基于MATLAB仿真的SVPWM技术研究
2014-08-16陈光明包达飞吴晨军
陈光明,包达飞,吴晨军
(1.南京农业大学 工学院,江苏 南京 210031;2.南京高腾数控技术有限公司,江苏 南京 211101)
0 引言
电压空间矢量控制是近年发展的一种比较新颖的控制方法。感应电机的矢量控制技术由德国的Blaschke等人在20世纪70年代率先提出[1],并经过多年的发展,该技术已经在交流调速系统的高性能调速领域中获得广泛的应用,并逐渐占据主导地位。
随着微电子技术、电力电子技术以及计算机控制技术的飞速发展,给矢量控制技术的研究奠定了物质基础[2]。近年来,电机的空间矢量控制被引入到逆变器及其控制中,形成和发展了SVPWM技术,本文从SVPWM的基本原理和概念出发,分析研究矢量控制算法和控制系统,并在MATLAB/Simulink环境下对控制系统进行建模仿真最后给出仿真结果。
1 SVPWM基本原理[3,4]
SVPWM的基本原理是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同的开关模式作合适的切换,从而形成PWM波,再以所形成的实际磁链矢量来追踪准确的磁链圆。
如图1为三相逆变器电路。逆变器三相桥臂共有6个开关管,其中上下两个开关管之间是互锁的,因此共有8个组合:U1(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)为非零矢量,U0(000)、U7(111)为零矢量。
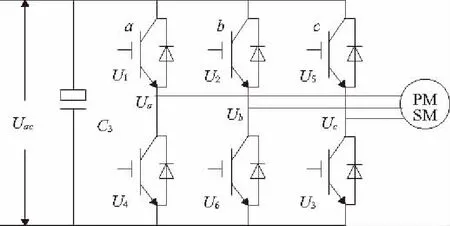
图1 三相逆变器电路
以上8个组合即为矢量控制的8个基本控制矢量,其中6个非零矢量其夹角互为60°,假设逆变器中直流母线电压为Udc,根据三相逆变器电路原理,可计算得出各开关状态与相电压和线电压的对应关系如表1所示,由此可以得到6个非零矢量组成一个正六边形,并把正六边形分割为6个扇区。图2为8个基本电压空间矢量的大小和位置。
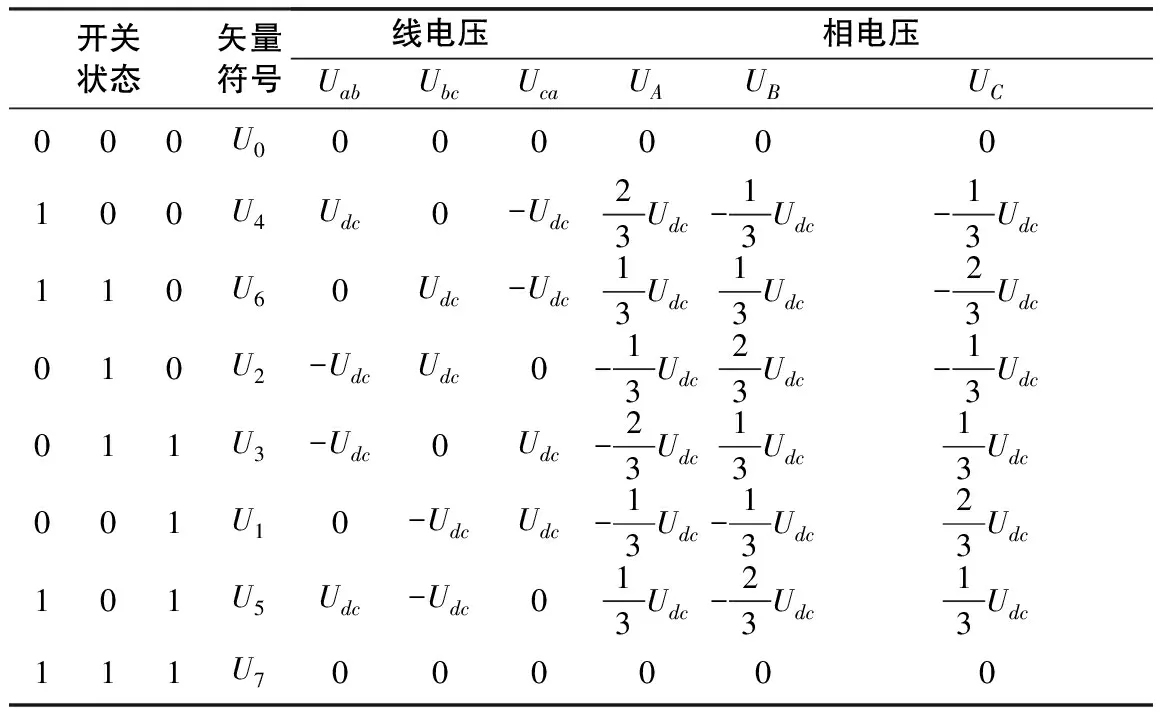
表1 开关状态与相电压和线电压的对应关系
在上述原理下,形成了正六边形的旋转磁通。而希望得到的理想圆形旋转磁通可以近似成有无穷条边的正多边形。可以利用6个非零的基本电压空间矢量和2个零矢量的线性时间组合来合成更多的电压空间矢量。即:
Uref×T=Ux×Tx+Uy×Ty+U0×T0
(1)
根据式(1)可知,在一个PWM周期T内,合成矢量Uref的作用效果和相邻的2个非零基本矢量以及零矢量分别作用Tx、Ty以及T0的效果一致。因此只要知道了基本矢量的作用时间Tk(k=0,1,2,3,4,5,6,),就可以计算出所需的脉冲宽度。
现以第Ⅲ扇区中合成电压向量Uref为例,如图3所示,根据式(1)可得:Uref×T=U4×T4+U6×T6。
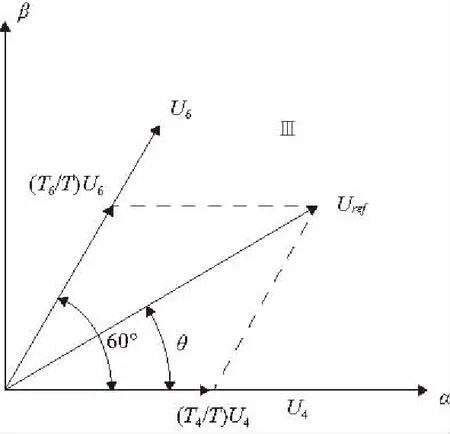
图3 电压空间向量在第Ⅲ区的合成与分解
在两相静止参考坐标系(α,β)中,令Uref和U4间的夹角是θ,由正弦定理可得:
(2)
因为|U4|=|U6|=2/3Udc,所以可以得到各矢量的状态保持时间为:
(3)

