基于LabVIEW的直流电机PID速度控制系统设计
2014-08-16沈峰钟胜奎仲兆准张运诗谢光伟
沈峰,钟胜奎,仲兆准 ,张运诗 谢光伟,
(苏州大学 a.机电工程学院;b.沙钢钢铁学院 江苏 苏州215021)
0 引言
直流电机是机械能和直流电能互相转换的旋转机械装置,直流电机具有较好的调速性能和较大的启动转矩,因此,对调速要求较高的生产机械(例如龙门刨床、镗床、轧钢机等)或者需要较大启动转矩的生产机械(例如起重机械、电力牵引设备等)往往采用直流电机来驱动。
随着计算机技术、大规模集成电路技术和通信技术的飞速发展,仪器技术领域发生了巨大的变化,出现了一种全新的仪器概念——虚拟仪器(Virtual Instrument);LabVIEW是美国国家仪器公司(简称NI)的创新软件产品,也是目前应用最广、发展最快、功能最强的图形化软件开发集成环境,又称为G语言,它把复杂、繁琐、费时的语言编程简化成用菜单或图标提示的方法选择功能,使用线条把各种功能连接起来的简单编程方式。
本文就是要运用LabVIEW来编写软件,通过友好的人机界面,实现对直流电机实际转速的测量,以及用PID控制算法对其转速进行控制,使之达到理想的控制效果。
1 系统组成及工作原理
实验系统由一台装有LabVIEW的计算机;NI ELVIS II+实验平台;额定电压12V、额定转速3500r/min的直流电机;以及一个集成光敏晶体管组成。ELVIS II+是基于LabVIEW编程环境,以及原型搭建的环境,实验硬件电路是在该平台上搭建的,该平台集成了-15V~+15V的可变电压源,+5V的直流电压源,以及多通道的数据采集(AI),两通道示波器,信号发生器等。集成光敏晶体管是用来测量电机实际转速的,接线如图1所示。
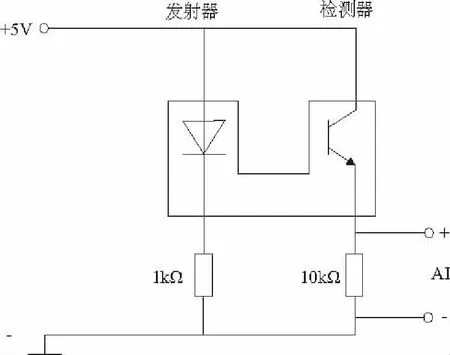
图1 光电器件电路原理图
将直流电机的一个引脚接可变电压源,另一个引脚接地,由于直流电机空载转速与控制电压近似成线性正比关系,故通过计算机控制直流电机引脚的电压的大小即可改变电机的转速,在电机的转轴顶端添加一个带一缺口的隔光圆片,将圆片放置在晶体管模块中间,当电机转动的时候,每转过一圈,光敏晶体管就可以接收到一次信号,AI通道就可以采集到一个脉冲,通过测量两个相邻脉冲的间隔时间,经过转换就可得到电机的实际转速,系统结构如图2所示。

