无人机飞行控制与管理系统动态仿真测试技术研究
2014-07-09李艳雷周莉莉
张 卿,李艳雷,周莉莉
(北京机电工程研究所,北京 100074)
0 引言
自海湾战争后,无人机受到各国军界的高度重视,发展趋势迅猛。无人机可做各类武器装备模拟训练的靶目标,可做电子侦查和预警,可做电子干扰与反辐射攻击,可做武器制导与通讯中继,可做目标指示与战场目标毁伤效果评估,还可直接携带武器进行作战攻击。因此,无人机在战争中具有非常重要的战术意义与战略意义。
进入21世纪,随着微电子、微机电技术、信息技术、智能技术、仿生科学、新型材料技术和航空技术的飞跃发展,无人机的使用范围由军事领域拓展到大地测量、农业勘测、交通民用导航、边境巡逻与控制、自然灾害监视与救援等民用领域。
无人机是无人驾驶的,一般采取自动飞行控制系统来控制。1912年,美国爱莫尔·斯派雷(Eimer Sperry)研制成功了世界上第一台自动驾驶仪,从而开创了自动飞行控制的先河[1]。自60年代,自动驾驶仪功能扩展,到目前发展成具有飞行控制、任务设备管理等复杂功能的飞行控制与管理系统。
无人机最大的优势是能够回收,实现可重复使用,并且在飞行过程中可响应地面操控,执行变化的飞行任务,其飞行控制与管理系统要比普通飞行器的控制系统更为复杂。因此,为了确保高可靠性,对其飞行控制与管理系统的测试要求比普通飞行器的测试要求高。
从20世纪50年代至今,各类飞行器所采用的测试方法和完成的测试内容来看,主要是采用“开环+静态”的方法,实现分立部件的单元测试和部件装机后的整机综合测试[2]。这对无人机实际飞行过程中的动态性能无法验证,对飞行中风干扰等环境干扰因素和传感器失效后的无人机飞行情况也无法模拟,对飞行过程中测控链路人机交互工作的正确性无法检验,也就不利于有针对性的进行飞控控制与飞行管理策略修正等。
因此,需要利用仿真技术构建接近真实的无人机飞行工作环境,实现对飞行控制与管理系统全面深入的闭环动态测试,检验无人机飞控系统软、硬件系统工作协调性、正确性,验证飞行控制与飞行管理等功能的合理性与适应性,显得尤为必要。
本文介绍了无人机飞行控制与管理系统核心组成部分——控制与管理计算机的动态仿真测试技术,详细阐述针对控制与管理计算机的故障注入与测试方法;并结合工程实践给出了无人机飞行控制与管理系统动态仿真测试环境构建原则和动态仿真测试的实施方法。
1 无人机飞行控制与管理系统组成与功能
1.1 系统组成
无人机飞行控制与管理系统 (以下简称飞控系统),通常由传感器子系统、控制与管理计算机、伺服作动子系统以及地面操控与显示终端组成,如图1 所示[3]。

图1 无人机飞控系统一般组成Fig.1 The flight control and management system composition of UAV
