基于嵌入式开发的便携式水域测量系统
2014-08-25岳建平宁振国周航宇
王 雪,岳建平,宁振国,周航宇
(河海大学 地球科学与工程学院,江苏 南京 210098)
基于嵌入式开发的便携式水域测量系统
王 雪,岳建平,宁振国,周航宇
(河海大学 地球科学与工程学院,江苏 南京 210098)
基于水下地形测量原理,通过设计全新的船体结构和双动力系统,加载船载的GPS RTK和测深仪,完成了测量船的基本制造装配。通过开发岸基控制模块自动导航软件及基于嵌入式的船载控制模块,实现了遥控测量船的水下地形数据采集和远程控制功能。
遥控测量船;嵌入式;GPS RTK;测深仪;自动导航
随着现代测绘技术的发展,人们通过各种手段获取了地球表面陆地部分较为详细的地形信息,但是对地球大部分水域信息还缺乏了解。近年来,国内外相继推出了数种遥控测量船和无人船水域测量机器人系统,这些产品在水域调查、航道测量、危险水域水下测量等领域得到了广泛应用,但都难以解决便携与功能需求的矛盾。因此,本文开发了全新的便携式水域测量系统,通过设计全新的船体结构和动力系统,解决了便携、安全、稳定、续航、动力等问题,提高了遥控测量船的稳定性和续航时间。
1 系统原理与船体设计
1.1 水下地形测量原理
水下地形测量,就是利用测量仪器来确定水底点三维坐标的过程。实际测量过程中,一般采用GPS RTK获取水面点的三维坐标,测深仪获取相应点的水深,利用GPS RTK高程减去相应的水深得到水底点的高程,从而得到水底点的三维坐标。在水下地形测量的过程中应该特别注意时间的同步性,以保证水下地形测量的精度。
1.2 遥控测量船设计
遥控测量船船长1.05 m,宽0.8 m,高0.4 m,配上可拆卸的平衡翼后长1.50 m,宽1.30 m。相比于以往的船体设计,该船更小巧轻便,同时,可部分拆卸后放入汽车后备箱以实现便携的目的。在平衡翼的辅助下,船体可以在3~4级风浪的情况下平稳运行。船体采用双体线性设计,能够有效降低船体自重,同时也能增加船体在波浪中的稳定性,从而增加抵抗风浪的能力。船体设计如图1所示。
