一种并联机器人的运动学建模方法的研究*
2014-07-31刘平安廖小东
刘平安,王 铨,廖小东
(华东交通大学 机电工程学院,江西 南昌 330013)
一种并联机器人的运动学建模方法的研究*
刘平安,王 铨,廖小东
(华东交通大学 机电工程学院,江西 南昌 330013)
并联机构形式多样,结构复杂,其运动学模型多为非线性方程组,建立和求解往往很复杂,要获得其位置分析封闭解更是具有较大难度。通过数值法建模后,运用连续法利用Matlab编程求解复杂并联机构的运动学问题,具有事半功倍的效果,为并联机器人运动学建模和求解提供了一种有效途径。
并联机器人 位置分析 连续法 Matlab
1 引 言
并联机器人一般为上、下平台即动、静平台用两个或两个以上的运动支链相连,机构具有两个或两个以上自由度,且以并联方式驱动的闭环机构[1]。由于自身的多环闭链结构使得相比串联机构在性能上有很多优点,如刚度高、结构稳定、承载能力强、运动惯性小、误差小、精度高、动力学性能好、控制容易等。但由于并联机器人中出现的多环闭链结构使得分析研究变得复杂,如对机构尺寸的优化设计、运动学模型的建立与求解,奇异性分析及控制等,这些问题直接影响着并联机器人的应用与发展。国内外关于并联机器人的研究主要集中于结构学、运动学、动力学和控制策略的研究等几个方面。其中并联机器人的结构学与运动学主要研究并联机器人的构型综合、运动分析、奇异位型、工作空间和灵巧度分析以及位置校准等。这项研究是实现机器人设计、控制和应用研究的基础,因而在并联机器人的研究中占有重要的基础地位。
2 运动学建模的方法
并联机器人运动学分析包括位置分析、速度分析和加速度分析,其中位置分析是指求解输入与输出构件之间的位置关系,是机构运动分析的最基本任务,是对机构进行速度和加速度分析,动力学分析等的基础[2],也是运动学分析的关键,它包括位置正解和位置反解。与串联机器人相反,并联机器人位置逆解较容易,而正解非常复杂,尤其难有统一的方法,且普遍存在多解情况。位置求解常用的方法包括解析解法[3]、数值解法[4]和附加传感器法[5]。
数值算法是其中一种最常用的方法,它可求解任何并联机构,建立数学模型相对容易。数值解法采用非线性方程的方法,通过优化搜索或迭代来逼近真实解,当给定初值时,寻找一个在初值附近较合适的解。数值解法的优点是数学模型比较简单,最大缺点是位置初值不易确定,易造成搜索不收敛,一次只能得到一组解,不能给出全部解。欲研究机器人运动学首先必须建立机器人各杆件的构件坐标系,进而根据机构特点建立机构约束方程。由于机构运动学多为非线性问题,故建立的方程常为非线性多项式方程组,因此我们对于并联机器人的运动学求解主要是求解非线性多项式方程组。建模过程如图1所示。

图1 过程流程图
连续法是20世纪70年代开始进入实用求解非线性方程的数学方法[6]。连续法有2个突出的特点,①方程求解时无需给出较高的初始值;②可一次性求得方程组的全部解。笔者结合Matlab[7]运用连续法来求解多项式方程组的解,即利用Matlab的可编程能力编出连续法的通用程序来求解一般的并联机器人的运动学方程。其流程图如图2所示。