传感器子系统可包括:1)飞行器位置/速度传感器,如GPS接收机、惯性导航设备或惯性/卫星组合导航设备;2)空速、高度传感器,如大气机、动/静压传感器、无线电高度表等;3)姿态/航向传感器,如惯性导航设备、自动驾驶仪、垂直陀螺和磁航向传感器等;4)角速率传感器,如角速率陀螺等。
伺服作动子系统包括升降舵、方向舵、控制副翼、其它按要求进行偏转的舵机及其控制器和发动机油门控制器等。
地面操控与显示终端包括任务规划、综合遥测信息显示、遥控操纵及飞行状态监控等。
控制与管理计算机 (以下简称控制计算机)由系统硬件和综合控制软件组成,主要担负信息采集与处理、导航解算与飞行控制、任务管理与火力控制、信息监控与控制输出等工作,在无人机飞控系统中处于核心地位。
1.2 系统功能
无人机飞控系统功能可分为飞行控制、飞行管理、任务设备管理和火力控制。
飞行控制功能是飞控系统最基本功能,通常包括:俯仰/滚动/偏航姿态控制与稳定、高度控制与稳定、侧向偏差控制与稳定、速度控制与稳定、爬升/下滑控制、回收/着陆控制等控制模态。
飞行管理功能一般包括:飞行任务管理与规划、机载设备故障判断与处理、导航解算、遥控遥测管理等。
任务设备管理主要包括对任务设备的控制管理与工作状态监测。
火力控制通常是侦打一体无人机具备的功能,主要包括对挂载武器状态检查与监测、目标装订、发射控制以及应急投放等。
2 控制计算机动态仿真与测试技术
控制计算机在无人机飞控系统中处于核心地位,只有确保控制计算机的可靠性,才能保证无人机安全、正确地执行任务。因此控制计算机装机前的动态仿真测试是必不可少的。动态仿真测试的前提要构建控制计算机工作的外部环境,在此基础上开展常规模式及故障注入模式下的动态仿真。
2.1 控制计算机动态仿真与测试系统
无人机控制计算机动态仿真与测试系统,其内部集成了除控制计算机以外所有与控制计算机交连的分系统模型模拟单元,这些模拟单元在硬件接口上保持了与真实分系统硬件接口的一致性,形成专门针对控制计算机动态仿真与测试的半实物仿真环境,其工作原理图如图2所示。通常称该系统为仿真测试仪。
(1)系统组成
仿真测试仪主要由系统硬件和主控软件两大部分组成[4],如图3所示。
系统硬件是仿真测试仪工作的基础,它的主要功能是完成仿真测试仪与控制计算机之间信号的传输与交互等;主控软件是仿真测试仪的核心,具有无人机各分系统模型解算、接口信号交互、仿真测试数据实时显示与存储、仿真测试流程控制等功能,能够满足无人机控制计算机的仿真测试需要。
(2)工作模式
仿真测试仪主要包括如下工作模式:
1)数学仿真:根据空间航迹数学模型,用计算机编程实现在理想情况下和有干扰情况下机体的动力学和运动学模型解算以及控制系统解算的超实时数学仿真,数学仿真结果可作为验证仿真测试仪系统工作正确性的判据之一。
2)物理仿测:控制计算机参试情况下,通过机体动力学和运动学模型,结合接口通讯模拟功能,实现正常工作流程下控制计算机软、硬件动态仿真测试。