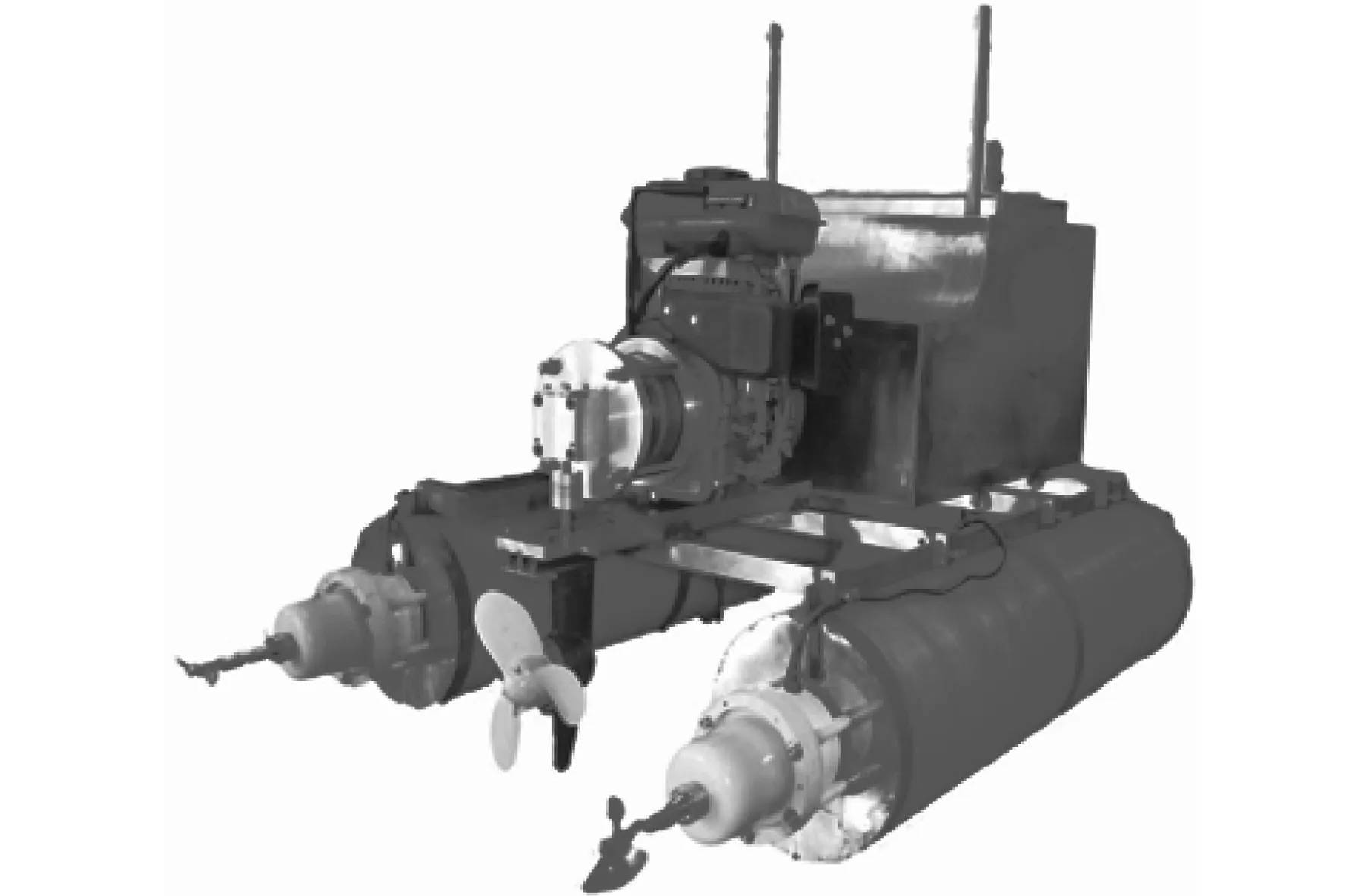
图1 船体实物图
遥控测量船采用油电双动力系统。船体主动力采用汽油机,当汽油机出现故障时,可采用电动机辅助。为增加系统可靠性并减少复杂的传动结构,汽油机和电动机控制不同的舵机。汽油机居后尾中部,单独使用舵机,通过舵机和主动力,可以实现船体的加速、转向和减速;在左右后部各安装电动机,在主动力失效时,可通过控制电动机的速度来实现转向的目的。测量船中的用电设备通过蓄电池供电,蓄电池可以通过汽油机带动发电机供电,以实现长时间的续航工作。双动力系统在提供
足够动力的同时能减少蓄电池配备的数量,有效降低船体的自重。该动力系统设计能满足长时间野外工作的需要,而不需要携带大量的蓄电池备用,只需要携带足够的汽油即可。目前,测量船经过全新设计和长时间实验改进已经能实现远程遥控航行,能实现长时间续航的要求。
2 系统集成与应用
便携式水域测量系统主要由船载控制模块和岸基控制模块两大部分组成,两部分承担不同的工作,通过无线通信实现水下地形自动化测量,系统组成如图2所示。
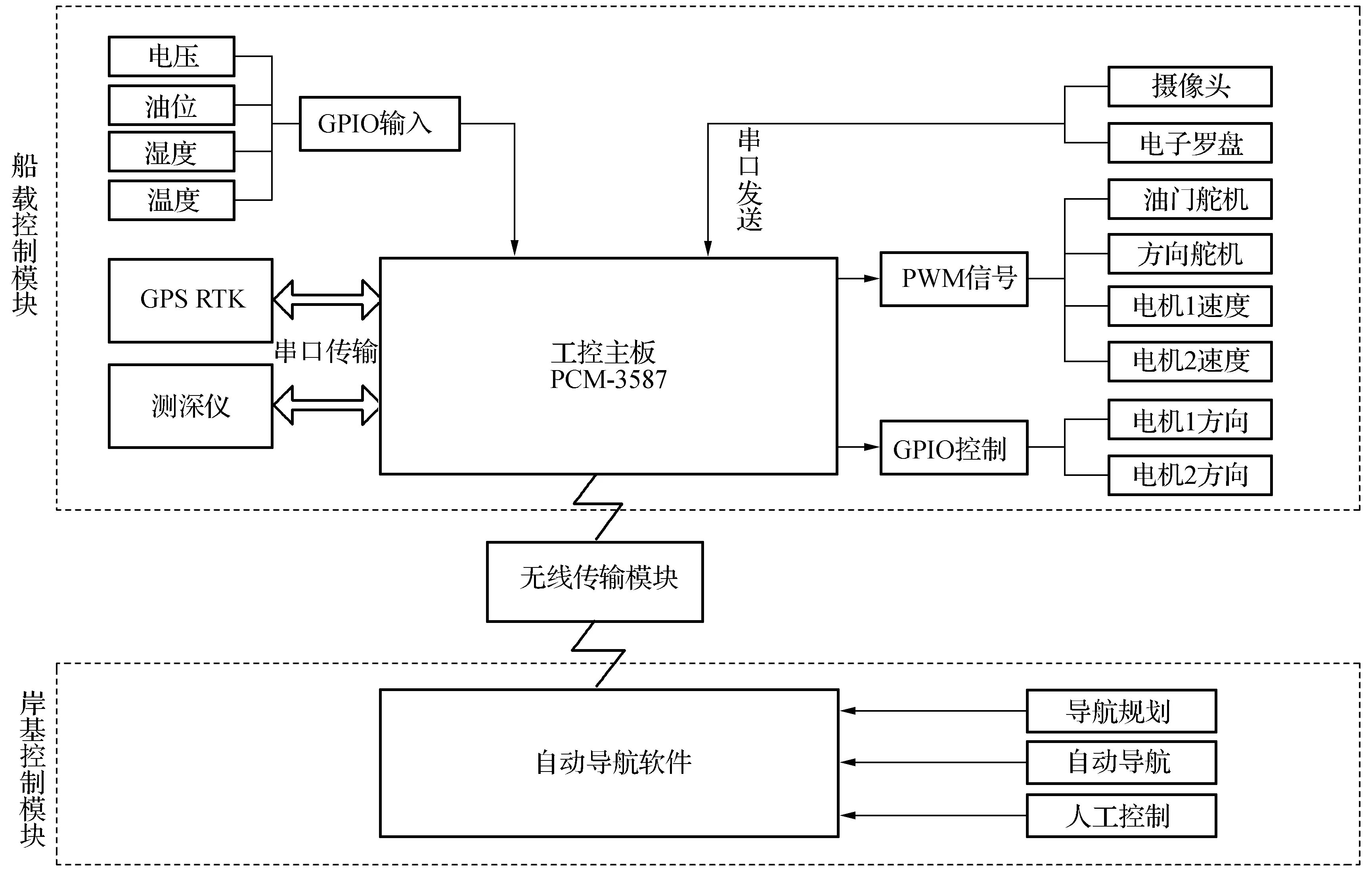
图2 系统组成
2.1 船载控制模块
船载控制模块为基于工控主板的数据传输和船体控制单元。经过大量的试验对比,一般单片机在湿度较大等恶劣环境及长时间的运行过程中,容易出现不稳定的情况,且难以满足功能扩展便利性的需求。因此,该模块选用尺寸紧凑的嵌入式工控主板,主要功能为测量数据采集传输和船体检测及控制。经过板载程序设计开发,已经能够满足数据采集、船体动作控制及双动力系统的切换。
2.1.1 嵌入式主板
