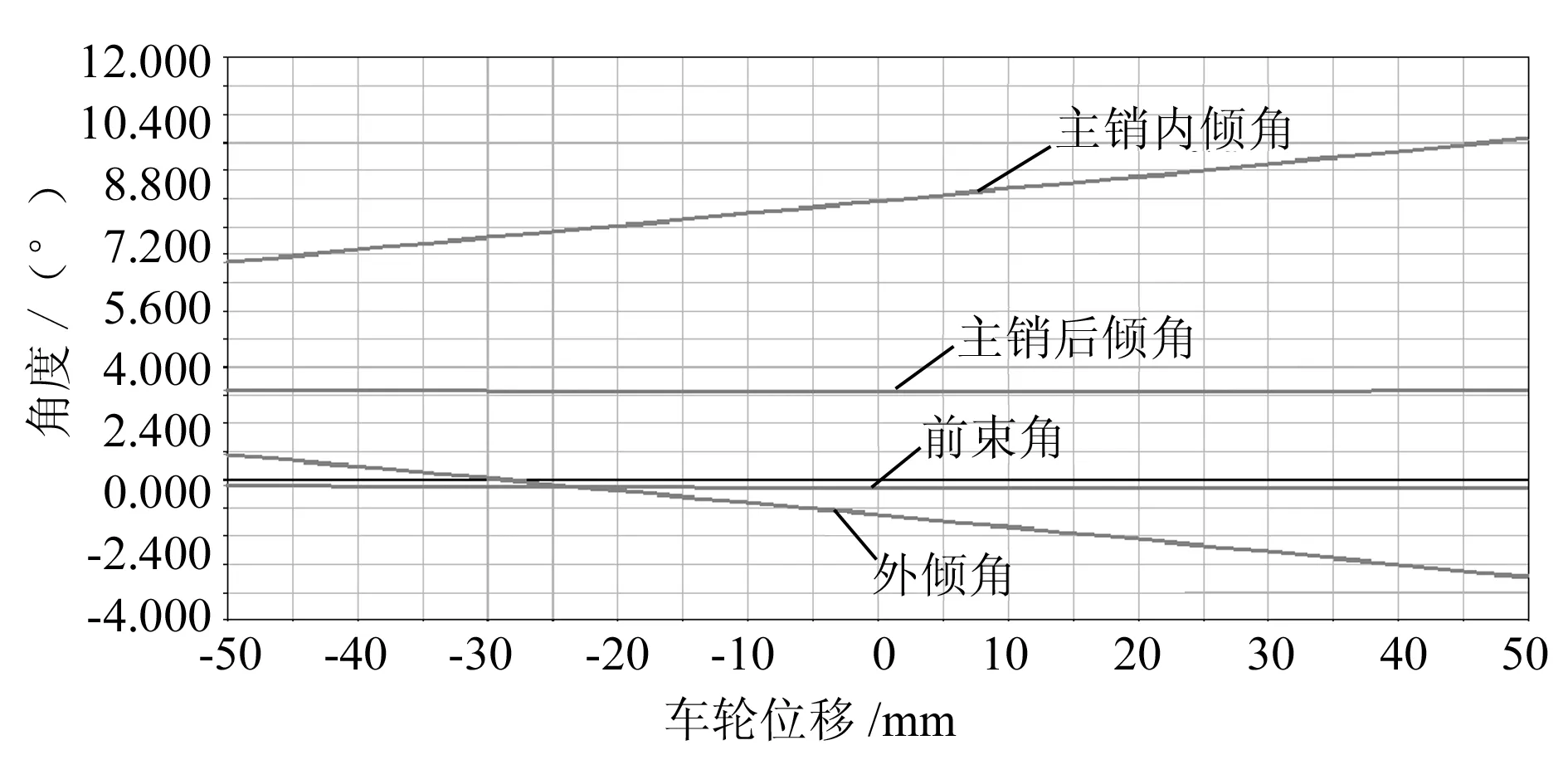
图5 前轮定位参数变化曲线
合适的外倾角可提高汽车操纵的稳定性,若其值变化过大则将降低轮胎的侧向附着能力,加速轮胎磨损。由图5可知,前轮外倾角变化范围为-2.788°~0.726°,范围偏大,不符合理想的变化范围-2°~0.5°[8],需优化。设计外倾角可控制车轮车身质量压力点并减轻轮毂外轴承、锁紧螺母的负担,但常会使左右轮作用着方向相反并与外倾角相对应的侧倾推力,加剧轮胎磨损,为此需要选择适当的前束角以避免额外的胎体磨损和能耗。由图5可知,前束角其值变化范围为(-0.258°~-0.177°)/50mm,满足理想的变化范围(-0.5°~0°)/50mm[7],无需优化。
当车轮跳动时转向盘位置固定,在转向拉杆作用下导致左右车轮绕主销转动,从而使左右车轮产生转向角,转向角过大会影响汽车的操纵稳定性且加剧轮胎磨损。由图6可知左右轮转向角变化趋势相反,假设左轮左转时转向角为负,右轮左转时转向角为正,则转向角变化范围为(-0.04°~0.09°)/50mm,该范围符合设计要求,无需优化。
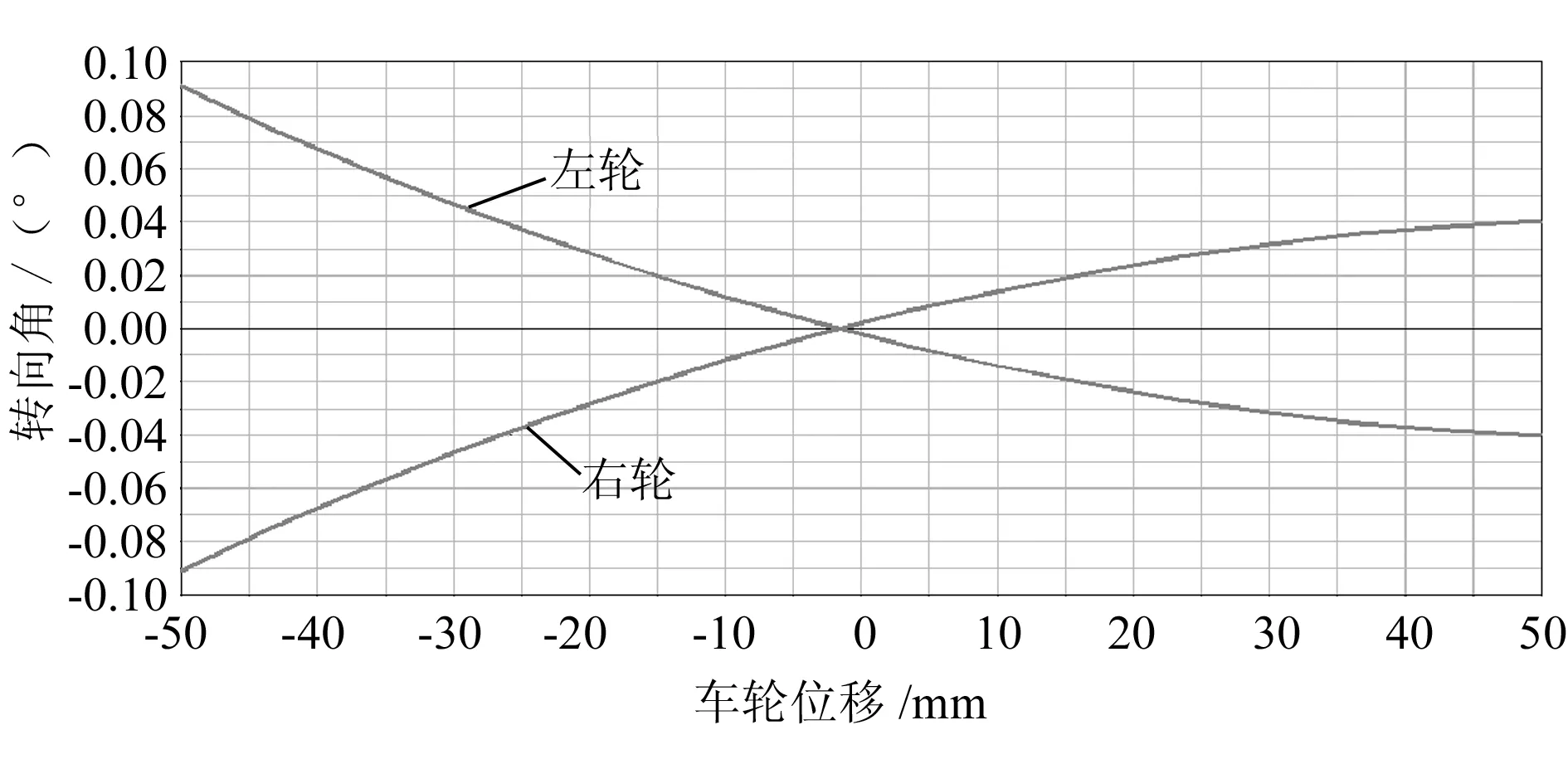
图6 转向角变化曲线
2.2施加制动力分析
赛车在跑道上经常出现转向与制动同时进行的情况,赛车手需对转向盘施加一定的力矩以实现转向,赛车制动时该力矩受制动力影响,应满足一定要求才能保证转向的轻便性。