图2 程序流程图
3 典型并联机器人运动学建模
3.1 4-RPUR[8]并联机构的运动学建模
如图3所示,4-RPUR并联机构包含4条RPUR支链,并且每条支链由2个转动副,1个移动副和1个万向铰组成。分别以动平台和静平台中心为坐标原点建立坐标系,动平台坐标系相对于静平台的位姿,由分析可知具有三个移动和绕Z轴的转动自由度,选取动平台中心到各端点Pi的距离为m,静平台半径为R;驱动杆EiBi长度为Li,连杆PiEi长度为L0,PiEi与Zd轴反方向夹角为β,绕Z轴的转动自由度,相对转角为φ,各驱动杆与静平台之间的夹角为θi。设Ei在坐标系Oi-xiyizi的向量为(xi0zi)T(i=1~4)
由分析知:
动平台的位姿可以定义为矩阵:
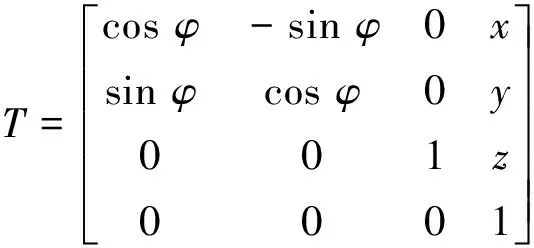
(1)
设Pi在图3动坐标系中的向量可表示为Pi′,有:
(2)
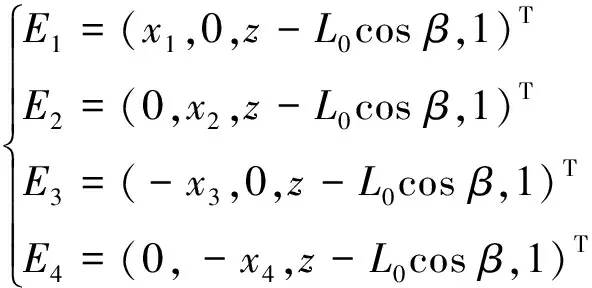
故其在定坐标系中位置可表示为:
(i=1~4)
(3)
由以上可知机构的方程为:
(4)
由分析知可得方程:
i=1~4
(5)
3.2 3-RPC并联机构的运动学建模
如图4所示3-RPC并联机构中每条支链由一个转动副,一个移动副和一个圆柱副组成。分别以动平台和静平台中心为坐标原点建立坐标系。如图5所示,取其中一支链进行分析建立约束方程。
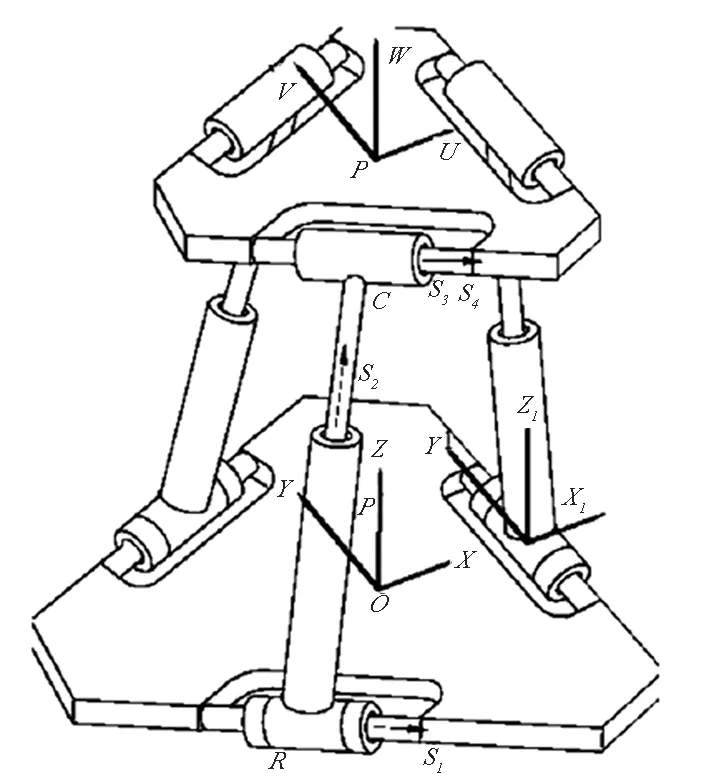
图4 3-RPC机构简图

(6)
式中:φi、a、b为已知。
代入参数有:

(i=1~4)
(7)
已知px,py,pz,求li为运动学逆解,已知l1,l2,l3,求px,py,pz为运动学正解。
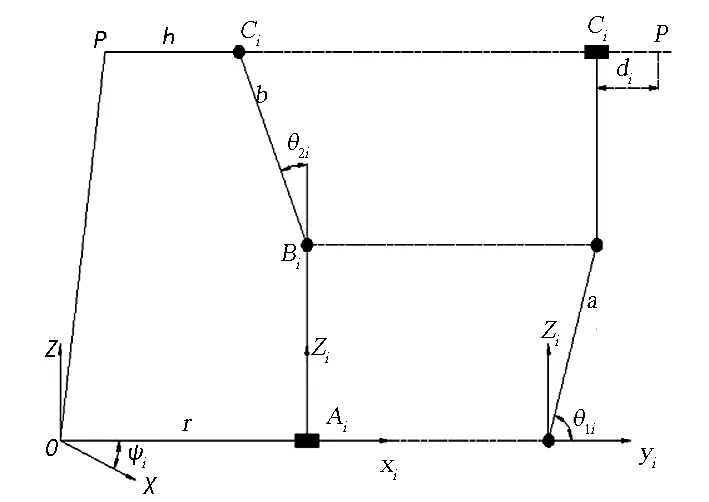
图5 3-RPC机构支链图
4 基于Matlab实例计算与分析
对于4-RPUR机构非线性方程一共4组,含有8个方程,8个变量。首先计算正解,其正解是关于x,y,z,θ,xi(i=1~4)的非线性方程组。