船载控制模块选用PCM-3587工控主板。该主板是一款性价比高、尺寸紧凑的嵌入式控制模块。在PC104规格的板子上实现了工业计算机所需要的功能,整合了南北桥、串/并口、高速USB2.0等。板载PC/104接口为16位ISA总线扩充连接器,可用来连接专用的PC/104模块。由于船载控制模块需要多串口接收测量数据和船体状态信号,利用PC/104接口连接串口扩展模块连接仪器来实现数据采集。主板集成了16路PWM输出(与GPIO复用),通过编制信号控制舵机和电动机。
2.1.2 测量数据采集
测深仪和GPS RTK同步采集点位坐标和水深,通过串口传输给工控主板,工控主板通过数据处理和编制新的数据格式后无线传输给岸基控制端。GPS RTK实时定位精度可以达到厘米级,测深仪采集精度也可以达到厘米级,可以满足水下地形测量的需求。在测量的过程中,时间的同步性至关重要。本系统采用串口连接仪器,通过工控主板控制仪器数据的接收,能真正实现自动化测量的目的,且不依赖于单个仪器,同时也能保证时间的基本同步性,相比于利用记录时间等作为参考,数据后处理过程也将会大大简化。GPS的采样间隔也可以通过串口指令进行设置,以满足不同环境条件下的测量要求。综上所述,利用串口实现数据同步采集和传输,能很大程度减少人工操作和数据处理。
在接收测量数据和船体信息时需要用到多个串口,因此需要利用多线程串口通讯技术。在主板预装嵌入式操作系统的前提下利用基于API函数的CSerialPort类能实现多线程串口通讯,相比于直接利用API函数可以节约编程的工作量和对串口的底层控制,特别是针对多线程多串口的编程易于实现,从而可以提高编程效率。向串口发送数据可直接操作WriteToPort函数,本模块需要定时向岸基控制模块发送数据,通过定时器设置发送间隔即可实现。串口接收数据具体流程如图3所示。串口监听线程通过事件获取函数得到串口事件,以消息方式通知主程序,激发消息处理函数来进行数据处理。
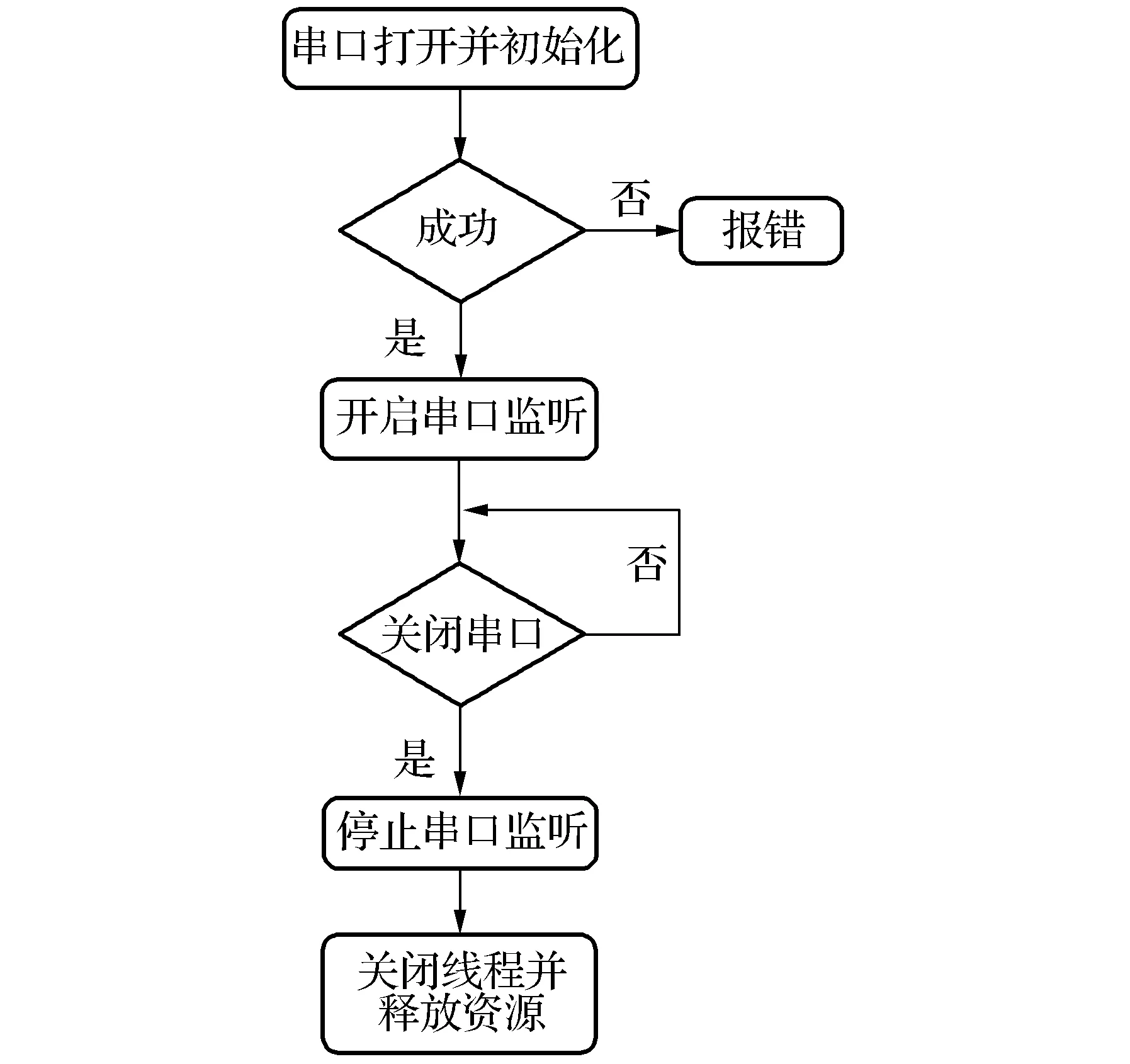
图3 串口接收数据流程
2.1.3 船体状态
