基于VG400CD-100的微惯性测量组合标定*
2014-07-31徐媛媛马小勇
徐媛媛, 马小勇
(1.紫琅职业技术学院,江苏 南通 226000; 2.南通中远川崎船舶工程有限公司,江苏 南通 226000)
基于VG400CD-100的微惯性测量组合标定*
徐媛媛1, 马小勇2
(1.紫琅职业技术学院,江苏 南通 226000; 2.南通中远川崎船舶工程有限公司,江苏 南通 226000)
在对微惯性测量组合的发展和应用进行分析的基础上,从微惯性测量组合的结构及基本工作原理出发,针对微惯性测量组合系统进行了误差源分析和标定技术研究。以微惯性测量模块VG400CD-100为研究对象,分析了微惯性测量的组合技术,建立误差模型方程,研究了微惯性测量组合系统的标定,给出了三维陀螺仪标定的比例系数和交叉耦合误差系数以及三维加速度计标定的比例系数和交叉耦合误差系数。然后利用MATLAB数据分析工具,采用最小二乘法回归理论,对标定实验数据进行分析和处理,最终完成对微惯性测量器件,即微陀螺仪和微加速度计各误差系数的标定。
微惯性测量组合;微机电系统;数据采集;误差分析;标定技术
1 引 言
惯性导航系统(Inertial Navigation System,简称INS)是以牛顿力学定律为基础,是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统[1]。具有很好的隐蔽性,其工作环境不仅包括空中、地球表面,还可在水下。惯性导航通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置信息等。但是,它的主要缺点是导航定位误差随时间积累,因而无法保证长时间工作的定位精度。
2 惯性导航的工作原理
捷联惯导系统是将惯性测量器件直接固连在载体上。捷联式惯导系统[2-3]如图1所示,捷联式惯性导航系统是把惯性器件,即陀螺仪和加速度计直接固定在运载体上,陀螺仪和加速度计分别测量运动载体相对惯性空间的三个转动角速度和三个线加速度沿运载体坐标系的分量,经过坐标转换,把加速度信息转化为沿导航坐标系的加速度。经过计算,得到运载体的位置、速度、航向和水平姿态等各种导航信息。由于计算机完成了惯导平台的功能,因此也称为“数学平台”。

图1 捷联式惯性导航系统原理示意图
3 微惯性测量组合的构成
微惯性测量组合的功能是测量运载体在载体坐标系中三个正交方向的线加速度和角速率信息,并将敏感值以电信号形式传输给数据采集模块。采用的是基于微机电系统技术的微惯性测量组合,它由3个微机械陀螺仪和3个微机械加速度计所组成[4]。
VG400CD-100是一种高动态、低成本、六自由度的惯性测量单元,可用于导航和控制,动态测试等场合。该单元中包括微机械压电振动陀螺仪(或称为压电晶体陀螺仪)及微机械加速度计,可提供角速度和线加速度的测量信息,且具有高可靠性。每个微惯性测量组合中包括3个陀螺仪和3个加速度计,及温度测量器件如图2、3所示。

图2 MIMU微惯性器件安装示意图

图3 MIMU基本结构组成
4 微惯性测量组合误差分析
4.1 微惯性测量组合系统误差源
微惯性测量组合系统作为一种捷联惯性导航系统,其工程实现的各个环节中不可避免地存在误差,这些误差因素称为误差源。可大致分以下几类[5]:数学模型的近似引起的误差、惯性敏感器件的误差、计算机的算法误差、初始对准误差、载体的角运动所引起的动态误差。
4.2 微惯性器件误差
微惯性器件误差主要由确定性误差及随机误差构成,如图4所示,前者主要指扰动误差(敏感物理模型中的参数变化)和环境敏感误差(敏感环境的干扰);后者指由不确定因素引起的随机漂移,主要包括偏差不稳定性、速率随机游走和角随机游走。