而零矢量所分配的时间为:
T0=T-T4-T6
(4)
得到各基本电压矢量的作用时间之后,就可以根据作用时间来调制波形产生实际的脉宽,可以选择适当的零矢量来最大限度减少开关次数,减少开关损耗。
2 SVPWM的算法实现[5]
SVPWM信号的实时调制,需要Uref二维静止坐标系α轴和β轴的分量Uα和Uβ以及PWM周期T作为输入。
2.1 判断合成矢量Uref所处扇区
2.2 计算作用时间


表2 Tx,Ty赋值表
2.3 计算矢量切换点


表3 切换点Tcm1,Tcm2,Tcm3赋值表
3 SVPWM的Simulink仿真[6]
根据以上的算法分析,在MATLAB/Simulink环境下建立SVPWM的变频器仿真模型如图4所示,主要由6个子模块组成。
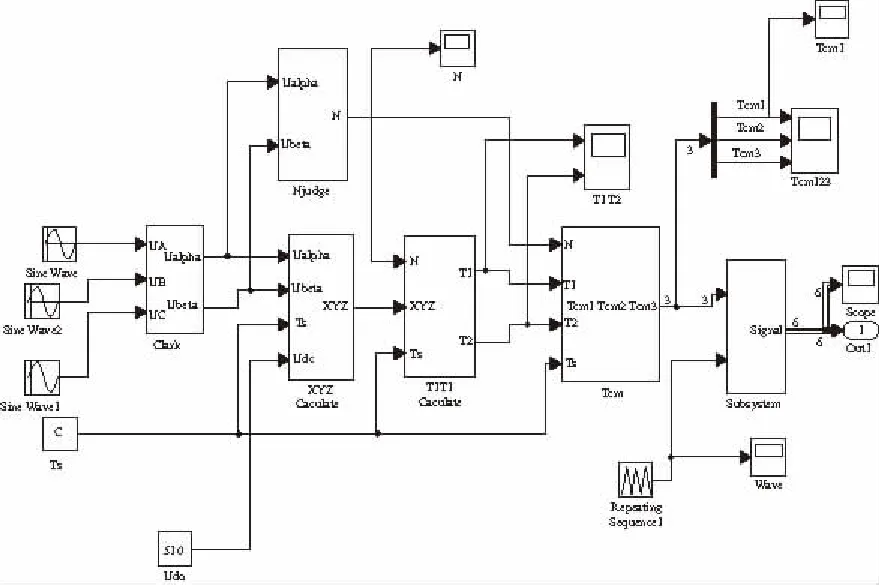
图4 SVPWM仿真模型
得到SVPWM模型的仿真结果,给出Uα和Tcm1的仿真波形如图5,图6所示。

