基于磁流变弹性体的电梯减振系统研究
2014-08-16郑祥盘郭源帆陈淑梅
郑祥盘,郭源帆,陈淑梅
(1.福州大学 机械工程及自动化学院,福建 福州 350116;2.福建省特种设备检验研究院,福建 福州 350008)
0 引言
电梯启动、运行及停车时,电梯产生振动不仅会影响乘客乘坐电梯安全性、舒适性,振动传递产生噪声还会恶化生活环境。
目前,在电梯减振结构的振动隔离与控制中,常用的隔振装置主要为被动式隔振器。被动式隔振器由于采用普通橡胶或金属弹簧作为阻尼元件,完全没有调节能力,有一定的局限性。而主动式隔振器一般结构复杂、需消耗大量的能源,因而限制了它在工程实际中的应用。半主动控制综合了主动控制与被动控制的优点,即它既具有被动控制系统的可靠性,又具有主动控制系统的强适应性。而磁流变弹性体作为磁流变材料的一个新分支,既具有响应快、可逆性好、可控性好的优点,又克服了磁流变液沉降、稳定性差等缺点[1]。因此,将磁流变弹性体运用于主被动一体振动隔离与控制是极富研究价值的,在工程上是具有应用潜力的。近年来,已有人利用磁流变弹性体材料来实现结构的半主动隔振,但采用的结构式通常为剪切式受力,即磁流变弹性体材料受剪切力的作用,这种结构式存在承载力小的缺点,不宜用于大载荷微幅振动场合[2]。而本文设计的隔振系统正是将磁流变弹性体与半主动振动控制技术相结合,提供一种能适应重载微幅振动结构的主被动一体控制与振动隔离的挤压式磁流变弹性体隔振器,在电梯启动、运行及停车时起到良好的减振效果与抑制噪声传递作用。
1 磁流变弹性体的工作原理
磁流变弹性体是一种高分子聚合物中嵌有铁磁性颗粒的智能材料,在外磁场的作用下固化,使颗粒在基体中形成链状及柱状有序结构,这种有序结构导致材料的力学性能可控,因此可设计出由磁场控制的变刚度与变阻尼器件。目前,利用磁流变弹性体制备的缓冲减振器件都是基于以下两种工作模式进行设计的[3]。
剪切模式:如图1(a) 所示,磁流变弹性体粘置于两相对运动的极板之间,外加磁场经过极板垂直作用于两极板之间的磁流变弹性体,使磁流变弹性体的粘弹性能发生变化,从而使磁流变弹性体的剪切模量发生变化,达到利用外加磁场进行变刚度的目的。利用这种工作模式可设计开发弹性体缓冲器、吸振器以及汽车悬架套筒等磁流变器件。

图1 磁流变弹性体工作模式
拉压模式:如图1(b)所示,磁流变弹性体粘置于两相对运动的极板之间,磁流变弹性体受极板的拉压膨胀或压缩,外加磁场经过极板垂直作用于两极板之间的磁流变弹性体,使磁流变弹性体的粘弹性能发生变化,从而使磁流变弹性体的杨氏模量发生变化,达到改变弹性体对所受作用力的阻力的作用。目前国内外文献中未见利用这种工作模式设计开发的弹性体器件。但在这一工作模式下的磁流变弹性体隔振器具有非常强的非线性,其结构简单,可以承受较大的载荷,本文所研究设计的主被动一体磁流变弹性体隔振器就是基于这种挤压式工作模式进行的隔振器设计。