图4 微惯性器件主要误差源
微惯性器件应用于导航系统前必须经过误差补偿,要进行补偿首先必须对微惯性器件各误差建立误差模型,然后对各误差进行标定,最后再对这些误差进行补偿。
4.3 惯性测量组合器件的标定
4.3.1 陀螺仪的标定
(1) 刻度因数 陀螺仪的刻度因数是指陀螺仪输出量与输入角速率的比值,它用某一特点的直线斜率来表示,该直线是根据整个角速率测量范围内测得的输入、输出数据,用最小二乘法拟合求得。
在三轴飞行仿真转台上进行测试实验,将微惯性测量组合固定在三轴飞行仿真转台上,使其输入轴和转台转轴平行。这3个陀螺仪组合为三维的陀螺仪组件,是敏感角速度运动的,量程为±100(°/s)。所以,角速率作为输入的速率标定实验就是使微惯性器件承受输入角速度Ωj,测量其输出电压Fj的信息,以确定陀螺仪的刻度因数KG以及不正交系数[5]。给惯性测量组合标定轴的陀螺仪不同的转速,转速分别取为±5(°/s)、±10(°/s)、±20(°/s)、±30(°/s)、±40(°/s)、±50(°/s)、±60(°/s)。
(2) 安装误差系数标定 假如当系统的x轴以Ωx=+50(°/s)匀速旋转时,y轴输出Vy1,z轴输出Vz1;以Ωx=-50(°/s)匀速旋转时,y轴输出Vy2,z轴输出Vz2。
假如当系统的y轴以Ωy=+50(°/s)匀速旋转时,x轴输出Vx1,z轴输出Vz3;以Ωy=-50(°/s)匀速旋转时,x轴输出Vx2,z轴输出Vz4。
假如当系统的z轴以Ωz=+50(°/s)匀速旋转时,z轴输出Vx3,z轴输出Vy3;以Ωz=-50(°/s)匀速旋转时,x轴输出Vx4,z轴输出Vy4。
则不正交系数定义为:
(1)
4.3.2 加速度计的标定
(1) 刻度因数
加速度计的刻度因数是指陀螺仪输出量与输入角速率的比值,它用某一特点的直线斜率来表示,该直线是根据整个角速率测量范围内测得的输入、输出数据,用最小二乘法拟合求得。
将微惯性测量组合固定在三轴飞行仿真转台上进行重力场翻滚实验测试[6]。
先同样用数字式电子水平仪将转台台面调至水平,使加速度计的敏感轴指天。因为安装支架平面与转台的水平面之间存在误差,因此不断微调转台位置,使加速度计输出的电压达到负的最大值,加速度计安装支架处于水平位置。在此位置的基础上,转台旋转90°使加速度计处于零位,此位置为初始位置。依次旋转垂直方向的转台,每隔15°作为一个实验测试位置,直到转过180°回到相反位置。
(2) 安装误差标定
如图5所示,存在安装误差的情况,设加速度计基面存在误差角θ。此时,重力加速度g会对加速度计输出产生影响,于是,利用重力加速度g在加速度计敏感方向的耦合对安装误差角进行标定。将微惯性测量组合安装在分度头上,设yb轴垂直于分度头台面。将分度头台面调至水平,将垂直于yb且与分度头台面平行的方向记为xb。此时,将x方向的加速度计输出记为ax1,将分度头顺时针转过180°,将此时的加速度计输出记为ax2,可得加速度计不正交系数定义为:
(2)
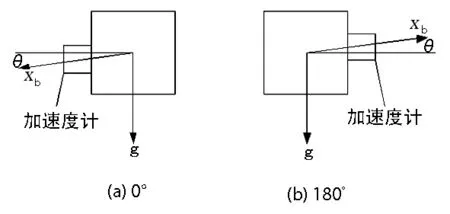
图5 安装非正交示意图
4.4 标定数据的处理
4.4.1 陀螺仪标定结果
(1) 陀螺仪的刻度因数与非线性度的计算
测出的数据经过处理后,刻度因数的拟合曲线如图6所示。根据刻度因数公式可得刻度因数与非线性度如表2所列。

