基于慧鱼机器人传菜梯的设计
2014-08-01王晓凯
张 超,王晓凯
(安徽科技学院 机械工程学院,安徽 滁州 233100)
基于慧鱼机器人传菜梯的设计
张 超,王晓凯
(安徽科技学院 机械工程学院,安徽 滁州 233100)
本文以慧鱼创意组合模型为平台,设计出一种传菜梯的结构模型.该传菜梯利用触动开关进行位置控制.传菜梯采用慧鱼智能接口板进行软硬件的连接,用直流电动机驱动.ROBOPro软件控制传菜梯完成一系列动作.本文首先介绍传菜梯的基本原理,然后确定驱动和传动方案,利用ROBOPro软件编写出相应的控制程序来进行测试运行,完成传菜梯的软硬件的设计,成功实现传菜的功能.
机器人;传菜梯;慧鱼创意组合
随着科学技术的高速发展,人们的物质生活水平不断地提高,同时人口也在爆炸式的不断增长,人类的生活空间相对缩小,同时人们对于生活环境的要求也在不断地提高,越来越拥挤的生存空间以及人们对方便快捷的生活方式的追求,使得建筑业得以迅速的发展,一栋栋高楼大厦拔地而起,十几层甚至几十层的宾馆、饭店、办公楼、住宅楼鳞次栉比.可以想到,随着社会的发展,电梯产品在人们物质生活中的地位将越来越重要,越来越不可缺少.
传菜梯、传菜梯是由杂物运送电梯演化升级而来,中国质量监督检验总局条文指定的该产品的名词为杂物电梯,用于宾馆、酒店、饭店、医院、部队、学校、幼儿园等厨房内部运送各种物资,由于其多用于不同楼层之间传送菜盘,所以人们称之为“传菜梯”.传菜梯的出现很好的解决了饭店、宾馆等送菜的问题,既节省人力又安全快捷、经济高效,所以传菜梯得以快速的发展.
传菜梯的作用就是将厨房烧好的饭菜送到指定的房间里去,供客人们食用,首先厨房工作人员将饭菜放入传送箱中,通过数字小键盘输入指定的房间代码,按确认键,然后传送箱在驱动装置的带动下先竖直移动到指定的楼层,然后再横向移动到特定的房间里去,由服务员将饭菜端至餐桌供客人们食用,然后服务员按键确认饭菜以端出,从而传送箱在驱动装置的带动下回到厨房进行下一次饭菜的传递,循环传菜.
传菜梯还有很大的发展空间,可以向更加智能化的方向发展,首先在点菜环节,客人到达房间后,传统方式是由服务员拿来菜单,并记录下客人所点的菜,然后将点菜单送至厨房.
智能化的发展是,每个房间都有一个小的显示器触屏,上面显示的是饭店里所有的菜,并且有菜的图片、价格、口味等各种信息,用手指点击就可以选定要上的菜,选好以后,将整个菜单提交,这样数字化的菜单就能通过线路传输到厨房,厨房这边也有相应的显示器,用于接收所用房间传来的点菜单,再来烧制饭菜通过传菜梯传送到相应的房间去.这样能节省人力,更加方便快捷,实现智能化.
1 传菜梯的传菜原理
传菜梯,顾名思义,就是可以根据输入的具体房间号码信息,将饭菜安全准确的传送至指定的房间,然后由服务员将菜盘端至餐桌上,供客人们食用.而我们的产品能独立完成这一系列的动作.因此该传菜梯必须具备以下的基本功能,才能完成上述一系列的动作.首先,应能完成信息的输入,从而来指定具体的房间,该部分由几个触动开关传感器组合而成.其次,应能进行纵向的传输,使托盘到达指定的楼层.第三,应能进行纵向和横向之间的换接,交接给仿人机器人后通过横向和纵向的传动装置回到厨房,等待下一次传送.第四,再通过仿人机器人进行横向的传输,将托盘送至指定的房间.第五,机器人能安全准确的把托盘放至桌面上.放下托盘后,机器人返回等待下一个指令.第六,机器人能按照指令进行结账,收盘等功能.
1.1 传菜梯的基本组成要素分析
本次设计的传菜梯系统是一个典型的机电一体化系统.所谓的机电一化系统是指在系统的主功能、信息处理功能和控制功能等方面引了电子技术,并把机械装置、执行部件、计算机等电子设备以及软件等有机结合而成的系统,即机械、执行、信息处理、接口和软件等部分在电子技术的支配下以系统的观点进行组合而形成的一种新型机械系统.