挤压式主被动一体磁流变弹性体隔振器,如图2所示。它的工作原理是:上线圈绕组6和下线圈绕组1通电后,在上导磁体7和下导磁体3间产生磁场,磁场作用于磁流变弹性体2上。通过固定于振动平台上的传感器10测到的被控对象5的振动信号经过电荷放大器放大后发送到控制单元模块12,控制单元模块12根据被控对象5的振动特性和隔振要求适时调节上线圈绕组6和下线圈绕组1中的电流大小,控制上导磁体7和下导磁体3之间的磁场强度,进而改变磁流变弹性体2的刚度和阻尼,这样就可控制磁流变弹性体2的功耗,从而达到所需的主被动一体隔振效果。
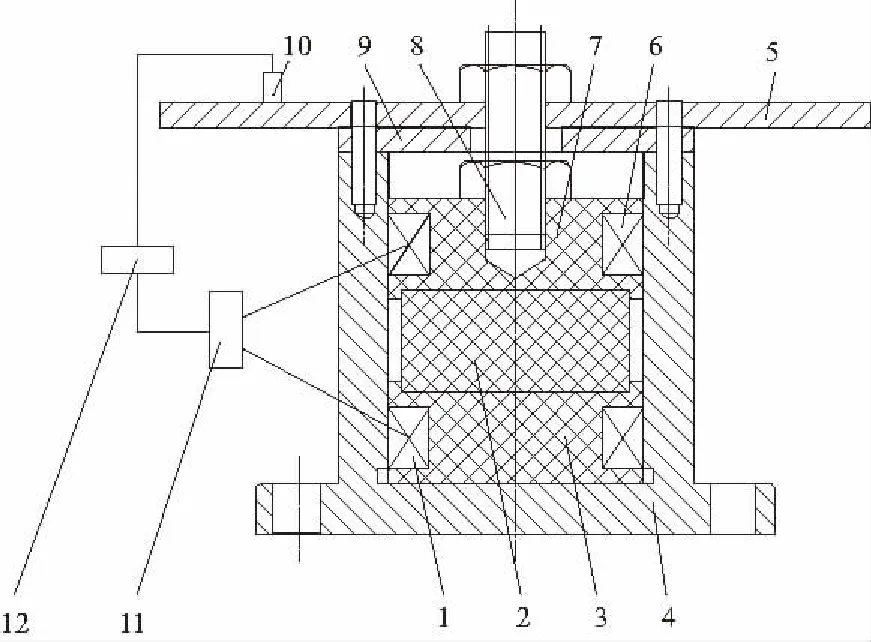
1—下线圈绕组;2—MRE;3—下导磁体;4—隔磁外筒;5—振动平台;6—上线圈绕组;7—上导磁体;8—螺杆;9—下盖板;10—传感器;11—电源;12—控制单元图2 挤压式磁流变弹性体隔振器工作原理图
由于磁流变弹性体2置于上导磁体7和下导磁体3之间,可承受电梯挤压载荷作用,大大提高了隔振器的承载能力;同时根据磁流变弹性体的移频特性,在大小不同的激振力产生不同的激振频率的情况下,使用具有一定灵敏度的控制系统随时测得振动平台的振动情况,根据不同的实时反馈情况做出不同的电流输出,形成磁感应强度不同的磁场,进而使磁流变弹性体的刚度和阻尼发生变化,即改变磁流变弹性体振动的固有频率,以使整个振动系统的振动幅度降到最小,最大限度的远离共振区域,最终达到系统要求的隔振效果。该隔振器的整个控制过程是一个典型的闭环控制过程,能够实现对被控对象实时自动控制。
2 挤压式磁流变弹性体隔振系统的设计
隔振器的作用一是支撑设备,二是衰减振动[4]。用于电梯减振系统设计的挤压式磁流变弹性体隔振器,通过使用新型智能材料-磁流变弹性体,提供支撑设备所需的刚度和阻尼,与电梯减振工作特性要求吻合。
2.1 磁流变弹性体隔振系统的总体设计
图3是主被动一体隔振系统的控制工作原理示意图,此系统可以分为两大部分:1) 为工作部分,通过磁流变弹性体的磁致效应以实现不同刚度和阻尼下的振动隔离;2) 部分为控制部分,通过传感器采集到的实时信号并经过放大等处理后,由控制主机按程序要求处理得到控制信号,再由功率放大器与直流稳压电源控制加在弹性体的磁场大小,以改变弹性体的刚度和阻尼,在电梯启动、运行、停止与紧急制停时起到良好的减振效果,不仅会提高乘客乘坐电梯安全性、舒适性,还减少振动传递产生噪声。

图3 主被动一体隔振系统结构示意图
2.2 磁流变弹性体电梯隔振系统的设计
2.2.1 弹性元件的选择
