基于反步法的机械臂鲁棒自适应位置/力控制
2014-08-06李树荣马慧超
李树荣,马慧超
(1.中国石油大学信息与控制工程学院,山东青岛266580;2.中石化天津液化天然气有限责任公司,天津300457)
在使用机械臂执行去毛刺、抛光等任务时,机械臂终端执行器的运动受到接触环境约束,此时不仅要控制其跟踪给定的轨迹,而且还要控制它与环境之间的相互作用力,满足一定的生产要求。针对这一问题,Raibert等[1]提出了位置/力混合控制,其主要思想是将任务空间分解到两个正交的子空间,分别设计独立的位置和力控制器;Lu等[2]提出了阻抗控制思想来解决接触力问题,它通过调整参考位置间接地实现力控制,其控制精度依赖于对环境知识的了解程度,而在实际应用中,对环境的了解常常是很不精确或无法知道的,这导致了阻抗控制有很大的力误差;Su等[3]提出了降阶状态位置/力控制策略,结合环境约束,利用坐标变换得到降阶的位置/力模型,其策略特点是与环境刚度无关。建模时忽略的干扰和参数的不确定性对控制品质有较大影响,这使得鲁棒控制在机械臂中广泛应用,现已取得丰硕成果[4-7];周芳等[8-9]则利用神经网络等智能控制技术。在以往的研究中很少涉及电机模型,而未建模的驱动电机是高频干扰的主要来源,特别是在高速高精度的应用场合,实际应用效果不好[10]。此外,机械臂和电机的动力学模型存在的相互作用不能忽略,更为重要的是系统的不确定性不仅包含在机械臂动力学模型中,还存在于驱动电机的控制空间。笔者借鉴文献[3]的思想,考虑驱动电机模型,提出一种新的基于反步法的鲁棒自适应控制器设计方案。
1 受约束机械臂描述
1.1 动力学模型
考虑一个n关节位置受限机械臂,定义q∈Rn表示机械臂的关节坐标,则机械臂终端运动受到的环境空间约束可表示为方程

式中,Φ(q)∈Rm。假定约束曲面光滑连续,定义J(q)= ∂Φ(q)/∂qT∈ Rm×n。此时机械臂动力学方程[11]可描述为

式中,M(q)∈Rn×n为惯性矩阵,C(q,)∈Rn×n是与位置和速度有关的向心力和哥氏力矩阵,F(q,)∈Rn是与摩擦力和重力有关的矩阵项,τ∈Rn控制力矩,λ∈Rm是约束平面法线方向上的广义力。环境约束的存在使得系统的阶次可以降到n-m维,也就是说可以用n-m个关节变量来描述受约束系统的位置。记q=[q1,q2]T,q1∈Rn-m,q2∈Rm。因Φ(q)是满秩的,由隐函数存在定理可知,二者的关系可表示为q2=Ω(q1)。假设q1中的元素是选取q中前n-m部分,如果不符合这种假设,则可以通过重新整理式(2)变量的顺序得到符合假设的排列。定义H(q1)=[In-m,∂ΩT(q1)/∂q1]T,则有

将式(3)代入式(2)中,则可改写为
式(4)两边左乘HT,得

定义(q1)=HT(q1)M(q1)H(q1)。式(5)描述的动力学系统具有如下性质[10-11]。
性质1:J(q1)H(q1)=HT(q1)JT(q1)=0。
性质2:-2HTC1为斜对称矩阵,即pT(-2HTC1)p=0,∀p∈ Rn。
性质3:存在参数线性化关系

其中Y(q1,1,u,)∈Rn×k为关节变量函数的回归矩阵;θ∈Rk是描述机械臂的质量特性的未知定常参数向量。
1.2 驱动电机模型
假设机械臂的驱动电机采用具有相同的性能参数的直流电机,减速齿轮具有相同的减速比n。直流电机电压平衡方程为
式中,U为电枢电压;L和R分别为电枢电感和电枢电阻;Ke为电机反动势常数;Δ表示参数不确定性,d(t)表示不确定干扰,ω表示电机轴角位置。ω与机械臂关节角变量q的关系为