该传菜梯模型就是依据机电一体化系统的组成原则进行设计的.其主要由以下四个基本组要素:动力驱动部分、传感检测部分、控制及信息处理部分、执行部分.
1.2 传菜梯的机器本体结构
传菜梯的机器本体包括机械传动装置和机械控制装置.其主要功能是使传菜梯构造系统的各子系统、零部件按照一定的空间和时间关系安置在一定的位置上,并保持特定的关系.首先在厨房接入入口通过纵向传动装置,在纵向传动底盘上分四个窗口,分别放物品,传送到指定楼层后由四轮仿人机器人用拟人化托手将托盘放至机器人的保温箱体内,以便客人能享用到更美味的食品.再由机器人扫描将贴有标签的托盘送至指定房间的指定餐桌.
1.2.1 动力部分
动力部分的功能是按照传菜梯的控制要求,为系统提供动力以保证的系统正常运行.
1.2.2 驱动部分
驱动部分的功能是在控制信息的作用下,驱动各种执行机构完成各种动作和功能.
1.2.3 传感检测部分
传感检测部分的功能是对系统运行过程中所需要的本身和外界环境的各种参数及状态进行检测,并转换成可识别信号,传输到ROBOPro接口板,经过分析、处理后产生相应的控制信息.本次的传菜梯设计中用到的传感器是接触传感器即接触行程开关.主要是检测和反馈传菜箱体的位置信息,并将检测信息传送到接口板,经处理后由接口板发出相应的指令信息.
1.2.4 控制及信息处理部分
控制及信息处理部分是传菜梯的核心部分.其功能是将来自传感器的检测信息和外部的输入命令进行集中、存储、分析、加工,根据信息处理结果,按照一定的程序发出相应的控制信号,通过输出接口送往执行部件,控制整个系统有目的地有序运行.传菜梯的控制与信息处理单元主要由计算机、可编程控制器、逻辑电路及I/O接口等组成.
1.2.5 执行部分
执行部分的功能是根据控制信息和指令完成所要求的动作.本次设计中的执行部件采用齿轮齿条传动机构以及丝杠螺母传动机构完成传菜箱的传送.
2 方案设计
2.1 传菜梯的信息输入
我们要将饭菜传送至指定的房间,所以要将不同房间进行编码,将房间的代码信息通过输入装置输入传菜梯的控制系统中,才能控制驱动执行部件去完成指定的动作.本次设计一共模拟了四个小房间,分成两楼,每楼两间房,分别标号为1、2、3、4.所以房间信息的输入部分用了五个触动传感器开关,其中四个用于选择指定的房间,还有一个用于输入信息确认.
2.2 传菜梯的纵向传动
由于各大饭店的厨房一般都在一楼,而且饭店的楼层都很多,所以应通过传菜梯的纵向传动机构实现不同楼层之间的传送,通过行程触动开关和控制程序的设计来实现不同楼层之间的识别.纵向传送装置主要包含箱体,箱体内底部开设有传菜托盘滑槽,位于传菜托盘滑槽的一端设置有侧推滑块,侧推滑块通过传动螺杆与设置在箱体外底部一侧的带减速器的电动机传动连接,传菜托盘滑槽的另一端设置有传菜托盘出入口,箱体的外顶部中心设置有升降滑轮,升降滑轮通过升降绳索与升降机传动连接;并在每个楼层都设四个不同的传送窗口,以便能更快捷的传送物品.
2.3 传菜梯的横向传动
横向传送装置主要包含支架,支架上设置有导向滑槽,导向滑槽内滑动连接有移动托板或移动链板,所述传菜托盘出入口的宽度与移动托板的宽度相等,所述移动托板通过设置在其两侧边的传动杆传动连接,所述两传动杆的一端均固定连接有相同的传动链轮,所述两传动链轮通过同一个传动链条与设置在支架的一端的带有减速器的电动机传动连接.
进一步说,侧推滑块和移动托板上均设置有电磁传菜托盘吸附装置,电磁传菜托盘吸附装置和带有减速器的电动机均与智能控制系统电连接.
更进一步说,箱体四周侧壁上设有隔热层,箱体的下方设置有支撑脚,传菜托盘出入口的两侧壁上设有导向斜面或导向弧面.
本实用新型的有益效果:本实用新型不仅能将菜纵向传送至不同的楼层,而且可以横向传动至不同的房间,这不仅提高了上菜效率,且大大减轻了服务员的劳动强度和降低出错率.
2.4 自助服务功能
本传菜梯还结合了以往的传菜梯的传送功能及服务员的点餐、语音介绍及自助刷卡结账功能,这是它的独特之处,它是传统传菜梯的结合体,通过触动开关开启服务功能,发出指令后由传感器检测识别相关的服务项,再由控制系统做出对应的决策,由执行器执行相应的动作.