(8)
利用连续法分析知,方程含有9个未知数,故其解理论上有29=512组。
设m=0.45 m,R=0.90 m,L0=0.50 m,β=60°,取L1=L2=L3=L4=600 mm=0.6m,代入程序中得到163组收敛解,其中有4组实数解,如表1所列。
现取表1中的第一组数据作为反解的初始值来验证该程序。同理对于上述非线性方程共4组,含有8个方程,8个变量。其反解是关于L1,L2,L3,L4,xi(i=1~4)的非线性方程组。
(9)
利用连续法分析知,方程含有8个未知数,其解理论上有28=256组,设m=0.45 m,R=0.90 m,L0=0.50 m,β=60°。先取:x=0.4 372,y=0.0 162,z=-0.1 469,cosθ=1,sinθ=0,代入程序中得到256组收敛解,其中有16组满足要求的解如表2所列。
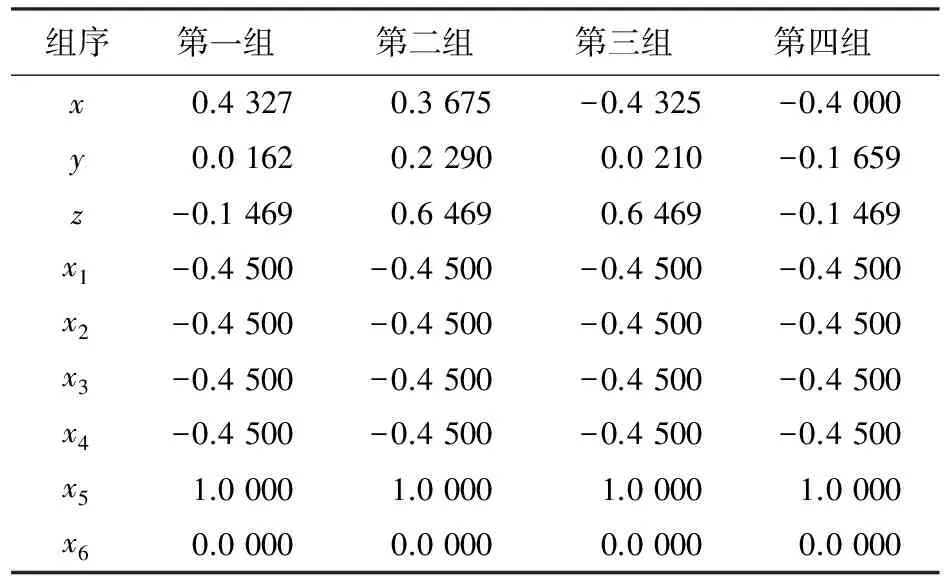
表1 正解中实数解值

表2 反解中满足要求的解
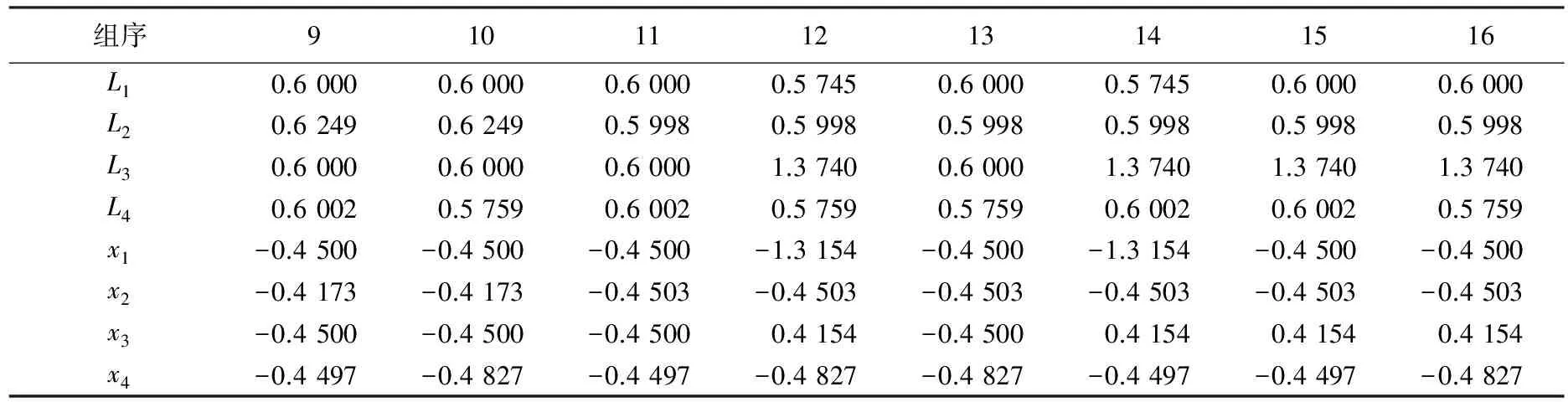
表2(续) 反解中满足要求的解
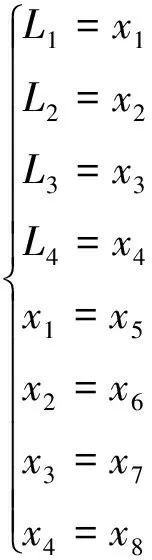
对于3-RPC机构非线性方程共3组,含有3个方程,3个变量。首先计算正解。
故令:px=x1,px=x2,px=x3
(10)
方程含有3个未知数,其解理论上有23=8组,取:a=0.60 m,b=0.40 m,L1=L2=L3=0.50 m,代入程序中得到8组收敛解,其中4组为有实数解,如表3所列。