船体状态包括船载摄像头、电子罗盘和GPIO输入信号,如图2所示。电子罗盘获取当前船体航行的航向传输给工控主板,为自动导航提供信息。GPIO输入可以获取当前船体的状态信息。当遇到紧急情况时,如汽油油位偏低,岸基控制模块可以通过GPIO信号得知当前船体的状态,发送返回指令。相比于以往的遥控测量船,本系统加入视频传输系统,且视频传输系统是一套独立的系统。视频系统可以远距离传送船体周围的实际状况,通过此功能该遥控测量船在其他领域也能得到应用,例如,可以利用该遥控测量船远距离观察危险水域及人类了解甚少的水域地带周围的详细信息。
2.1.4 船体控制
船体控制包括汽油机的方向舵机、油门舵机以及电动机控制。操作人员根据船体的状态利用岸基控制模块发送控制信息到工控主板,工控主板控制船体动作,包括电机、油门舵机及方向舵机。当汽油机工作时,主要控制方向舵机和油门舵机,当汽油机出现故障,启动电动机继续航行。相比于以往产品的电力驱动遥控测量船,汽油机驱动动力更强劲,可以主动控制油门大小。在波浪和风力比较大的情况下,操作人员可以设置合适的油门大小来达到合适的速度以满足水下地形测量的要求。
方向舵机和油门舵机通过调制PWM(Pulse-Width Modulation)信号控制。PWM即脉冲宽度调制,具有控制简单、灵活和动态响应好等优点,被广泛应用于测量、通信、功率控制与变换等领域。在本模块舵机控制中,PWM信号周期是20 ms,0°~180°的转角对应的正脉冲宽度是0.5~2.5 ms,其中1.5 ms对应舵机为90°时情况。
2.2 岸基控制模块
岸基控制模块为自动导航软件,当无CORS站时还需要架设GPS基准站。软件通过无线模块接收测量数据和船体状态信息。操作人员根据接收的信息通过软件发送远程控制信号对遥控测量船进行远程控制。软件功能模块分为导航规划、自动导航和人工控制。
2.2.1 导航规划
自动导航软件根据测量的水域范围和测量的需要预设测量线。在预先得知测量范围的坐标的情况下,人工设置航距和航线。规划导航线是自动导航的前提,通过预设导航线,数据采集的密度更加均匀,且在不同区域根据不同的需要可以采取不同的航距和采集密度,后期的质量控制更能够得到保障。