图2 系统结构图
2 系统软件设计
系统编程采用美国NI公司的LabVIEW2010软件,该程序通常由前面板和程序框图组成。前面板是VI的人机界面,它通过各种控制器件和显示器件实现各类数据的输入和显示,模拟了真实仪器的面板,如图3所示;程序框图是程序员编写LabVIEW程序的窗口界面,如图4所示。

图3 前面板
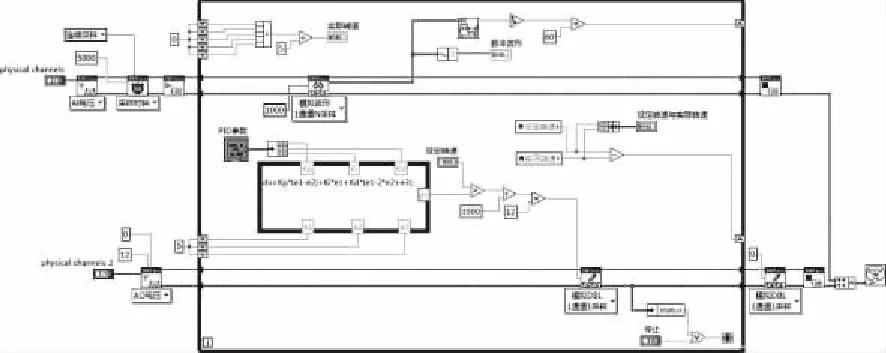
图4 程序框图
此程序主要分为三个模块,分别是:转速测量模块,PID算法模块以及转速控制模块。下面分别对三个模块进行介绍。
2.1 转速测量模块
该模块是要采集AI通道两端的脉冲信号,并将之转化成电机的实际转速,经过滤波显示出来。首先配置一个模拟电压输入通道,选择相应的物理通道,设置采样率,使用脉冲测量.vi计算脉冲周期,取周期的倒数,可得到每秒的转速,乘以60,可得每分钟的转速,最后用位移寄存器累加5次再除以5进行平均值滤波把最终结果显示在前面板上。
2.2 PID算法模块
程序采用增量式PID算式,如式(1):
Δv=Kp(ek-ek-1)+Kiek=Kd(ek-2ek-1+ek-2)
(1)
式中:Kp是比例系数;Ki是积分系数;Kd是微分系数;ek,ek-1,ek-2分别是第k次、第k-1次、第k-2次采样时设定转速与实际转速的差值;Δv是输出的速度增量。
程序用一个公式节点,以Kp,Ki,Kd,ek,ek-1,ek-2为输入量,Δv是经过PID算法计算得出的速度增量作为输出量控制电机转速,通过在前面板上输入适当的Kp,Ki,Kd值,使程序达到理想控制效果。
2.3 转速控制模块
该模块是将通过PID算法得出的速度增量经过转换,得到控制电压,控制电机转速。首先配置一个模拟电压输出通道,设定电压最大值为12V,最小值为0V,然后由于直流电机的转速与控制电压近似成线性正比关系,所以将Δv速度增量加上设定转速,除以额定转速3500r/min,再乘以额定电压12V,就可以得到控制电压,控制电机转速。
