地面三维激光扫描点云数据精度影响因素及控制措施
2014-08-25曹先革张随甲司海燕孟祥来
曹先革,张随甲,司海燕,孟祥来,刘 妍
(1.黑龙江工程学院 测绘工程学院,黑龙江 哈尔滨 150050; 2.武警黄金第三支队,黑龙江 哈尔滨 150069)
地面三维激光扫描点云数据精度影响因素及控制措施
曹先革1,张随甲2,司海燕1,孟祥来1,刘 妍1
(1.黑龙江工程学院 测绘工程学院,黑龙江 哈尔滨 150050; 2.武警黄金第三支队,黑龙江 哈尔滨 150069)
地面三维激光扫描技术虽然具有分辨率高、准确度高、效率高等特点,但在应用过程中存在一系列影响三维激光扫描精度的因素。文中详细分析扫描距离、物体表面材质、控制网、标靶测量精度、光斑大小、扫描点间距、点云拼接精度、全反射物质和外界环境等因素对三维激光扫描精度的影响,并提出对以上影响因素的控制方法。
地面三维激光;点云;误差;光斑;拼接
三维激光扫描技术又称为实景复制技术,作为继GPS之后的又一项技术革新,具有非接触式测量、能够直接获得物体表面三维信息、测距范围广(一般在1~1 000 m)、采样精度高(达毫米级)等特点[1-2],使得三维激光扫描技术在工程测量、古建筑和文物保护、数字城市、逆向工程等领域得到了广泛应用[3]。
在扫描过程中,不同工程对三维激光扫描仪的精度和相应指标都有严格的要求,影响点云精度的因素及各因素对工程的影响是扫描作业过程中需要注意的问题。本文主要分析探讨影响点云数据精度的各种因素及控制各影响因素的方法。
1 地面三维激光扫描系统简介
1.1 工作原理
地面三维激光扫描系统采用非接触式高速激光测量方式获得物体表面三维点云信息。目前,地面三维激光扫描系统有相位测量法、时间差测量法和三角测量法3种扫描方式[4]。
相位测量法是根据相位差计算距离,测距精度可达毫米级。目前主要有调频连续波法、类调频连续波法和调幅连续波法3种。
时间差测量法是根据激光脉冲从发射到被接收的飞行时间,由光速C,时间t算出扫描仪与物体之间的距离。时间差测量法的精度随距离的增加而降低。
三角测量法是根据物体表面位置变化时,其反射激光在扫描仪检测器上成像也随之变化,通过像移和实际位移的关系推算真实的物体位移[4]。
1.2 工作流程
地面三维激光扫描仪外业工作流程如图1所示。
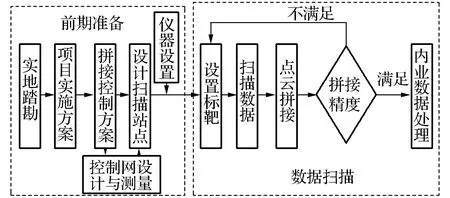
图1 三维激光扫描工作流程
2 影响地面三维激光扫描精度的因素及误差分析
三维扫描仪在扫描过程中点云数据精度的影响因素来自多方面,主要有扫描距离、物体表面材质、控制网、标靶测量精度、光斑大小、扫描点间距、点云拼接精度、全反射物质、外界环境等。
2.1 扫描距离和物体表面材质对点云的影响及控制方法
地面三维激光扫描仪测量距离的远近与激光强度和物体的反射率有关,对于特定的扫描仪,其发射的激光强度是不可变的,这样即使两个具有不同反射率的物体处于相同位置处,也会导致量测距离的不同。图2所示是LMS三维激光扫描系统扫描距离与反射率之间的关系,表1所示是部分材料的反射率[5]。控制方法如下:

图2 LMS系统测量距离与反射率的关系
1)安置扫描仪测站时尽量缩短三维激光扫描仪到低反射率物体之间的距离。
2)外业扫描时,扫描仪至被扫描物体之间的距离尽量保持在50 m以内,如果不同测站之间距离过长,可以考虑用增加测站的方式来减少扫描仪至被扫描物体之间的距离[1]。
3)使设定的扫描主距以内点云采样间隔符合技术要求。

表1 部分材质的反射率
2.2 控制网及标靶测量对测量精度的影响及其控制方法
外业点云数据的拼接有多种方式,如果选择通过布设控制网测量标靶坐标的方式进行拼接,根据“高级控制低级”的原则,则需要标靶位置的量测精度等级高于点云拼接的精度等级。如果标靶位置测量的精度达不到项目对精度的要求,则会导致点云数据质量的降低。而标靶测量的精度一般受控制网精度、仪器精度、棱镜反光、数据平差方法、标靶类型等因素的影响。控制方法如下:
1) 选择2″或2″以上的全站仪进行控制网布设,标靶测量采用免棱镜方式测量。
2) 用满足精度要求的相应等级水准方法测量控制点的高程值。
3)根据扫描项目对点云精度的要求,选择合适的控制网等级进行平面位置测量。