电机转矩与电流的关系为

式中,Kt为电机转矩常数。将式(7)、(8)代入式(6)并把不确定项合并为总的不确定项D(t),则电机模型为

其中,,Kc=nKeIn,In表示n维单位矩阵。由式(9)可知,机械臂和电机动力学存在联系,通过1可以影响电机的动力学特性,所以考虑驱动电机模型是合理的。
1.3 系统描述
机械臂是典型的非线性系统,联合式(4)、式(9)得到带有驱动电机的系统模型,描述如下:
本文中提出的控制器分成3步实现,首先将式(4)中的力矩τ作为理想的期望力矩τd,采用自适应策略进行设计;然后完成期望力矩的实现,即电机控制器的设计,这部分利用了鲁棒控制;最后给出闭环系统稳定性的分析。
2 基于反步法的位置 /力控制
反步法在非线性控制中被广泛研究,该方法将复杂非线性系统分解为多个子系统,针对机械臂将控制器分解为动力学控制器以及电机控制器级联的形式,分别设计各个子系统的李雅普诺夫函数,最终确保整个闭环系统是渐近稳定的[12]。
受约束机械臂的控制目标就是让机械臂跟随期望轨迹运动的同时其终端执行器要与接触环境表面维持一个期望力[11]。为了进行控制器的设计,首先做如下假设和说明:
(1)假设电机模型的不确定性是有界的,即。
(2)表示向量的欧几里德范数。
(3)算子λmin(·)为取矩阵的最小特征值。
2.1 动力学控制器的设计
定义符号如下:

式中,em、、q1r、s分别为位置误差、力误差、辅助变量和过滤后的位置误差;Λ为正定对称矩阵。上述定义满足当时,em和m将以指数收敛到零。同样,提出了一种非线性力滤波器,其形式如下:

式中,ef为过滤后的力误差;Λf为正定对称矩阵;γ为正实数。控制器的设计目标是使位置误差和力误差跟随s→0和ef→0而趋于零。将式(11)代入式(4)中可以推导出:

设计如下控制律:

式中,τd为机械臂的期望输入转矩,由于电机动力学特性的存在,电机实际输出转矩τ并不能完全等于τd,这也是设计电机控制器的必要性;为未知定常参数θ的估计值;km和kf分别为位置误差和力误差的正实数增益。动力学控制器表达式中Y(q1,1,q1r,1r)项的存在使控制器具有较好的自适应性,能克服模型的不确定性和干扰等;kmHs项的存在使得系统具有较好的动态特性,km越大,s收敛到零的速度越快;kfef项的存在使得力误差可以达到任意小,满足允许的误差范围,只要选取足够大的kf。将式(14)代入式(13)中,得

式中,为估计误差。式(15)两边同乘HT,并应用性质1,推导出:

设计参数θ的适应律如下:

式中,Γ为正定对称矩阵,即Γ=ΓT>0。
令λmin(Λf)>γ。定义Lyapunov函数为

式(18)对时间求导,并将式(16)代入,得
将式(12)、式(17)代入并应用性质2,得

当=s=ef=0,任意时,1=0。由ef≡0可导出f=0,代入式(12),得到=0。故当且仅当=s=ef==0,1≡0。
现说明动力学控制器表达式与Lyapunov函数选取的关系。应用性质3,得到线性化方程:

联立公式(4)、(14)、(19),得

根据 Lyapunov函数稳定性定理可知,有界。由于1一致连续,根据Barbalat引理可知,代入式(20),得

又因ef是过滤后的力误差,当ef=0时,=0。故系统方程独立的状态变量有、s、ef,则可选取Lyapunov函数为V1。
2.2 电机控制器的设计
将动力学控制器的输出作为参考力矩,则电机转矩误差记为
定义Lyapunov函数为