表3 正解中实数解
同理取表3中第一组实数解代入程序中,含有3个方程,3个变量,令:l1=x1,l2=x2,l3=x3
(11)
方程含有3个未知数,其解理论上有23=8组,
取a=0.6,b=0.4,px=0.4,py=0.2 309,pz=0.4 583,代入程序得到8组收敛解,其中1组实数解为:l1=0.5 000,l2=0.5 001,l3=0.5 000。
通过正反解比较知,正解的数据反解数据中,其偏差的数量级在10-4~10-5之间,可见Matlab在实际求解复杂并联机构的正反解时精度足够高,满足对动力学分析精度的要求,并且求解速度快,该程序还可重复使用,有效的为我们对于不同的机构的正反解提供了一定的理论和实践。
5 结 语
对于较复杂结构的并联机器人来说,其运动学分析一直是机构分析的基础与难点,特别是对于并联机器人的正解而言,其存在的解有多种,常规的方法求解速度慢、效率低并且可能不能求出所有的解。通过实例证明了利用Matlab编制通用程序对并联机器人的正反解进行求解速度快、精度高。该方法对于同类问题具有普遍意义,为机构运动学分析提供了便利。并且Matlab还提供了良好的外部程序接口,便于这些正反解的计算结果直接导入到机器人的控制系统中,为机构的后续分析研究提供了理论基础。
[1] 黄 真,孔令福,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[2] 张 曙, Heisel.U. 并联运动机床[M].北京:机械工业出版社,2003.
[3] Tian Y L,Shirinzadeh B J. Performance Evaluation of a Flexure-Based Five-bar Mechanism for Miero/Nano Manipulation [C].IEEE/ASME International Conference on Advanced Intelligent Mcehatronies,Singapore,2009:76-81.
[4] 姜 虹,贾 嵘,董洪智,等.六自由度并联机器人位置正解的数值解法[J].上海交通大学学报,2000(3):351-353.
[5] 裴葆青,韩先国,陈 五,等. 基于传感器的6-DOF并联机构运动学正解[J].北京航空航天大学学报, 2005,31(4):421-424.
[6] 刘安心.机构运动综合理论与位置分析的理论及实用方法研究[D].南京:东南大学,1994.
[7] 王沫然.MATLAB与科学计算[M].北京:电子工业出版社,2012.
[8] 李永泉.一种新型4-RPTR并联机构的运动学分析及仿真研究[D].秦皇岛:燕山大学,2005.
The Study of Kinematical Modeling Method for a Kind of Parallel Manipulators
LIU Ping-an,WANG Quan,LIAO Xiao-dong
(SchoolofMechatronicsEngineering,EastChinaJiaotongUniversity,NanchangJiangxi330013,China)
Parallel manipulator has a variety forms, the structure is complex, and its kinematic model mostly is nonlinear equations, their setting up and solving are often very complicated, so to get the position of closed-form solution is even more difficult. In this paper, through numerical modeling method, by using the continuous method and Matlab programming has a good effect to solve the complex problem of kinematics of parallel manipulator. It provides an effective way for the parallel robot kinematics modeling and solving.
parallel manipulator; position analysis; continuous method; Matlab
2013-12-02
刘平安(1962-),男,江西萍乡人,教授,主要从事机械设计、机构学、机器人机构学方面的研究工作。
TH112
A
1007-4414(2014)01-0114-05