由于磁流变弹性体具有类似于橡胶的力学特性,且其综合力学性能比橡胶更好,主要表现为动态屈服应力随磁场强度的增加而增加,且这种变化是可逆的。通过对外加磁场强弱的控制,可在毫秒级的时间内改变弹性体的力学特性,如磁致弹性模量、磁致伸缩等。将这种特性用于电梯启动、运行及停车时减振中,通过一个外加可控磁场来改变磁流变弹性体的弹性模量和阻尼系数,就可以自动调节阻尼器的刚度和阻尼力,从而能够满足电梯启动、运行及停车时低频微幅振动实时控制的要求。基于以上对磁流变弹性体综合性能优点的考虑,所设计的挤压式主被动一体隔振器就选用磁流变弹性体作为弹性隔振元件。
2.2.2 磁流变弹性体的选择
作为一种新兴的智能材料,现在磁流变弹性体还没有统一的制备方法,而使用不同的工艺制成的材料在磁流变效应上的差距能达到几倍甚至几十倍,因此深入研究磁流变弹性体的原材料,制备工艺及其对材料性能的影响,对于用于电梯减振工况的这种材料的研制是非常重要的[5]。
磁流变弹性体在固化之前,基体呈液态或粘塑性体状态。此时的铁磁性颗粒悬浮于基体中,在各种外力的影响下运动并形成有序结构。而磁流变弹性体中有序结构对磁流变效应的影响非常大。通过分析铁磁性颗粒在液体中的受力情况,可以提出优化磁流变弹性体制备工艺的原则。而通过对于多种样品的研制,为工艺优化奠定了基础。从固化时是否加磁场方面考虑,磁流变弹性体的基本制备方法主要分为两种[5]。
1) 预结构化的磁流变弹性体:它主要是由流体状基体和铁磁性颗粒组成,混合物在交链固化的过程中需要施加外部磁场,由于此时基体尚未固化而呈液态或粘塑性体状态,铁磁性颗粒还可以移动,所以能利用磁流变效应(即铁磁性颗粒在磁场方向形成链或柱状聚集结构),使颗粒在橡胶基体中形成有序结构。混合物固化后,这种有序结构就保留在基体中。因此预结构化磁流变弹性体(又称有场下制备的磁流变弹性体)是一种各向异性的弹性体材料。
2) 非结构化的磁流变弹性体:它的特点在于基体固化过程中,不用施加外磁场,颗粒也不会沿磁场方向形成链或柱状结构。因此非结构化磁流变弹性体(又称无场下制备的磁流变弹性体)是一种各向同性的弹性体材料。无场制备磁流变弹性体的磁流变效应一般仅为有场下制备材料的一半以下。
无论是有场还是无场制备的磁流变弹性体,在施加外磁场后,颗粒之间的磁相互作用都将会改变材料本身的一些性质,因此它们的力学、电学诸性能可以由外加磁场来控制[5]。为了使磁流变弹性体获得更加明显的磁流变效应,提高整个隔振系统的灵敏度,该隔振系统采用在有磁场作用下制备的磁流变弹性体作为隔振弹性元件。
2.2.3 磁流变弹性体的尺寸设计
根据电梯现有减振垫,初选为圆柱体的磁流变弹性体。根据磁流变弹性体工作在挤压状态下,橡胶材料在拉伸或压缩载荷作用下,载荷与变形关系式非线性的,以受拉压的橡胶材料而言,只有在相对变形不超过15%的情况下,近似符合胡克定理。在工程中从橡胶元件的疲劳程度考虑,通常将其相对变形控制在<15%,所以在一般情况下,磁流变弹性体在拉伸与压缩时的变形与载荷关系,也可以近似地用式(1)表示:
(1)