4)平面和高程控制网的平差优先选择整网平差的计算方法。
5)为提高点云拼接精度,建议采用球形标靶进行拼接,其次选择磁性标靶和其它标靶。
2.3 光斑直径和点云采样间距的影响及其控制方法
地面三维激光扫描系统发射的激光光斑因光线的发散性,会随着距离的增加不断放大。如果被测物体距扫描仪比较远,扫描激光光斑就会变大,进而影响点云数据的测量精度;同时,在这种情况下同样一个激光斑点照射在两个不同的物体(如物体远近不同或反射率相差大)的可能性大,如图3所示,此时会导致三维扫描仪测量距离的无效性;而且随着被测物体距离的增加,相邻两个测量点的间距也会增大[5]。图4显示了三维激光扫描系统工作时,光斑直径和扫描点间距随距离变化情况。控制方法如下:
1)三维激光扫描系统在设计时尽可能减小发射和接收光束的张角。
2)减少三维激光扫描系统和被扫描目标物体之间的距离。

图3 距离误差示意图

图4 光斑直径和光斑间距与距离的关系
2.4 点云拼接对测量精度的影响及其控制方法
点云数据的拼接有多种方式,如果通过标靶拼接相邻测站的点云,则数据的拼接质量因受标靶距离测站的远近、扫描时工作人员的素质、扫描时标靶与激光束的夹角等因素的影响将会有所不同。如果采用相互通视的标靶进行拼接,则对点云拼接精度影响最小;如果采用球形标靶进行拼接,则拟合球体的精度对点云数据的拼接质量有较大影响;如果根据同名特征点拼接点云数据,则点云数据的扫描精度对拼接质量有较大影响,同时拼接质量还受其它一系列因素的影响,如被扫描物体距测站的远近、材料反射率、点云采样间隔和扫描作业人员的业务水平等。控制方法如下:
1)点云数据拼接方法应优先选择标靶拼接,其次选择同名特征点拼接,其中利用相互通视标靶拼接的精度高于结合控制网的标靶拼接。
2)如果采用拟合球形标靶进行拼接,应首先滤除球形标靶点云数据的噪声。
3)外业扫描时,应根据现场情况均匀布设标靶,并且标靶距离扫描仪不要超过50 m。
4)点云数据拼接时可以组合使用各拼接方式。
2.5 全反射物质的影响及控制方法
在外业扫描过程中由于阳光的影响,会导致激光传感器错误读取数据;在扫描过程中如果遇到玻璃或其它具有全反射性质的材料时,仪器发射的激光不能被返回,此时三维扫描仪会错误计算到此类物体的距离;另外,当与激光具有相同频率的光线被扫描仪传感器接收时会影响仪器对反射光的处理,进而导致测量结果有误差。其次,如果空气质量较差,也会影响激光回波信号。控制方法如下:
1)作业时为扫描仪安装遮光装置,减少阳光等外界因素的干扰。
2)在数据预处理中通过滤波算法进行去噪处理。
3)尽量使激光光束垂直入射。
2.6 外界环境对测量精度的影响及其控制方法
三维激光扫描仪工作时对外界温度具有一定的要求,低温或者高温都影响扫描仪电子器件及机械部件的使用性能。如果外界温度过低,三维扫描仪自检频率会增多,自检时间也会变长;外界温度过低亦会影响三维扫描仪的扫描精度和速度及电池的性能。其次,由于采用可见光的测量模式,三维激光扫描仪在特殊天气下作业时,如雨雪等天气,点云数据的噪声会呈几何倍数放大,这样会导致点云精度的降低,同时对仪器的使用性能也有较大影响。控制方法如下:
1)根据任务工作量合理安排扫描时间,避开高温或低温时段。
2)避免雨、雪、沙尘暴等天气下使用三维扫描仪。
3 提高三维激光扫描点云数据精度的方法和途径
从地面三维激光扫描仪的工作原理和点云数据精度影响因素的分析可以看出,三维激光扫描技术的核心原理就是激光测距。三维激光扫描是一个不断重复的数据采集和处理的过程,在该过程中可以通过以下方法和途径提高三维激光扫描点云数据精度:
1)在扫描前进行现场踏勘,调查清楚扫描现场影响扫描精度的外界因素,如低反射率目标位置,全反射物质所处方位,并绘制位置示意图。
2)对于较大范围的扫描工作,在保证数据不缺失同时避免数据冗余的前提下,合理设置扫描测站位置,并根据踏勘示意图绘制测站分布工作草图。
3)扫描时在测站分布工作草图上绘制标靶分布图,内业数据拼接时根据标靶分布图优先选择利用相互通视的标靶拼接点云,其次选择同名点的拼接方式。
4)在完成每测站扫描任务前对点云数据进行初步检查,发现数据缺失或噪声过大时需采取相应补救措施。
5)扫描时根据工作对精度的需要设置扫描参数,并且扫描时优先选用球形标靶,其次选择其它类型的标靶。