在ADAMS/CAR中通过Test Rig(试验台)对转向盘作用一定的转向盘力矩,在保持输入制动力的情况下,将转向盘转过一定角度,通过后处理模块可得到转向盘力矩与转向盘转角的关系。该赛车总质量为220kg,传动比为2,仿真时设置赛车速度为80km/h,制动减速度0.8g,转向盘转角范围为-45°~45°,该赛车前后轴制动力比为46∶54,前左、右轮分配等大的前轴制动力,最终算得前左、右轮制动力均为397N,将其输入进行仿真,得出转向盘力矩与转向盘转角的关系曲线如图7所示,由图可得转向盘力矩变化范围为(-9.6~9.3)N·m,由于方程式赛车未设计助力转向装置,其转向轻便性的评价标准与汽车不同,通过与其他相同规格赛车的转向轻便性相比,该车转向轻便性能较差,转向盘力矩需优化。
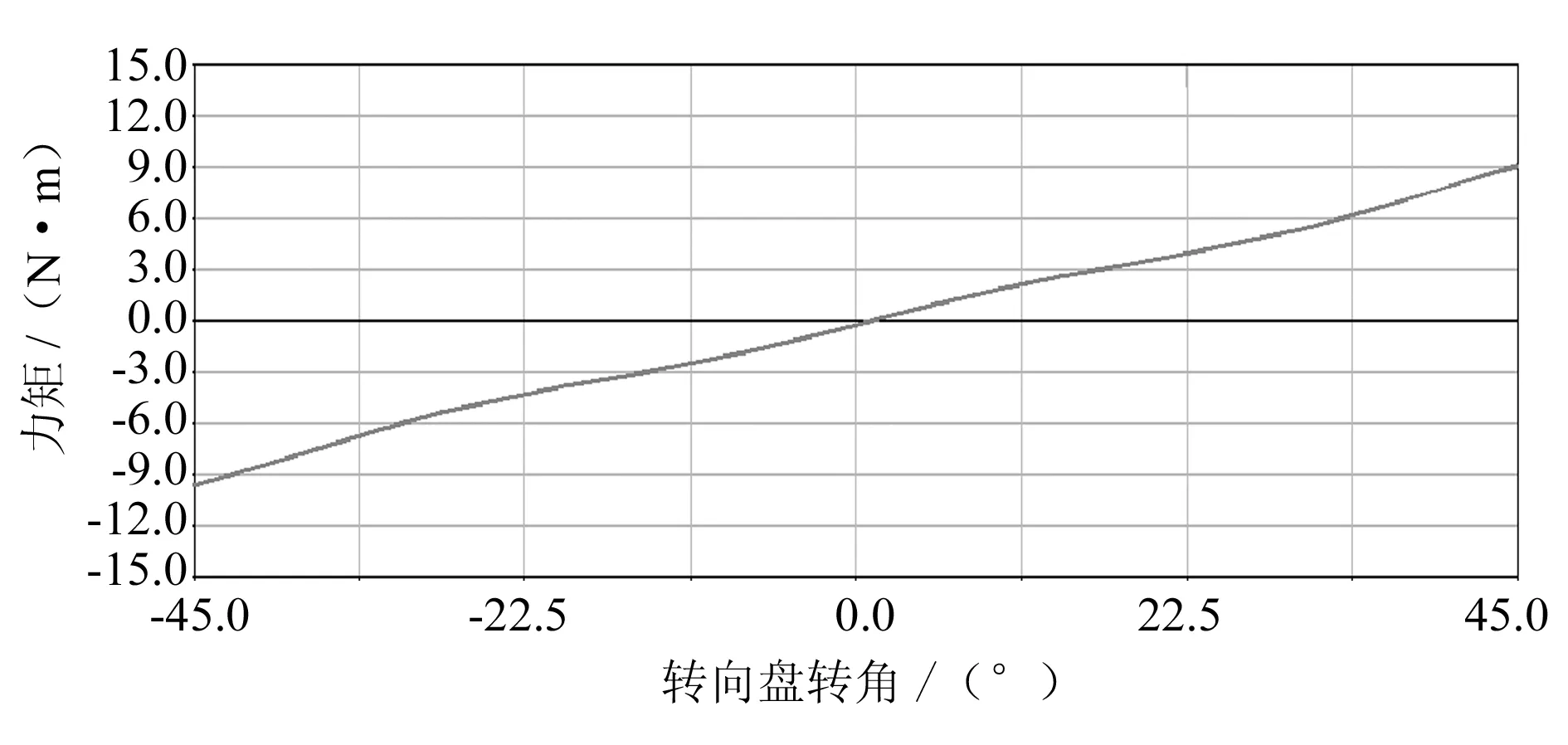
图7 转向盘力矩与转向盘转角关系
磨胎半径指转向轴线(主销)或其延长线的落地点与轮胎接地印迹中心线之间的距离,磨胎半径的存在会导致纵向力(包括驱动力与制动力)转向,影响制动方向稳定性,需尽量减小。在上述仿真中可以得到磨胎半径与转向盘转角的关系,如图8所示,在±45°转角内,磨胎半径变化范围为(14.71~14.89)mm,与国外方程式赛车一般要求小于10mm相比,该值偏大,需优化。
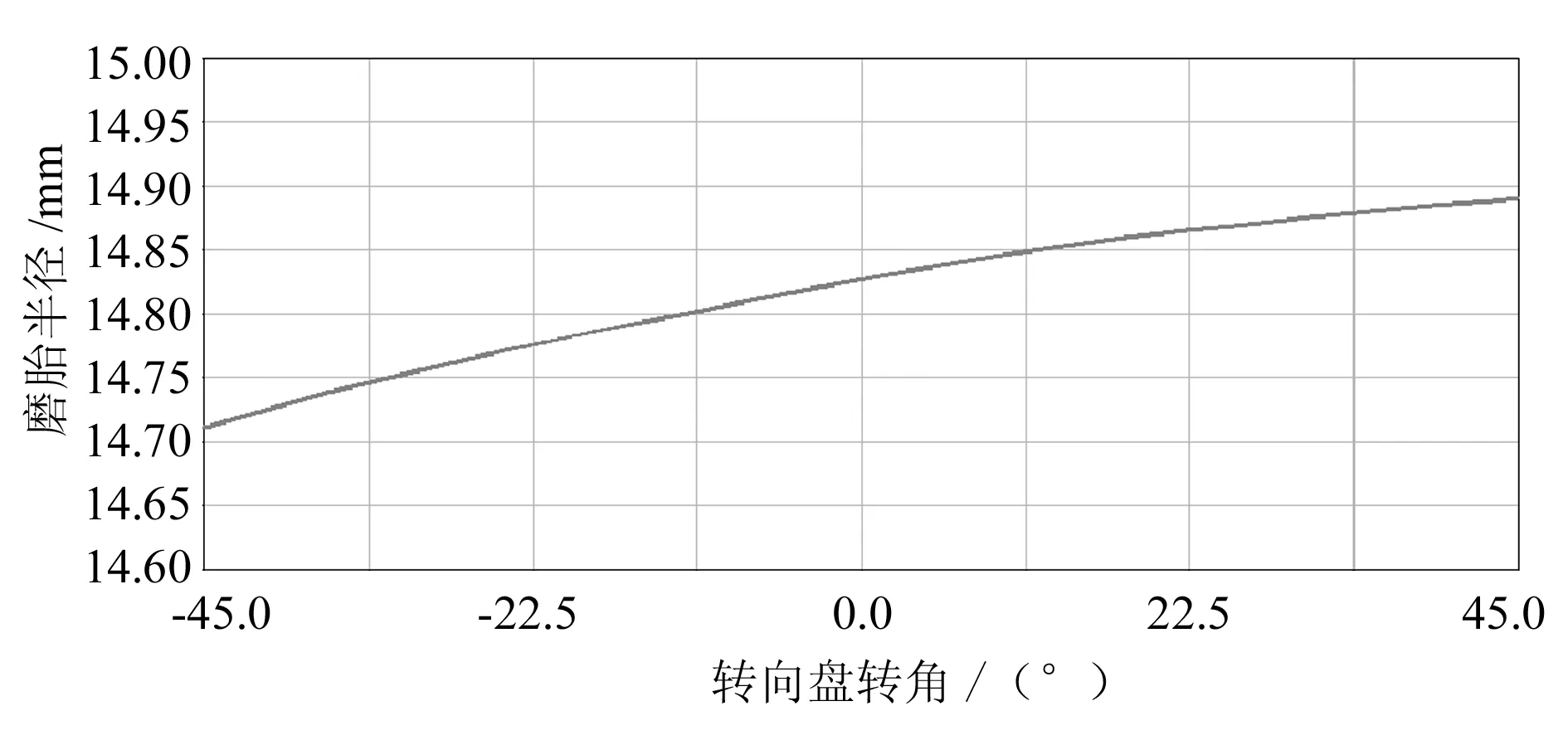
图8 磨胎半径与转向盘转角关系