3 系统运行及调试结果
3.1 PID参数的整定
PID控制器参数的整定方法有很多,目前广泛运用的有三种:试凑法、经验数据法以及扩充临界比例度法。这里采用扩充临界比例度法对PID参数进行整定。首先选择一个足够短的采样周期T,调整Kp的值使之做纯比例控制,当系统出现临界振荡时记下此时的Kp为临界振荡增益Ks,以及临界振荡周期Ts;然后选择合适的控制度,所谓控制度,就是数字控制器和模拟调节器所对应的过渡过程的误差平方比;根据控制度查表1,即可求出Kp,Ti,Td的值;由式(2)、(3)可得到Kp,Ki,Kd的值。
Ki=KpT/Ti
(2)
Kd=KpTd/T
(3)
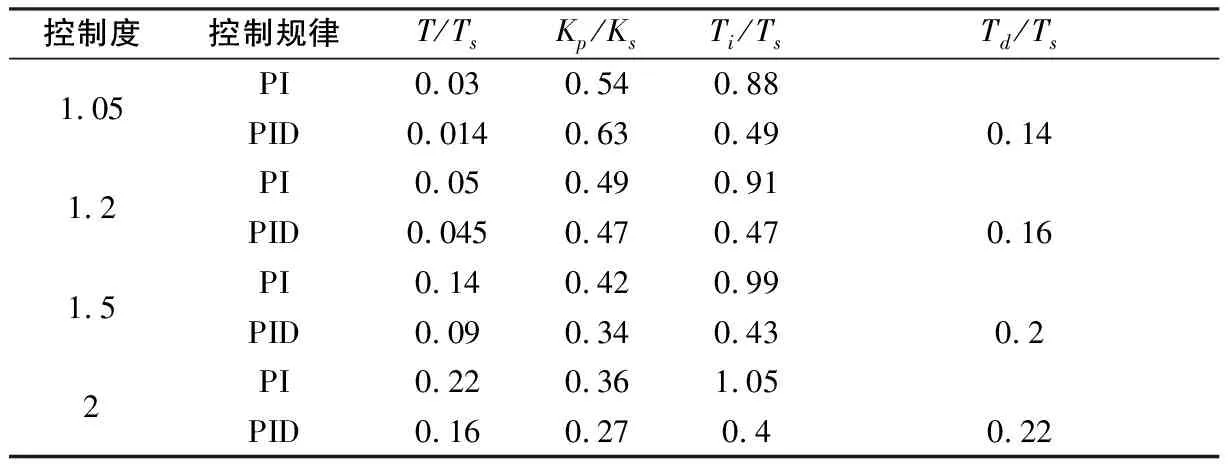
表1 扩充临界比例度法参数整定表
最后在前面板上输入正确的物理通道,PID参数,运行程序,调节仪表盘设定转速,观察实际转速的变化曲线,发现达到了速度控制的理想效果,实际运行结果如图5、6所示,参数设定如图7所示。
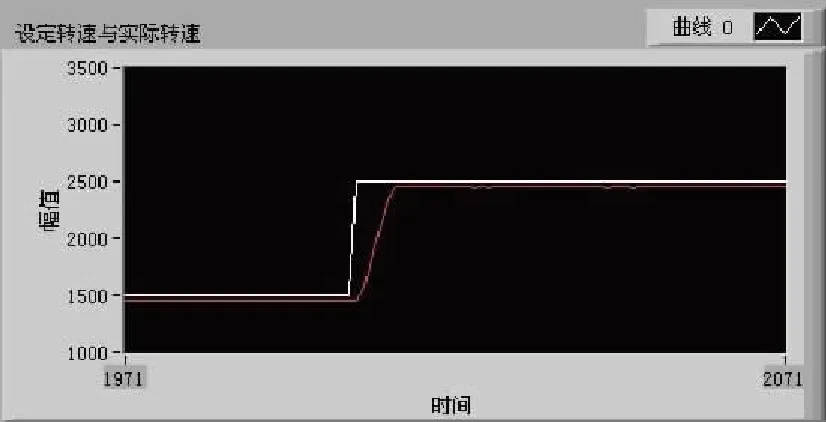
图5运行结果1
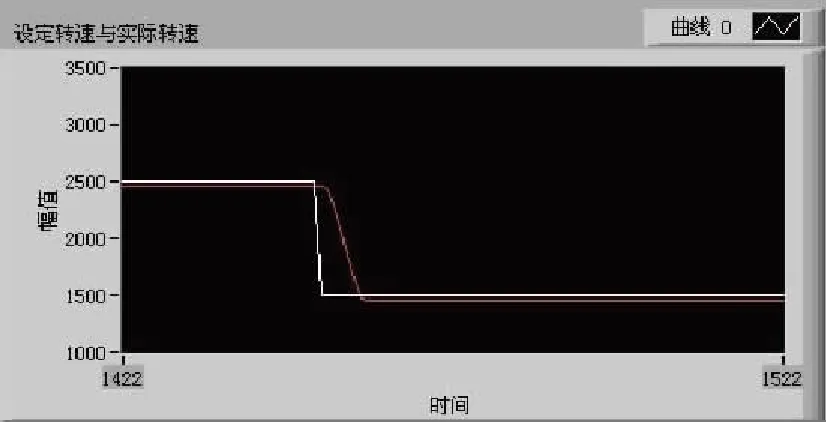
图6 运行结果2

图7 参数设定
4 结语
系统设计利用图形化编程语言LabVIEW实现了对直流电机的转速控制,实践证明,用PID算法控制电机转速,其结构简单,稳定性好,鲁棒性强,具有良好的控制效果;利用LabVIEW开发的控制系统,其人机界面友好形象,参数修改、系统调试方便,编程直观易用,降低了系统开发时间与项目筹建成本,提高了工作效率,因此具有一定的应用价值。
[1] 胡仁喜,高海宾.LabVIEW2010中文版虚拟仪器从入门到精通[M].北京:机械工业出版社,2012.
[2] 江建军,孙彪.LabVIEW程序设计教程[M].北京:电子工业出版社,2012.
[3] Ogata,K.现代控制工程[M].北京:电子工业出版社,2007.
[4] 秦曾煌.电工学上册[M].北京:高等教育出版社,2003.
[5] 金奇,邓志杰.PID控制原理及参数整定方法[J].重庆工学院学报,2008,22(5):91-94.