2.2.2 自动导航
自动导航软件实时接收来自船体的定位信息,根据预设的导航线经过实时处理和快速解算得出偏离预设航线的距离。通过不断检测船只坐标与路线的偏离状况,实时发出指令,即时调整测量船前进方向,实现自动导航的目的。该模块还包括坐标转换功能,当接收到的坐标不是本地坐标系时需要转换到本地坐标系下。根据当地已知的坐标点计算相应的转换参数,将实时接收的坐标转换到当地坐标系下。相比于人工控制导航,自动导航系统能减少操作人员的复杂操作,真正实现测量数据采集的自动化和智能化。
2.2.3 人工控制
人工控制是指在船体自动导航的同时,操作人员可以对船体动作外加控制。人工控制包括油门控制、舵机控制、电机控制等,可以实现遥控测量船的加速、减速、倒退和转向。当出现紧急情况时,可以控制船体偏离航线运行,当油位状态较低发出警报时,可以发出返回指令。软件可以根据航行的路线计算最佳返回路径完成自动返回任务。人工控制模块增加了遥控测量船的应急能力,面对各种突发状况时可以及时返回。
2.3 系统应用
通过船载控制系统和岸基控制系统的开发集成,完成便携式水域测量系统的研制,经过多次调试改进,能够顺利完成水下地形测量任务与自动导航功能。便携式水域测量系统将进一步满足中小型水库、枯水期浅水道测量、乱水区大比例航道测量、狭窄水域整治、填挖方工程中自动化水深采集的需求,提高施工测量中水下地形自动化采集的效率。
3 结束语
本文的便携式水域测量系统通过全新的设计和多项技术的集成,能够完成水下地形自动测量的目的。全新的船体设计体积减小,满足了便携的需求。相比于传统的电力驱动,双动力驱动大大提高了系统的稳定性和可靠性,同时增加了续航时间,为野外工作提供了保障。便携式水域测量系统的推广,将会大大提高特殊水域水下地形测量的效率,不断满足水下地形测量的社会需求。
[1]刘仁杰,姚星周.Windows 环境下多线程多串口通讯的实现[J].工业控制计算机,2011,24(5): 32-33.