橡胶材料的剪切弹性模数G,主要取决于橡胶材料的硬度,不因橡胶种类或成分的不同而有明显的变化,对于成分不同而硬度相同的橡胶,其G值之差不超过10%。在实用范围内,G和硬度的关系可用式(2)计算:
G=1.19e0.034HS
(2)
弹性模数E与剪切弹性模数G的关系:
E=3G
(3)
根据机械设计手册中,橡胶压缩弹簧的计算公式,可近似计算出变形,刚度等参数如:

(4)
(5)

先将弹性体设计为,设计尺寸直径为150mm,高为200mm的圆柱体。
经过上述公式校核,以预承载500N的载荷可得此尺寸的磁流变弹性体满足设计要求,同时使用多个承载500N载荷的磁流变弹性体也能满足电梯运行工况要求,同时使用多个承载500N载荷的磁流变弹性体也能满足电梯运行工况要求。
2.2.4 磁流变弹性体隔振器的结构建模
设计隔振器整个结构的设计方案是:将磁流变弹性体固联于圆柱形的上导磁体和下导磁体之间,上导磁体和下导磁体的外圆周表面上的凹槽内分别嵌有上线圈绕组和下线圈绕组,上导磁体的上部连接有螺栓连接杆;上导磁体、磁流变弹性体、下导磁体及螺栓连接杆的下部分均置于隔磁外筒内,隔磁外筒的上部设有盖板,螺栓连接杆的上部分从盖板上的通孔中伸出并与被控对象连接;隔磁外筒、盖板和连接杆均采用非导磁体材料制成。
将隔振器的主要零部件(上导磁体、下导磁体、隔磁外筒和盖板)使用UG绘图软件完成三维立体建模,然后从已做好的标准件零件库中调用螺钉和螺母等标准件组装成隔振器的整个装配图,后检查装配好的各个零部件之间是否有位置干涉。最终设计完成的用于电梯减振的隔振器结构图如图4所示。
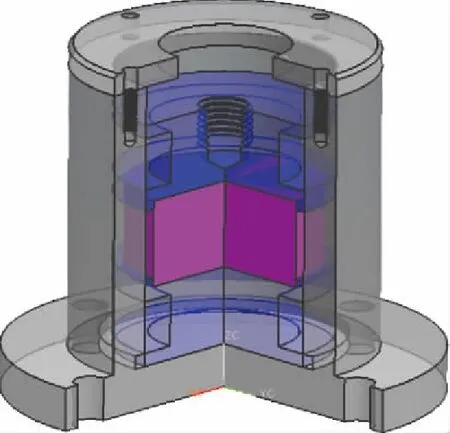
图4 磁流变弹性体隔振器结构图
3 挤压式磁流变弹性体隔振器的有限元分析
通过有限元分析软件ANSYS对磁流变弹性体减振器主要工作部件进行静力学分析,包括上下导磁体和弹性体,观察磁流变弹性体与上下导磁体在承受一定的载荷作用下发生的变形,以及上下导磁体和磁流变弹性体内部的应力和应变分布情况,以检验是否达到设计的要求[6]。
添加约束和载荷,分析减振器,应将下导磁的固定,即限制它所有的自由度,而仅在上导磁体的上表面只受到z方向上的力,此处暂设为500N。
分析要完成的结果主要是:上导磁体受到电梯载荷力的影响将力传递到磁流变弹性体与下导磁体,网格划分如图5在载荷的作用下,所产生的位移变化,应力和应变的分布云图以及分布密度云图如图6。通过查看这些分析结果,可对所设计的磁流变弹性体的结构和工作性能,有一个比较全面的了解,并针对分析结果产生的问题做出相应的改进措施。另外,由于设计的挤压式磁流变弹性体隔振器受到的是沿z轴方向的正压力,因此研究分析磁流变弹性体沿z轴方向的受力变形,对整个隔振器的工作精度的影响具有重要意义。