3 设计的最终结果及改进
经过上述的所有设计过程,认真调试程序和调整传菜梯中各个零件之间的位置,使传菜尽可能准确的到达指定的楼层和房间,最终的模型图如图1所示.
由于受实验室慧鱼机器人模块不足的限制,只能进行粗略的传送,设计中所用到的零件全是根据要求自己创新组合而成,所以在完整性、准确性、外观等方面有很大的欠缺,有待进一步的改进.其中纵向和横向的换接可以用电磁铁的吸合等方式实现,还有当饭菜传送至指定的房间后,应在传菜箱的底面上设计一个触动开关,由于饭菜自身的重量,该开关始终处于闭合状态,当服务员端出饭菜后,开关会自动弹开,然后再延时一定时间后,自动返回至厨房,等待下次传送,这样可以避免由于服务员的失误而造成饭菜没有及时端出的问题.也可以在每个房间都设置一个开关,当服务员按下开关后,传菜箱才会返回,设计中如果按照上述方法设计,则要多用4个触动开关,而扩展板上没有多余的接口,所以未能实现.
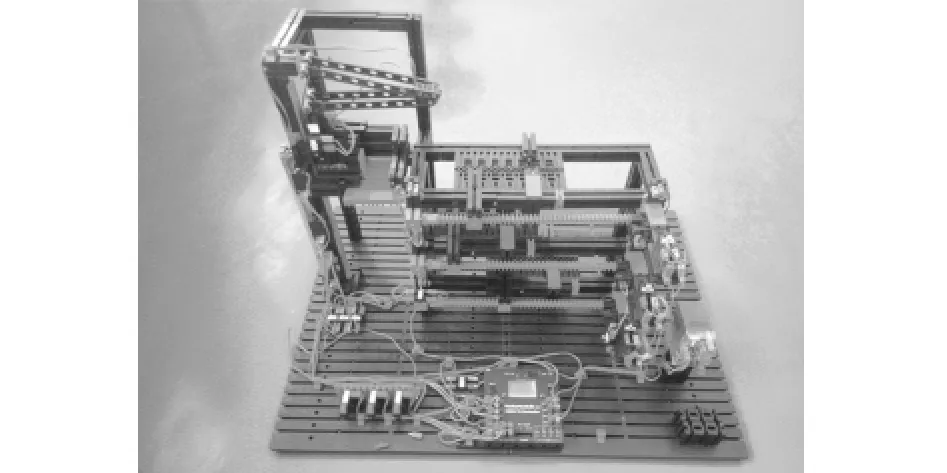
图1 传菜梯模型图
4 结语
本次论文设计的题目为:基于慧鱼机器人传菜梯的设计.设计时,主要涉及到机械传动、机械结构、传感器技术及其应用等相关的专业基础知识.通过设计达到传菜的目的.
在进行本次设计之前,在设计的过程中,首先是根据实验室中现有的资源,设计、组装传菜梯的本体,并确定各种运动和传动的方式,然后,根据传菜梯要实现的功能,选择合适的传感器.传菜梯的本体设计好后,便进行控制程序的编制与调试,设计出符合要求的传菜梯传送系统.
〔1〕杨斌.智能机器人[J].中国高新技术企业,2009(6):80.
〔2〕张炜.机器人ROBORIOR[J].机器人技术与应用,2007(2):24-28.
〔3〕熊光明,赵涛,龚建伟,等.机器人发展综述及若干问题探讨[J].机床与液压,2010(3):212-215.
〔4〕徐国保,尹怡欣,周美娟.智能移动机器人技术现状及展望[J].机器人技术与应用,2010(2):29-34.
〔5〕梁景凯,盖玉先.机电一体化技术与系统[M].北京:机械工业出版社高教分社,2012.
〔6〕郑文纬,吴克坚.机械原理[M].北京:高等教育出版社,2010.
〔7〕谢存喜,张铁.机器人技术及其应用[M].北京:机械工业出版社,2008.
〔8〕曲凌.慧鱼创意机器人设计与实践教程[M].上海上海交通大学出版社,2007.
〔9〕刘极峰,易际明.机器人技术基础[M].北京:高等教育出版社,2011.
〔10〕高国富,谢少荣,罗均.机器人传感器及其应用[M].北京:化学工业出版社,2008.
〔11〕李云江.机器人概论[M].北京:机械工业出版社,2011.
TP242.3
A
1673-260X(2014)11-0047-03
安徽科技学院大学生创新创业训练计划项目资助
