基于CPLD的超声测距系统设计
2014-08-12周金芝郑祥明
杨 明,周金芝,郑祥明
亳州师范高等专科学校理化系,安徽亳州,236800
基于CPLD的超声测距系统设计
杨 明,周金芝,郑祥明
亳州师范高等专科学校理化系,安徽亳州,236800
基于CPLD的超声测距系统已受到越来越多的关注,提出了一种更便捷的近距离测距方法,设计了以CPLD芯片为核心的超声测距系统,增设了温度测量电路、回波转换电路以消除温度及时间等造成的测量误差。该系统具有体积小、升级方便等优点。实验测试结果表明,该系统测距精度较高,能够满足工程上的需求。
超声波;CPLD;超声测距;报警功能
超声测距作为一种无损的非接触测量方法,在工业、勘探和定位等方面具有越来越多的应用,与激光、无线电等其他测距方法相比,它传统、实用、成本低、结构简单,在恶劣的环境中还具有一定的适应能力,而且不受外界电磁场、光等因素的影响。近年来,室内机器人与室内监控技术均已受到越来越多的关注[2],本文设计一种基于CPLD的超声测距系统,通过丰富的片内资源及较高的运行速度能够减少延时误差,提高测量精度。
1 超声波测距原理
一般情况下,人们采用双压电陶瓷晶片制成的压电超声波传感器测量距离。根据压电效应,当有大小与方向均不断变化的交流电压在压电陶瓷上加载时,压电陶瓷晶片会产生机械变形,通过共振产生超声波[1],超声波经由液体或固体表面反射,由相邻的传感器接收,测量计算发射接收时间t,便可利用公式求得被测点到测试点的距离s。
(1)
式中,C为超声波传播速度,单位为m/s,超声波在空气中传播的速度受到温度T的影响较大,超声波速度C与环境温度(℃)的关系式是:
(2)
超声波测距能力受到各种因素的影响,就测量距离而言,若距离较长,超声波传播损失相对增加,为此需要降低频率;但是抬升工作频率,可以提升传感器的方向性,对目标尺寸的细节容易辨识,可以提高物体表面测量精度;从传感器设计角度看,传感器尺寸和工作频率高低是成反比的,在要求低功率的情况下,传感器的尺寸越大,制造和安装越困难。本文选用适应于在空气中测量距离的40kHz的超声探头,提高了信噪比,避开了噪声,发射接收容易。
2 系统组成
针对微环境下的超声测距系统受到传播衰减及温度影响,本系统从硬件、软件综合考虑设计如图1所示的系统,该系统选择了UCM-T(R)40K1收发分体式传感器[6]。超声波发生器产生40kHz左右的脉冲,经调制后驱动发射电路、发射探头。接收电路设计了数码显示电路、报警电路、温度检测电路及控制器电路模块等。系统显示电路运用七段四位数码管,控制器模块选用EPM7128SLC84-15芯片。
2.1 超声波发射接收电路
超声波发生器[3]的输出u0应为40kHz左右的方波脉冲信号,选用555定时器构成的多谐振荡器产生方波,如图2所示,取Vcc= 5V,R1=100Ω,R2=15kΩ,C=1nF,测得输出频率为39.6kHz,占空比约为50%。超声波的发射是利用超声波发生器来完成的,为了提高输入到发射探头的电压及其功率,采用双电源互补对称功率放大电路。