在制动过程中,赛车前后轴的轴荷转移会使前悬架产生点头现象,对赛车操纵稳定性等方面有较大影响,悬架的抗点头率是影响制动点头性能最重要的因素,抗点头率的大小直接影响制动点头的效果。图9为平行轮跳时悬架的抗点头率,由图可得抗点头率变化范围为23.1%~31.5%,符合推荐值20%~25%[9],说明该赛车抗点头性能优越。
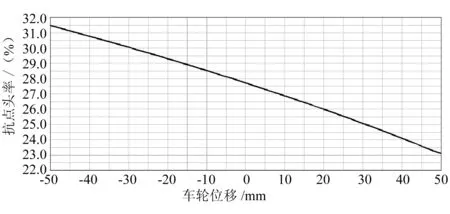
图9 抗点头率
3 悬架系统的优化
3.1确定优化目标并优化
由以上分析可知,主销内倾角、前轮外倾角、转向盘力矩及磨胎半径的变化范围不够理想,利用ADAMS中的试验设计与分析模块INSIGHT对其优化。大量试验表明内倾角与外倾角主要受上下横臂与车架铰接点的Y,Z坐标值影响,优化时选择内倾角与外倾角为一组优化目标,考虑到计算量的大小,这里只选择上述坐标值为设计变量。转向盘力矩与磨胎半径主要受上下横臂与转向节铰接点的Y,Z坐标值影响,优化时选择转向盘力矩与磨胎半径为另一组优化目标,上述坐标值为设计变量。两组优化目标的设计变量变化范围均设置为-6mm~6mm。
3.2优化前后参数特性比较
对各优化目标的实验分析结果以网页(Web)形式显示,这里只给出设计变量对主销内倾角的影响系数,如图10所示。图中Effect值指该坐标值的变化对优化目标的影响百分比,Effect值为正值时表示正效应,即优化目标随着设计变量的增大而增大,负值则相反。对于内倾角与外倾角这一组优化目标,运用平方和加权法可以解决其优化问题。根据坐标值对优化目标的影响选择相关坐标值为设计变量,设置好优化目标的加权系数后点击运行,得到优化结果如图11所示,根据优化结果(图中value值)修改设计变量的值。另一组优化目标可通过同样方法得到优化。