3)故障注入与测试:控制计算机参试情况下,可设置故障类型、属性等,并能实时注入故障,实现故障发生时异常流程下控制计算机的动态仿真测试。
4)系统自检:完成仿真测试仪的接口工作正确性检查和各项性能指标检查,以确保仿真测试仪系统进行仿测前处于可用状态。
综上所述,仿真测试仪具备控制计算机的所有信号交联关系,能够实时模拟控制计算机外部环境的工作过程和时序,既可以作为综合控制软件动态调试环境而提供有效的调试手段,也可以作为控制计算机的综合检测设备以仿真方法实现动态测试。
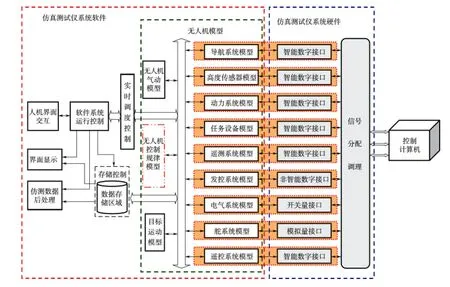
图2 仿真测试仪系统工作原理图Fig.2 The working principle of the simulation tester system
2.2 控制计算机动态仿真与测试
(1)常规动态仿真测试
控制计算机常规动态仿真测试,是在正常工作流程和任务约束下检验控制计算机信息采集与处理、导航解算与飞行控制、任务管理与火力控制、信息监控与控制输出等功能的测试手段。
为解决这个难题,蔡元培采取了折衷办法。他在2月16日致信许寿裳,一方面表示同意为但采尔预发2月份的月俸,另一方面则向同事们解释:
通过仿真测试仪实施动态仿真测试的方法为:
1)通过系统自检工作模式,检验仿真测试仪系统性能和接口工作正确性,确保处于可用状态;
2)利用仿真测试仪数学仿真模式得出标准航迹飞行数据;
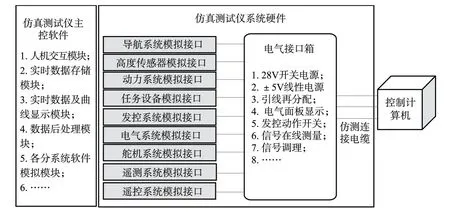
图3 仿真测试仪系统组成Fig.3 The composition of the simulation tester system
3)进行仿真测试仪与控制计算机实物对接的物理仿测,得到仿真测试仪遥测接口接收的控制计算机遥测数据以及实时飞行航迹运算结果 (统称实时仿测数据);
4)通过实时仿测数据与标准飞行航迹数据的对比分析,能够检验与定位控制计算机是否存在问题。
(2)故障注入与测试
在无人机实际飞行过程中,由于外界环境影响,飞机各个部分均有可能出现随机故障,这就要求飞控系统控制计算机能够及时做出反应并进行处理,以便最大程度地降低损失。因此,对控制计算机可靠性的检验仅通过常规动态仿真测试是远远不够的,还需要在动态仿真过程中人为注入故障,以检测控制计算机的故障处理能力。
仿真测试仪故障注入与测试工作模式具有如下功能:
1)故障设置:能够根据用户要求灵活设置故障类型,可选择的故障尽可能包括各类常见故障,如:惯性导航设备信号丢失、高度传感器信号丢失、舵机卡死、发动机油门控制器失灵、电源电压不稳等5。
2)故障注入:按照用户要求在特定的时间向特定的故障位置注入规定数量的故障,用户可控制故障注入的起始时间、结束时间,并可在此过程中随时监视故障注入情况。