图5 Uα仿真波形
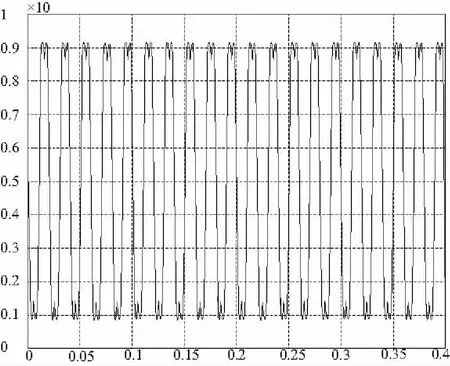
图6 Tcm1仿真波形
为了更好地验证SVPWM模型的正确性,结合一台交流异步电机,建立异步电机矢量控制系统如图7所示。选用的仿真电机参数为:380V、50Hz、2对极,Rs=0.435Ω,Lls=0.002Mh,Rr=0.816Ω,Llr=0.002mH,J=0.19kg·m2,逆变器直流电源510V。
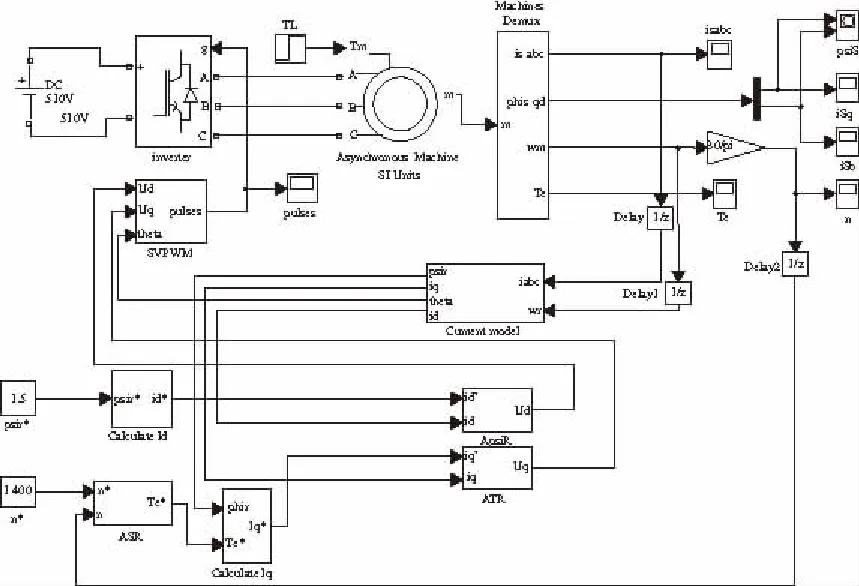
图7 异步电机矢量控制系统仿真模型
在给定转速为1400r/min,空载启动,在0.6s时加载55N·m,系统的仿真结果如图8,图9所示。

图8 输出转矩波形
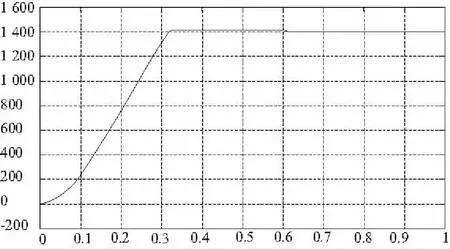
图9 转速响应
4 仿真结果分析
由仿真波形可以看出,在n=1400r/min的参考转速下,系统响应快速平稳。空载稳速运行时,忽略系统的摩擦转矩,此时电磁转矩均值为零;在t=0.6s突加负载,转速有一定下降,但又迅速恢复到平衡状态,稳态运行无静差。突加负载后,电磁转矩脉动稍有增大。仿真结果证明了本文所提出的SVPWM技术的合理性和有效性。
[1] 李华德.交流调速控制系统 [M].北京:电子工业出版社,2009,99.
[2] 李永东.交流电机数字控制系统 [M].北京:机械工业出版社,2002,178.
[3] 杨桂杰,孙力,崔乃政,等.空间矢量脉宽调制方法的研究 [J].中国电机工程学报,2001:21(05),80-83.
[4] Satoshi Ogasawara.A novel PWM scheme of voltage source inverters based on space vector theory [C].EPE Aachen 1989.1199-1202.
[5] 张润和,崔丽丽.基于MATLAB空间矢量脉宽调制方法 [J].辽宁工程技术大学学报,2004:(6),793-795.
[6] 洪乃刚.电力电子、电机控制系统的建模和仿真 [M].北京:机械工业出版社,2010.196-202.