图10 优化变量对主销内倾角的影响系数(百分比)
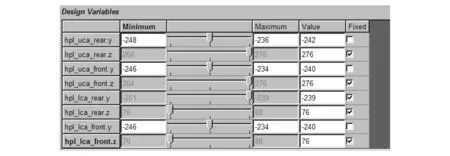
图11 平方和加权法优化结果
修改相关硬点的坐标值后再次进行仿真,最终得到优化前后各参数变化曲线,如图12~15所示:主销内倾角变化范围由优化前的6.192°~9.709°变为7.283°~8.689°,属于理想状态;车轮外倾角变化范围由 -2.788°~0.726°变为-1.768°~-0.367°,符合设计要求;转向盘力矩变化范围由(-9.6~ 9.3)N·m变为(-3.5~ 3.3)N·m,力矩显著降低,使转向更轻便;优化后磨胎半径范围由(14.71~14.89)mm变为(4.81~4.89)mm,也符合要求。可见,各优化目标均得到改善,验证了此次多目标优化试验的正确性。
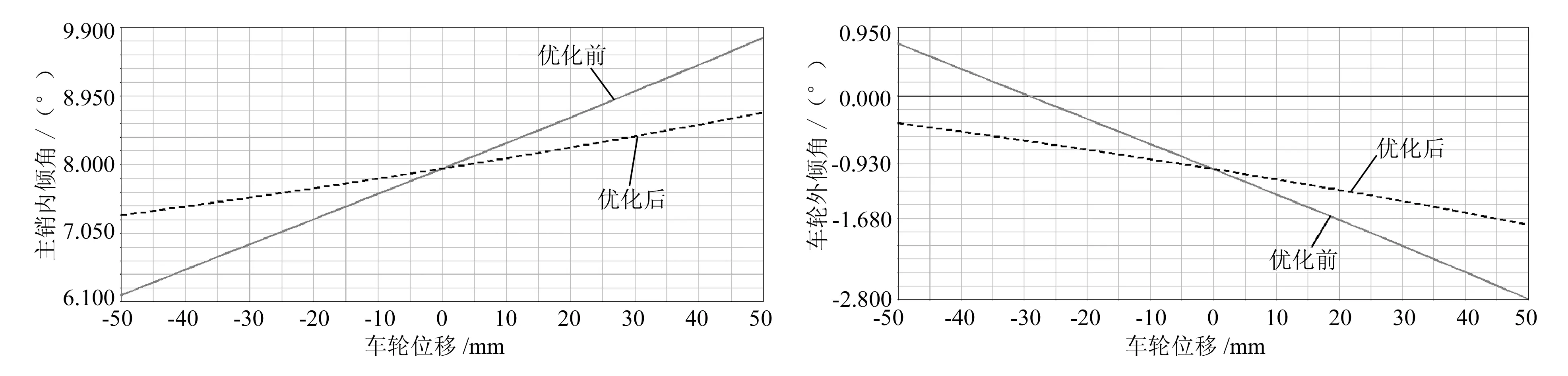
图12 优化前后主销内倾角变化曲线 图13 优化前后车轮外倾角变化曲线
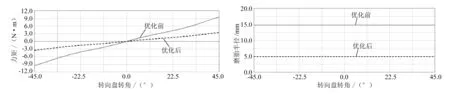
图14 优化前后转向盘力矩与转向盘转角关系 图15 优化前后磨胎半径与转向盘转角关系
4 结束语