图1 超声测距系统框图
超声波接收电路模块有前置放大电路、带通滤波电路及检测电路等。前置放大电路如图2所示,针对有用信号(如发射电路产生的40KHZ)的超声波信号进行放大,电压放大倍数的调节可通过调节R2和R3阻值来实现,通过平衡电阻Rp可以消除漂移对输出端的影响。在本设计系统中,取R2=2kΩ,R3=200 kΩ,Rp=2 kΩ,可将电压放大倍数设为100倍;带通滤波电路选用由TL082运算放大器和其外围电阻、电容等构成的带通滤波电路。在低频段系统,总噪声主要集中表现为50 Hz工频干扰以及室内环境噪声;在高频率段系统,总噪声主要表现为接收机的内部噪声。接收电路经过此带通滤波电路以后,在通频带以外的无用信号被衰减,而只有40 KHz左右的有用超声回波信号被保留下来,送到检波电路的输入级,从而将信噪比较高的输入信号提供到下一级的检波电路中。选用LM393(OC)电压比较器作为检测电路器件,将滤波放大后的正弦波变成矩形波,输出高电平约为5 V,可直接驱动TTL电路,连接控制器电路中的RS触发器,控制其输出发生翻转,测距结束。
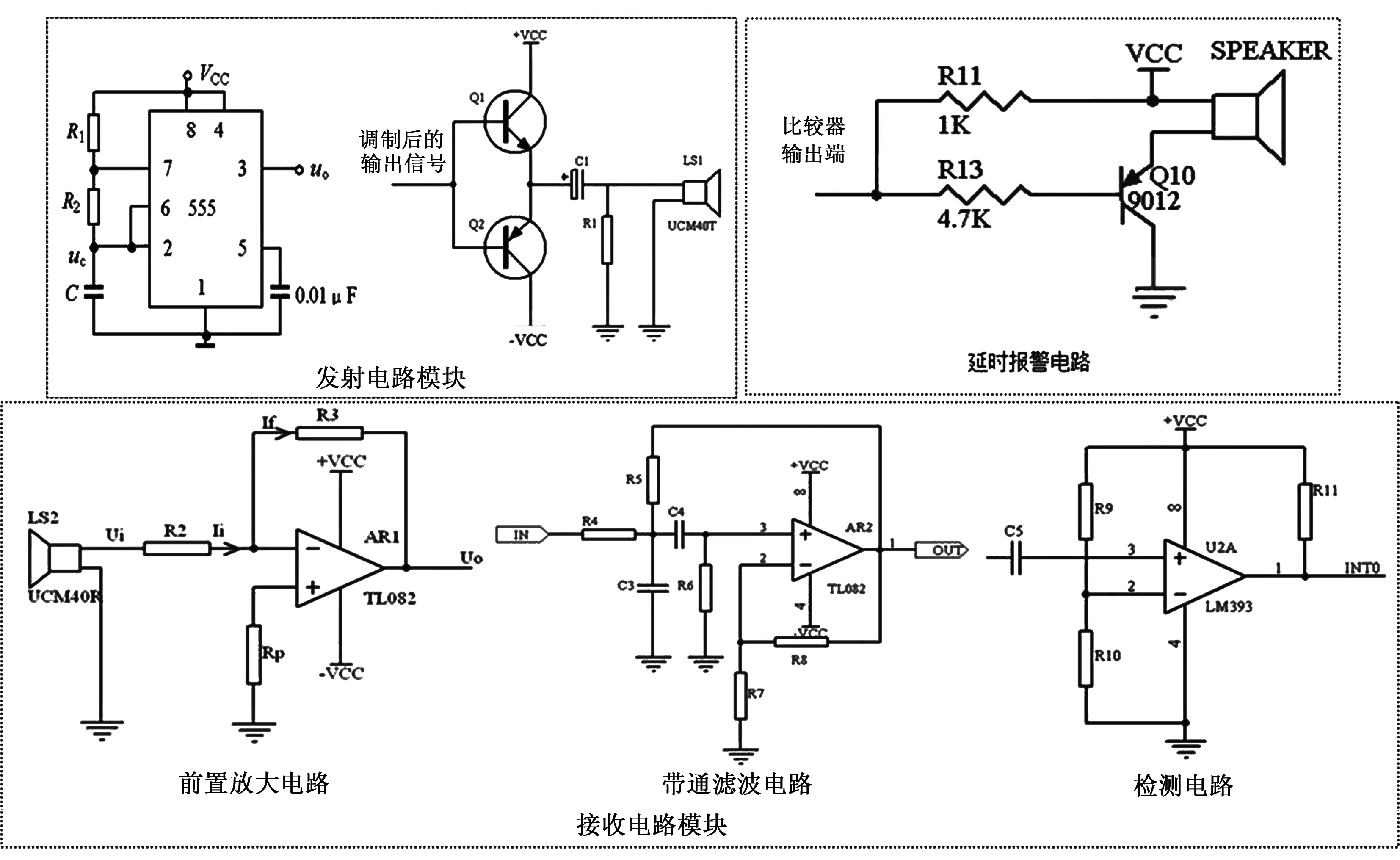
图2 超声波发射接收电路
2.2 数码显示及测温电路
数码显示选用4位LED数码管作为显示器[4],一个74LS48和一个LED数码管连接成一个74LS48驱动电路,数码管可从0~9显示,表示距离s是×××mm的数值及目前环境温度为××℃,2种数值分时间段显示,间隔5秒。测温电路采用DS1820数字温度计采集,测量范围为-55~125℃,-10~80℃时测量精度为0.5℃,根据实测温度值代入(2)式计算超声波实际速度,可校正测量结果。
2.3 控制器电路
控制器电路是本系统的核心,如图3示。系统在发出超声波时开始计数,在收到反射波时停止计数,并显示当前结果。本系统还设置了报警临界值,测量时,当实测距离大于临界值时就发出“嘀嘀”报警声响。系统的区分度为1 cm,采用4个数码管显示输出结果,运用了动态扫描显示方法来减少引线。
模块用一块EPM7128SLC84-15芯片来实现。EPM7128SLC84-15是Altera公司生产的基于高性能EEPROM结构的CPLD[5],工艺采用的是CMOS结构,并以第二代矩阵结构作为基础,完全符合IEEE 1149.1 JTAG边界扫描标准。图中“Multiplexer”为4选1多路选择器,用来控制显示译码器“74LS48”的输入端口连接的数据;“RS触发器”用来控制“12D锁存器”及计数器的状态;“74LS373”为8位锁存器;“comparator”为8位比较器,用来比较预置数值和实际测量值,输出连接到报警电路,当测量值高于预置的报警临界值时,蜂鸣器就会发出警报。

图3 控制器模块原理图
图4为系统测试时序图,当控制信号发出后,超声波发出8个40 kHz脉冲宽度为200 μs的方波脉冲,接收波为幅值衰减的正弦波及经过电压比较器LM393得到的方波。通过波形测出发射接收的时间T,代入公式便可测出距离,其中V是室温在20℃的声波速度,约为334 m/s,最后处理后的测量结果会通过数码管显示出来。