[2]吴元芝,杨传华,林晨光,等.设计航速下无人遥控测量船主机功率计算及选型[J].南京工程学院学报: 自然科学版,2012,10(2): 56-58.
[3]李征航,黄劲松.GPS 测量与数据处理[M].武汉:武汉大学出版社,2005.
[4]黄雪梅,范强,魏修亭.舵机控制用 PWM 信号的研究与实现[J].微计算机信息,2010 (5): 28-30.
[5]林旭波,丁继胜,唐秋华.基于GPS高精度定位的便携遥控水上测量船技术研究及集成[J].测绘通报,2012(S1):706-708.
[6]曹明,赵传虎.基于CORS的机动水位自动监测和遥报系统[J].交通科技与经济,2014,16(4):100-104.
[7]程剑刚.网络RTK联合声波测深仪在水下地形测量中的应用[J].测绘工程,2014,23(3):63-65.
[8]闫永辉,徐建新,吴文强,等.GPS-PPK 结合测深仪在水下地形测量中的应用[J].人民黄河,2013 (5): 128-130.
[9]姜仁辉,佰春明.GPS 结合测深仪在水下地形测量中的应用[J].甘肃水利水电技术,2011,47(12): 43-44.
[10]王建忠,王玉龙.多波束与RTK三维水深测量技术的联合应用[J].测绘工程,2014,23(4):65-68.
[11]万紫,刘江,徐庆华,等.基于多源空间数据的河道水城变化监测方法研究[J].测绘工程,2014,23(5):37-41.
[12]赵珞成.GPS输出的NMEA0183信号的时间特性分析[J].海洋测绘,2002,22(3): 19-21.
[13]周建郑,杨中利.GPS实时动态测量在故县水库水下地形测量中的应用[J].海洋测绘,2002,22(3): 32-34.
[14]高斌,吴向阳,刘娟.GPS 在水下地形测量工程中的应用[J].测绘科学,2009,34(S2):149-150.
[15]高成发,赵毅.差分 GPS 水深测量系统在港口工程中的应用[J].测绘工程,2004,13(4): 16-19.
[16]史建青,焦明连,董春来.信标 GPS 定位信号与测深仪水声信号的融合技术研究[J].测绘工程,2011,20(2): 18-20.
[责任编辑:刘文霞]
The portable survey system of the water region based on embedded system
WANG Xue, YUE Jian-ping, NING Zhen-guo, ZHOU Hang-yu
(School of Earth Sciences and Engineering, Hohai University, Nanjing 210098, China)
Based on bathymetric surveying principle, through the development of new design and the system supported by double power, and by use of GPS RTK and sounder, the remote control survey boat is developed. Through the development of embedded shipboard control module and shore-based control module, the data collection and automatic navigation of the remote control survey boat are realized.
remote survey boat; embedded; GPS RTK; echosounder; automatic navigation
2013-12-31;补充更新日期:2014-10-12
王 雪(1990-),男,硕士研究生.
P228
:A
:1006-7949(2014)12-0067-04