本文在考虑上下横臂、转向节、转向横拉杆和轮胎的柔性以及橡胶轴套弹性的基础上,运用ADAMS/CAR对某型FSC赛车前悬架系统进行建模、仿真。针对出现的不足,利用ADAMS/INSIGHT进行优化,最终主销内倾角、前轮外倾角、转向盘力矩及磨胎半径大小及变化范围均得到改善,从而改善了悬架系统的运动学特性与赛车的转向轻便性,为赛车悬架系统的进一步研究提供了方法与技术支持。同时为其他汽车悬架系统的研究提供了参考。
[1] 陈家瑞. 汽车构造[M]. 北京:机械工业出版社,2009:68-70.
[2] 任凯,王军杰,吴德宏. 基于ADAMS/CAR的微型客车麦弗逊前悬架仿真和优化设计[J]. 机械设计与制造,2010(3):36-38.
[3] 黄杰文,黄菊花. 利用ADAMS/CAR对双横臂悬架的动态仿真与分析[J]. 现代制造工业,2010(3):127-129.
[4] 程源,张翼,陈少林,等. 基于 ADAMS/CAR 的麦弗逊式悬架建模和仿真[J]. 轻型汽车技术,2011(8):25-27.
[5] 俞磊. 底盘无簧悬架刚度与悬架摩擦[J]. 上海汽车,2009(4):17-18.
[6] 杨柳青. 基于ADAMS的悬架多柔体动力学仿真[J]. 拖拉机与农用运输车,2006,33(2):48-49.
[7] 戴海燕,周金. 基于ADAMS的悬架仿真分析[J].实验科学与技术,2010,8(3):29-31.
[8] 《汽车工程手册》编辑委员会. 汽车工程手册:设计篇[M]. 北京:人民交通出版社,2001:148-150.
[9] 王黎明. 中国高新技术企业乘用车制动点头影响因素及性能优化分析[J].汽车工程,2012(6):28-31.