使用ANSYS软件在对磁流变弹性体进行静力学分析的过程中,就是只对其施加的z轴方向的压力载荷,其他方向附加载荷的影响忽略不计。对磁流变弹性体施加约束和载荷后的最后分析结果如图7与图8所示。
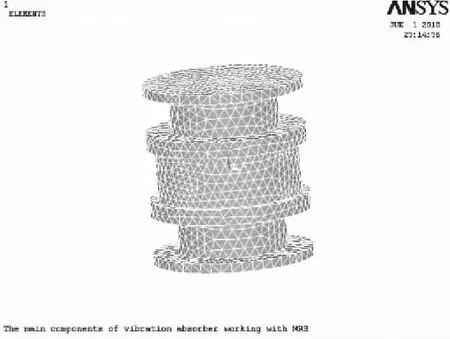
图5 网格划分图
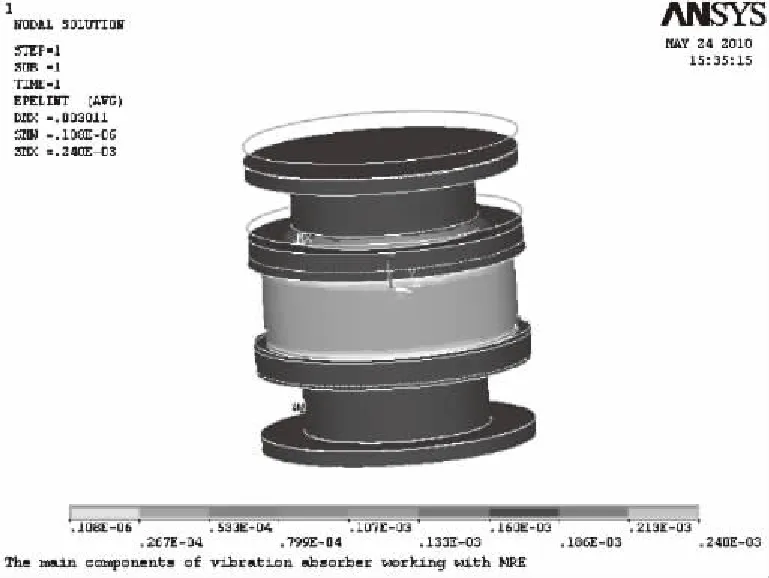
图6 应变云图
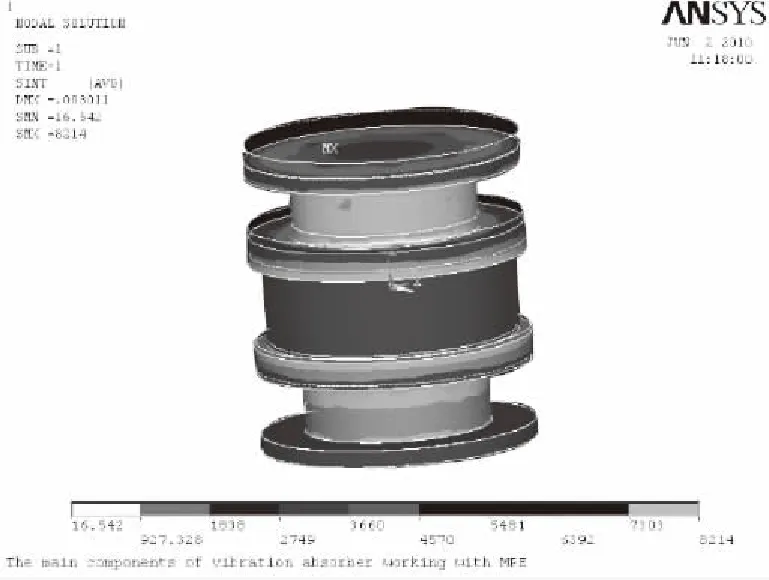
图7 应力云图

图8 MRE应力云图
图7与图8显示的分析结果可以看出,磁流变弹性体在承受电梯正压力500N载荷的作用下,它的下表面应力和应变都比较明显;沿径向分布来看,从磁流变弹性体的外部往里,应力和应变的变化基本相同,都是逐渐减小,呈现一定的变化规律。其中应力的分布有些不同,在磁流变弹性体下表面的边缘应力分布并不均匀,局部出现应力集中的现象,这与隔振器实际的工作状况——磁流变弹性体的应力分布情况比较相符。同时还可发现,磁流变弹性体的应力和应变基本上是成对称分布的,最大值匀出现在它与导磁体的接触位置,在这些地方容易出现应力集中的现象。
4 结论
磁流变弹性体是一种新型的智能材料,在许多控制领域受到了广泛关注。本文设计了用于电梯减振的一种基于挤压式工作模式的磁流变弹性体隔振器,对该隔振器的工作原理和结构设计进行了研究,并使用有限元分析软件对隔振器的工作性能进行了理论分析与优化设计,从而完成整个隔振器的参数设计所设计的挤压式隔振器以磁流变弹性体作为弹性元件,在电梯启动、运行及停车时起到良好的减振效果与抑制噪声传递作用,具有结构简单、承载能力大、能耗低和自适应主被动一体控制等优点,是振动工程的理想控制元件,具有非常广阔的发展前景。
[1] Deng H X,Gong X L,Zhang P Q.Tuned vibration absorber based on magnetorheological elastomers [J].Journal of Functional Materials, 2006, 37(5): 790-792.
[2] GinderJM,Nichols M E.Magnetorheological elastomers:properties and applications proceeding of SPIE[C].Bellingham: Int Soc Optical Engineering,1999,36(5):131-138.
[3] 汪建晓,孟光.磁流变弹性体研究进展[J].功能材料,2006,37(5):706-709.
[4] 周卓亮.可变刚度隔振器的研究[D].哈尔滨:哈尔滨工程大学,2006.
[5] 姚静静.高性能磁流变弹性体的研制[D].合肥:中国科学技术大学,2007.
[6] 龚曙光.ANSYS工程应用实例解析[M].北京:机械工业出版社,2003.