式(22)对时间求导,得
将式(24)代入式(23)中,得

2.3 闭环系统稳定性
定义闭环系统Lyapunov函数为:V=V1+V2,求导则有
当且仅当=s=ef==eτ=0时,=0。定义e=,V→ ∞,故当e∈R2n+m+k时系统全局渐近稳定。
3 仿真结果
采用二自由度旋转关节机械臂进行仿真,其终端执行器沿约束圆表面运动,如图1所示。
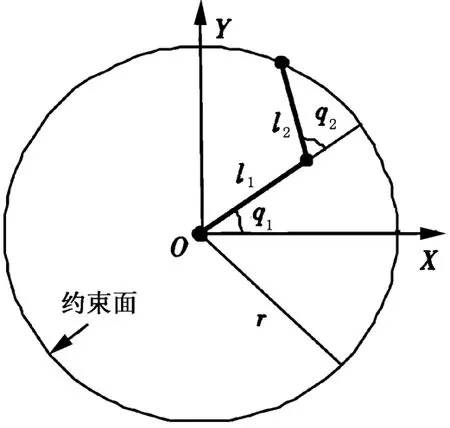
图1 两连杆受约束机械臂Fig.1 Two-link constrained manipulator
机械臂的动力学模型如下:
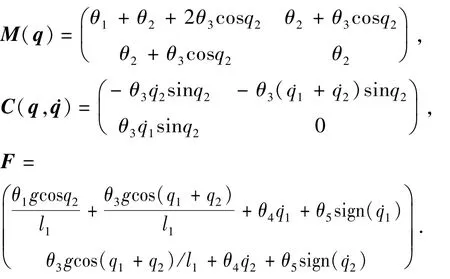
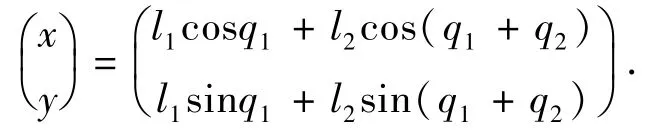
式中,l1=1,l2=0.8,分别为机械臂两个关节臂的长度。取未知参数θ=[θ1,θ2,θ3,θ4,θ5]T。环境约束方程Φ(X)=x2+y2-r2=0,X=[x,y]T。两连杆机械臂运动学方程为
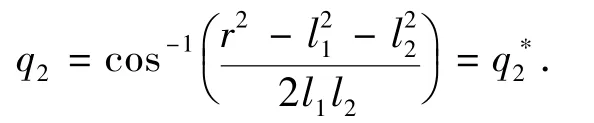
则将约束方程变换到关节空间为

所以关节变量q2是一常数解,有
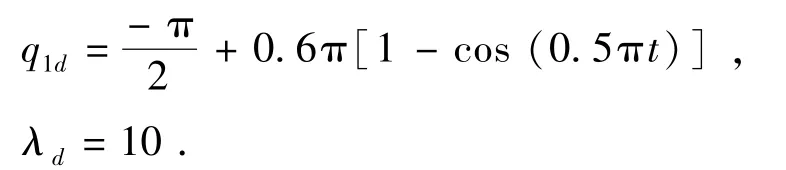
雅克比矩阵为。变换矩阵为H(q)=(1 0)T。期望轨迹和期望力分别为
动力学控制器中各参数取为

电机模型中各参数标称值[10]取为
设电机参数摄动为标称值的15%,为避免参数间影响互相抵消,仅考虑电机参数存在 ΔL、ΔR、ΔKe。则电机模型中各参数实际值为
L=0.115,R=5.75,Ke=0.345,n=1,Kt=2.
图2是关节1位置和速度误差曲线,图3是力跟踪误差曲线,图4是参数的估计值曲线,图5是鲁棒控制器对抑制电机参数摄动影响的曲线。