6)如果选择通过布设控制网测量标靶坐标的方式进行拼接,控制网的平面和高程测量精度等级应高于点云拼接的精度等级,并且标靶的位置采用免棱镜方式测量。
7)根据工作量和天气等因素合理安排外业扫描时间。
4 结束语
虽然地面三维激光扫描仪凭借其高分辨率、高准确度、高效率等特点,在三维重建、虚拟现实、数字地球和数字城市等领域得到了广泛的应用,但在实际应用过程中存在一系列影响点云精度的因素。为了提高点云数据的质量,在实际扫描过程中可根据本文对每种影响因素的分析和控制方法及提高点云数据精度的方法和途径,从现场踏勘、扫描测站设置、标靶测量及拼接和外界影响因素调查等方面下手,合理设计工作方案,尽量避免在扫描过程中外界因素的干扰,切实提高点云数据质量。
[1]李海泉,杨晓锋,赵彦刚.地面三维激光扫描测量精度的影响因素和控制方法[J].测绘标准化,2011,27(1):29-31.
[2]梁振华,王晨,谢宏全.基于徕卡C10获取校园三维点云数据设计[J].测绘工程,2013,22(1):47-50.
[3]刘春,张蕴灵,吴杭彬.地面三维激光扫描仪的检校与精度评估[J].工程勘察,2009(11):5-60.
[4]刘佳.三维激光全景扫描系统误差分析及相机标定[D].北京:首都师范大学,2009.
[5]纪勇,齐建伟.三维激光扫描测量采样要素关系研究[J].黄河水利职业技术学院学报,2012,24(1):44-46.
[责任编辑:刘文霞]
The influence factors and control measures on point cloud data precision of ground three-dimensional laser scanning
CAO Xian-ge1, ZHANG Sui-jia2, SI Hai-yan1, MENG Xiang-lai1, LIU Yan1
(1.College of Surveying and Mapping Engineering,Heilongjiang Institute of Technology,Harbin 150050,China; 2.Wujing Golden Third Group, Harbin 150069, China)
The ground three-dimensional laser scanning technology has the characters of high resolution, high accuracy, high efficiency, etc, but there are series of factors in the application process, which affect the precision of three-dimensional laser scanning. Analysis is made on the influence of scanning distance, material surface, measurement precision of control network and the target, spot size and scanning point spacing, point cloud splicing precision, total reflection material and external environment on precision of three-dimensional laser scanning, and the control methods based on the above factors are proposed.
ground three-dimensional laser;point cloud; error; spot; splicing
2014-02-09
黑龙江省普通高等学校青年学术骨干支持计划项目(1252G052);黑龙江省普通高校重点实验室空间地理信息综合实验室开放课题(KJKF-13-06);黑龙江工程学院博士科研基金项目(2012BJ03)
曹先革(1979-),男,副教授,博士.
P217
:A
:1006-7949(2014)12-0005-03