图4 系统测试图
3 实验结果及分析
表1为测量数据及误差表,可以看出测量范围在300~2 000 mm内的误差较少;在200 mm以内误差较大,2 500 mm以后的数据误差明显,引起测量误差的原因有:(1)近区测量时,超声波发射接收探头摆放位置偏差较大,甚至导致存在一定范围的盲区。(2)远区测量误差较大,一是由于发射功率不够大,测量距离不远;二是由于反射物表面不平整,反射信号是从垂直于两探头的轴线之外的点传来;三是发射探头发出的超声波是呈喇叭状扩散传播,导致测量结果必然有误差。但总的实验结果误差在厘米级,完全可以满足近距离测距等工程测量要求。

表1 实验数据及误差
4 结束语
本文设计的基于CPLD芯片为核心的超声测距系统,增设的温度测量电路可消除环境温度造成的误差;回波信号通过电压比较器转变成矩形波,可以消除由于传播距离的增加等造成测量时间的误差。实验表明,该系统在近距离中空气测量精度较高,可以满足机器人定位、微环境探测、液位测量及室内监控技术等不同环境的需求。
由于超声测距不受复杂环境下天气、电磁等方面的干扰,信号处理可靠方便、价格低廉,市场前景十分广阔。随着时间的推移,超声波测距的研究还能够有所改进。首先,研究更先进的超声换能器制造材料。由于换能器采用磁致伸缩或压电陶瓷材料,应用时存在阻抗失配,产生盲区,使测量精度及分辨力受到影响。其次,微环境下的非接触测距技术(包括超声波测距、雷达测距、红外线测距、激光测距等)整合。是否可以通过再组合的形式取长补短,使产品适应更复杂的环境,测量出更精确的结果,也值得今后去深入探讨。
[1]李戈,孟祥杰,王晓华,等.国内超声波测距研究应用现状[J].测绘科学,2011,36(4):60-62
[2]唐小超.室内超声定位的测距系统和通信机制的研究[D].合肥:安徽大学电气工程与自动化学院,2010:26-27
[3]董峰,许水源,许增天.一种高精度超声波测距处理方法[J].厦门大学学报:自然科学版,1998,37(4):50-57
[4]吴超.基于FPGA的超声波测距系统[D].武汉:武汉理工大学理学院,2009:14-16
[5]宋万杰,罗丰,吴顺君.CPLD技术及其应用[M].西安:西安电子科技大学出版社,1999:71-76
[6]郭晓霞.基于多超声波传感器的植苗点智能检测技术研究[D].北京:北京林业大学工学院,2013:15-17
(责任编辑:汪材印)
10.3969/j.issn.1673-2006.2014.05.023
2014-02-26
安徽省高等学校省级优秀青年人才基金项目“高职电子类专业实训网站开发研究”(2012SQRL274)。
杨明(1982-),安徽淮北人,博士生,讲师,主要研究方向:集成电路设计、计算电磁学及天线理论与技术等。
TB559
A
1673-2006(2014)05-0075-04