3)实时数据I/O传输:能够将注入故障的各类信号实时送入控制计算机中。
4)试验结果保存与分析:能够以文件形式保存故障注入动态测试试验数据,供试验者分析,以评判控制计算机故障响应与处理能力。
在仿真测试仪故障注入与测试工作模式下,通过软件方法可实现与控制计算机交联的外围设备硬件故障模拟。故障注入灵活可调、易实施。目前已成功应用于多型号无人机控制计算机动态仿真测试试验中。
以某型无人机为例,其控制计算机具有双路备份机载测控接口,通常情况下以A通道接收遥控指令并发送遥测数据信息,而当A通道异常时,控制计算机自动启用B通道执行该功能。在对该控制计算机动态仿真测试中,设定了机载测控接口A通道遥控指令丢失的故障用例,故障模型为Data→no Data,故障属性为RS-422串口永久性故障,故障注入流程如图4所示。
经仿真测试仪动态仿真测试后发现,在注入故障后,控制计算机能够迅速检测到故障,并自动切换B通道接收遥控指令并发送遥测数据,确保了正确响应遥控指令执行任务设备管理和火力控制等任务,并及时下传遥测数据供试验人员进行状态监测,将故障造成的影响减小到最低。
3 飞控系统动态仿真与测试技术
3.1 飞控系统动态仿真与测试系统构建
无人机飞控系统动态仿真与测试是包含控制计算机、传感器子系统、伺服作动子系统等在回路的动态仿真与测试,通常称为飞控系统半实物仿真试验,能够为飞控系统控制计算机、各类传感器及伺服作动系统等被试对象营造更接近实际飞行的动态测试环境。
飞控系统半实物仿真试验系统由仿真软件、仿真设备、飞控系统被试对象组成,通过实时光纤通讯设备构建为半实物仿真试验网络。
仿真设备除负责仿真模型解算与试验调度控制的仿真机,负责信号转换与数据通讯的接口计算机外,还包括各类传感器工作特性模拟设备,如:运动特性模拟设备、力矩特性模拟设备、高度特性模拟设备、大气温度和压力模拟设备、卫星导航模拟设备、多普勒雷达模拟设备等。
飞控系统半实物仿真试验系统构建以被试对象和试验目的为原则,以模块化搭积木的方式组合成相应的半实物仿真试验系统。
以某无人机为例,飞控系统被试对象为控制计算机、惯性/卫星组合导航设备、大气数据计算机和舵系统。为了检验实际飞行中各传感器子系统的工作性能,检验伺服作动机构的实际执行能力,检验控制计算机的飞行控制与飞行管理等功能以及验证飞控系统各设备的工作协调性、正确性。以仿真机、接口计算机、三轴仿真转台 (运动特性模拟设备)、总温总压模拟器 (大气温度和压力模拟设备)、舵机负载模拟器 (力矩特性模拟设备)为仿真设备,并运行仿真机软件、接口机软件,通过光纤网络和机上仿真测试电缆连接被试对象构成飞控系统半实物仿真试验系统,如图5所示。

图4 故障注入流程图Fig.4 The flow chart of fault injection
3.2 飞控系统动态仿真与测试