表2 刻度因数与非线性度
(2) 陀螺仪交叉耦合系数的计算
根据不正交系数公式可得交叉耦合系数如表3所列。

表3 交叉耦合系数
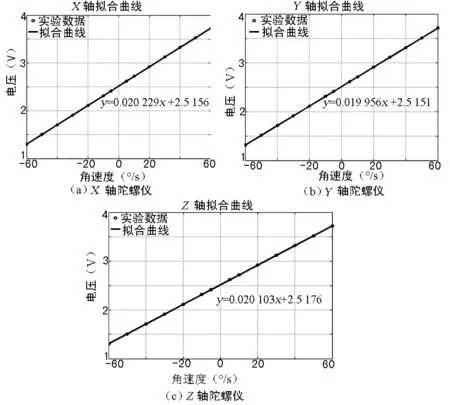
图6 陀螺仪刻度因数的拟合曲线
4.4.2 加速度计算结果
由x、y、z轴构成的一个三维的加速度计组件。以表5.1的位置放置,从位置0o、15°、30°、45°、60°、75°、90°、115°、120°、135°、150°、165°、180°,这13个位置对加速度计进行标定。
(1) 加速度计刻度因数与非线性度的计算。
测出数据经过处理后,刻度因数的拟合曲线如图7所示。

图7 加速度计的拟合曲线
根据刻度因数公式可得刻度因数和非线性度如表4所列。
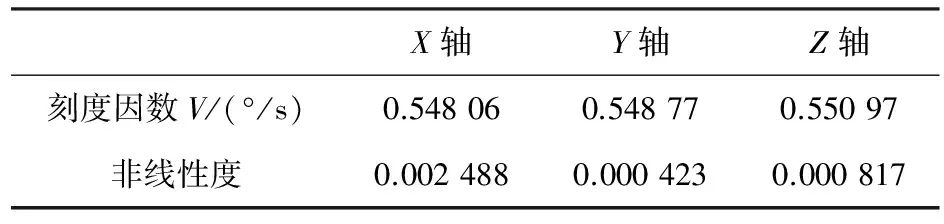
表4 刻度因数和非线性度
(2) 加速度计的交叉耦合系数的计算
加速度计的交叉耦合系数如表5所列。

表5 交叉耦合系数
4.5 随机误差的数字模型
4.5.1 陀螺仪漂移数据的采集与标准化处理
对陀螺仪漂移补偿之前,首先要建立陀螺仪漂移的数学模型,但在建立数学模型时,必须要对所采集到的样本数据进行预处理,把数据变成平稳、正态、零均值的时间序列,再确定数学模型的类别和阶次。
陀螺仪的信号是连续信号,而采用的时序分析理论,必须要求建模的对象是离散的,这就需对连续信号进行采样。以x轴为例,采样周期为1 s,进行3 min的试验。如图8所示为采样的陀螺仪漂移的原始信号。对陀螺仪漂移信号建立时序模型前,首先应保证所采集的信号为平稳、正态、零均值的时间序列。原始信号中包含常值分量和随机分量,可通过求均值的提取常值分量。当去掉常值分量的陀螺仪信号为零均值信号如图8。对于一般的测量系统正态也能够保证。但因受外部环境及内部因数的干扰,信号的平稳性却很难保证。一般陀螺仪漂移还存在趋势项。
从图9所示的陀螺仪随机漂移数据来看,趋势主要表现出一次或二次多项式关系。对陀螺仪随机漂移信号进行多项式拟合后,知其具有一阶线性趋势。如图10所示为陀螺仪随机漂移信号的线性趋势。同样去掉陀螺仪漂移存在趋势项得到如图11所示的陀螺仪随机漂移信号。
4.5.2 陀螺仪漂移的模型与识别
陀螺仪原始信号经过去掉常值项和趋势项后,得到了平稳随机时间序列。现可采用时间序列的方法进行建模,构建一个数学模型,来逼近真实的随机漂移数据,然后用这一模型对陀螺仪进行预报,从而达到补偿的目的。所采用的数学模型是建立AR模型来陀螺仪漂移模型。
笔者利用AR(P)模型的参数估计方法对陀螺仪随机漂移数据进行建模,利用AIC准则检测模型的阶次。AIC准则函数如下:
(3)
式中:N为样本的大小;n为预先给定的模型最高阶数。