图2 关节1的位置和速度跟踪误差Fig.2 Position and velocity errors of the first joint
需要说明的是力误差曲线的毛刺主要是因为摩擦力的扰动。从图5可以看出,对于带有参数摄动的不确定系统,本文中所提出的鲁棒控制器比采用标称值设计的控制器具有更高的跟踪精度,有效地抑制了电机参数摄动的影响。
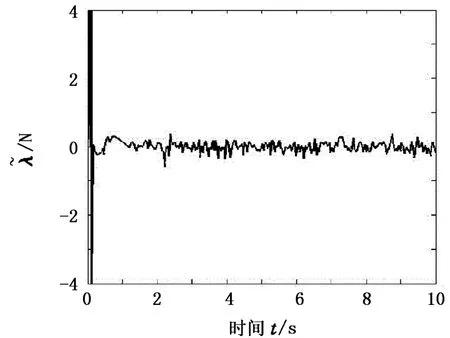
图3 力跟踪误差Fig.3 Force tracking error

图4 参数估计值Fig.4 Value of estimated parameters
图5 参数摄动时鲁棒控制曲线Fig.5 Robust control curves with parameter perturbation
4 结束语
针对受约束机械臂,提出了一种鲁棒自适应位置/力控制方案,控制器的设计考虑了驱动电机模型,并基于反步法将控制器分解为动力学控制器和电机控制器级联的形式,降低了设计的难度。采用的非线性力滤波器使系统在稳定性分析中获得了有界的力误差,动力学控制器中的自适应律对动力学模型的不确定性和扰动是有效的,电机控制器的设计方案对电机模型参数具有一定的鲁棒性。
[1] RAIBERT M H,CRAIG J J.Hybrid position/force control of manipulators[J].ASME Journal of Dynamic Systems,Measurement,and Control,1981,103(2):126-133.
[2] LU W S,MENG Q H.Impedance control with adaptation for robotic manipulations[J].IEEE Transactions on Robotics and Automation,1991,7(3):408-415.
[3] SU C Y,LEUNG T P,ZHOU Q J.Force/motion control of constrained robots using sliding mode[J].IEEE Transactions on Automatic Control,1992,37(5):668-672.
[4] TANG Y.Terminal sliding mode control for rigid robots[J].Automatica,1998,34(1):51-56.
[5] HONG Y,XU Y,HUANG J.Finite-time control for robot manipulators[J].Systems&Control Letters,2002,46(4):243-253.
[6] EFE M O,UNSAL C,KAYNAK O,et al.Variable structure control of a class of uncertain systems[J].Automatica,2004,40(1):59-64.
[7] LIN F,ROBERT R D.An optimal control approach to robust control of robot manipulators[J].IEEE Transactions on Robotics and Automation,1998,14(1):69-77.
[8] 周芳,朱齐丹,姜迈,等.受限机械臂的自适应小波滑模位置/力混合控制[J].华中科技大学学报:自然科学版,2009,37(11):9-12.ZHOU Fang,ZHU Qi-dan,JIANG Mai,et al.Hybrid position/force control of a constrained manipulator using adaptive wavelet sliding mode[J].Journal of Huazhong University of Science and Technology(Nature Science E-dition),2009,37(11):9-12.
[9] SUN M X,GE S S.Adaptive repetitive learning control of robotic manipulators without the requirement for initial repositioning[J].IEEE Transactions on Robotics,2006,22(3):563-568.
[10] KWAN C M.Robust adaptive force/motion control of constrained robots[J].IEEE Proceedings-Control Theory and Applications,1996,143(1):103-109.
[11] CHIU C S,LIAN K Y,WU T C.Robust adaptive motion/force tracking control design for uncertain constrained robot manipulators[J].Automatica,2004,40(12):2111-2119.
[12] 李树荣,薛秀莉,杨青.一类自适应神经网络控制器的设计[J].中国石油大学学报:自然科学版,2008,32(1):138-142.LI Shu-rong,XUE Xiu-li,YANG Qing.Design of adaptive neural network controller for a class of multiple time-delays nonlinear system[J].Journal of China University of Petroleum (Edition of Natural Science),2008,32(1):138-142.