TheAnalysisandOptimizationontheFrontSuspensionSystemofaFormulaRacingVehicleBasedonADAMS
LUO Yang1, ZHI Shuya1, ZHANG Jie2
(1.Jinling Institute of Technology, Jiangsu Nanjing, 211100, China)(2.Wuhan University of Technology, Hubei Wuhan, 430070, China)
It introduces the analysis and optimization of front suspension system for a certain type of Formula Student China (FSC) racing vehicle. It establishes the flexible multi-body model of the front suspension system for racing vehicle and obtains the elastic kinematics mode with dynamic software ADAMS/CAR, analyzes the kinematic characteristics of suspension system in the test of parallel wheel travel and the steering handiness and anti-dive performance in test of braking. The analysis results show that the laws of kingpin inclination angle, camber angle, steering wheel torque and scrub radius are unfit for designation requirements. It defines the multi-objectively optimization system by ADAMS/INSIGHT and gives each parameter finally. This optimization design improves the system's kinematic characteristics and steering handiness.
Formula Racing Vehicle; ADAMS; Flexible Multi-body; Simulation; Multi-objective Optimization
10.3969/j.issn.2095-509X.2014.08.009
2014-07-07
金陵科技学院资助项目(jit-n-201311)
骆阳(1989—),男,江苏南京人,金陵科技学院本科生,主要研究方向为汽车CAE应用及系统动力学。
U463.33+1
A
2095-509X(2014)08-0037-05