图8 陀螺仪漂移的原始信号 图9 陀螺仪漂移随机漂移信号

图10 陀螺仪漂移信号的线性趋势图 图11 去趋势项的陀螺仪漂移数据
若AIC的准则函数取得最小值时的模型为适用模型。
①模型的建立 由于陀螺仪漂移模型的阶次比较低,一般不会超过4阶,这样可在模型参数数目等于4的范围内查找出AIC最小值的模型作为陀螺仪漂移的数学模型。
对图10去掉趋势项后的采样数据,用最小二乘法估计不同模型下的参数,并计算相应的AIC值,结果如表6所列。

表6 陀螺仪随机漂移的参数
从表6中可看出,AIC值最小的是AR(1),因此AR(1)为陀螺仪漂移模型。
②陀螺仪漂移模型结构的确定 综上所述,陀螺仪的漂移信号由常值分量和随机分量组成。常值分量可由均值确定,随机分量又可分解为趋势项和平稳随机过程。从图9陀螺仪的线性趋势项来看,陀螺仪的趋势变化较缓慢,在较小的时间间隔内可认为没有变化。这样可采用分段取均值的办法将趋势项也归到常值分量中,从而陀螺仪漂移模型的结构为常值加平稳随机过程。
5 结 语
研究探讨了微惯性测量组合的相关理论和技术;从微惯性测量组合的结构及基本工作原理出发,分析了微惯性测量组合系统的误差源,并建立了微惯性测量组合系统的误差模型;根据微惯性测量组合系统的误差模型,标定出各误差参数。笔者主要对微惯性测量器件进行了误差分析,分别对微陀螺仪和微加速度计建立误差模型,并且考虑微陀螺仪的随机误差给系统精度带来了很多不利影响,采用时间序列分析原理,建立陀螺仪漂移AR模型。通过对微惯性测量组合的标定与分析,确定各种误差源对系统的影响,进而恰当选择系统的编排及合理提出数学模型,以便有效进行误差补偿,减小误差所带来的影响,从而提高导航系统的准确性。
[1] 周永余,许江宁,高敬.舰船导航系统[M].北京:国防工业出版社,2006.
[2] 陈 哲.捷联惯性导航系统原理[M].北京:宇航出版社,1986.
[3] Shibata M, Error Analysis Strap Down Inertial Navigation Using Quaternion[J].Journal of Guidance, Control, and Dynamics,1997,7(3):329-381.
[4] 龙达峰,陈银溢.微惯性测量组合的研究[J].科技情报开发与经济,2006,16(14):145-147.
[5] 陈银溢.微惯性航向姿态系统研究[D].太原:中北大学,2005.
[6] 顾启泰,尚 捷,毛 刚,等.MIMS/GPS组合导航系统设计与实验[J].航空学报,2003,24(3):269-272.
Calibration of Micro Inertial Measurement Unit Based on VG400CD-100
XU Yuan-yuan1, MA Xiao-yong2
(1.ZilangVocationalandTechnicalCollege,NantongJiangsu226000,China;2.NantongCOSCOKHIShipEngineeringCo.,Ltd,NantongJiangsu226000,China)
Based on the analysis of the development and application of MIMU,error analysis and researches calibration technology from the structure and the principle of MIMU are done. Taking the MIMU of VG400CD-100 as research object,The error model equation is set up. The calibration experiment of MIMU is studied. The scale coefficient of three-dimensional gyroscope and the coefficient of cross-coupling error, the scale coefficient of three-dimensional accelerometer and cross-coupling error are all given. Then, the data of calibration experiment is analyzed and is processed by using the MATLAB data analysis tool and the least squares method regression theory. Finally, calibrating various error coefficients from the micro inertial measurement component,namely micro gyroscope and micro accelerometer are completed.
MIMU;MEMS;data processing;error analysis;calibration technology
2013-11-26
徐媛媛(1982-),女,江苏南京人,工程师,研究方向:机械设计、机电一体化。
TM138
A
1007-4414(2014)01-0184-04