飞控系统的动态仿真与测试,最大的功能用于飞行控制参数调试,根据仿真测试结果对最初的设计进行调整、完善,循环进行多次仿真后得到理想的控制系统参数。另外,还可以用于控制计算机与各类传感器和伺服作动子系统联合工作时特殊处理功能 (如组合高度修正算法等)的检验。
利用半实物仿真试验系统中的各类仿真设备实现对整个飞控系统被试对象的动态仿真与测试:
1)通过仿真机软件实现常值风、突风、紊流干扰、常值力矩干扰、空气动力系数拉偏等典型干扰剖面动态仿真,检验飞控系统控制参数的适应性和鲁棒性,验证飞行控制方案和控制参数的合理及正确性。
2)在各类传感器工作特性模拟设备中,可以人为模拟故障,检验传感器对异常环境的应急响应能力,进而检验飞控系统的故障处理流程。
3)通过接口机软件也可以注入故障 (方法与仿真测试仪故障注入与测试类似),达到对整个飞控系统故障处理能力的检验,并验证飞控系统各软、硬件的工作协调性、安全性和可靠性。
4 结束语
飞控系统对无人机的重要作用不言而喻,飞控系统动态仿真与测试已成为无人机系统研制过程中必不可少的研试验证手段。无人机上越来越多的关键设备参与到飞控系统的动态仿真测试回路中,以仿真测试仪为关键设备,已实现了飞控系统与发动机实物全机参试的动态仿真与测试。后续飞控系统动态仿真与测试环境将向着更加接近真实的天地一致性趋势发展。
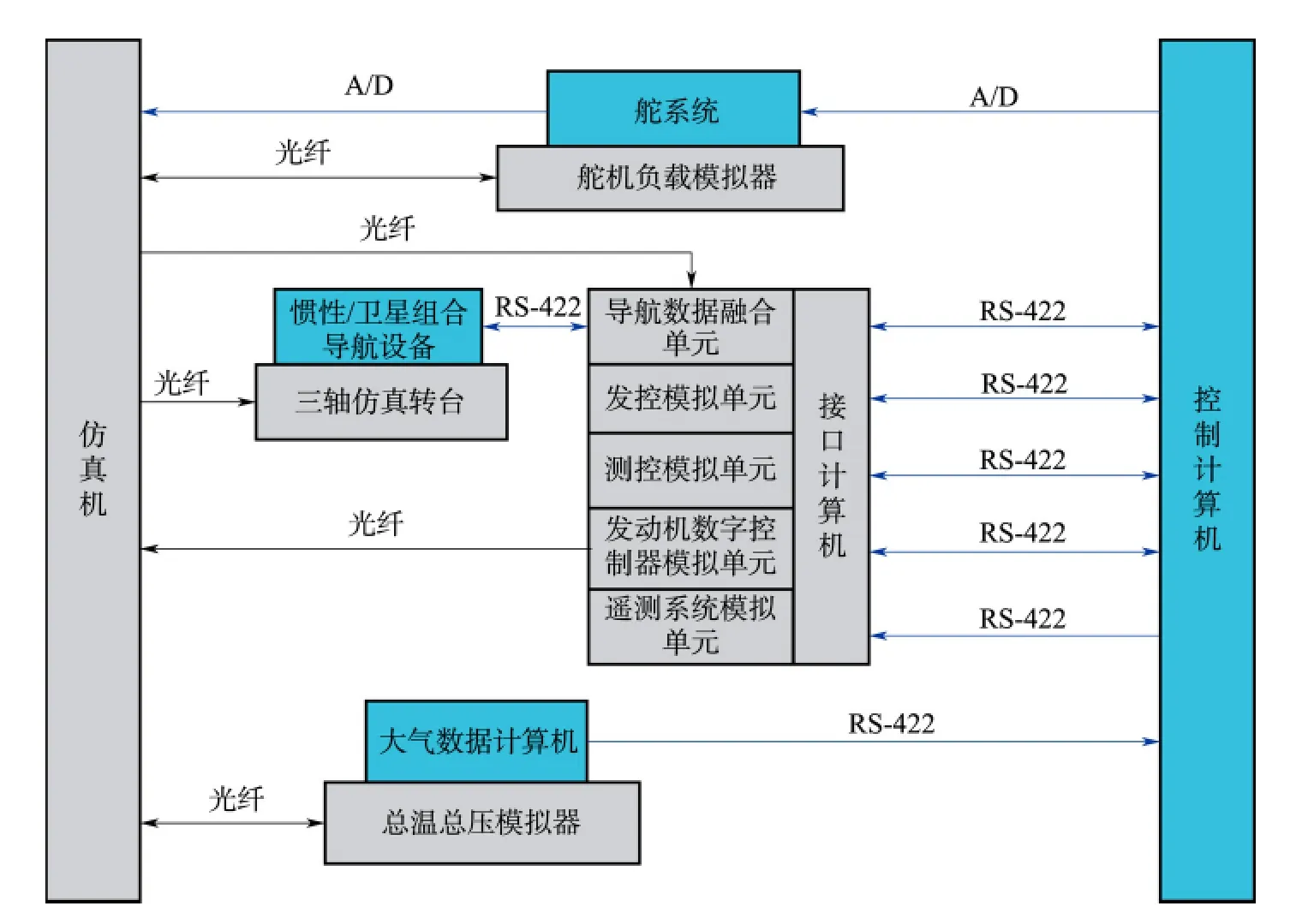
图5 飞控系统半实物仿真试验组成Fig.5 The composition of HWIL simulation for flight control and management system
[1]王松辉.基于dSPACE的无人机飞行控制系统半实物仿真研究[D], [硕士学位论文],南京,南京航空航天大学,2008.[Wang Song-hui.Research on Hardware-in-Loop Simulation for flight control system of UAV based on dSPACE[D].Nanjing,Nanjing University of Aeronautics and Astronautics,2008.]
[2]薛鹏,肖前贵,高艳辉.某无人机飞控系统半实物仿真平台设计 [J].现代电子技术.2012,35(13):111~118.[Xue Peng,Xiao Qian-gui,Gao Yan-hui.Design of hardware-in-the-loop simulation platform for a certain UAV flight control system [J].Morden electronic technique.2012,35(13):111 ~118.]
[3]王宏伦,王英勋.无人机飞行控制与管理[J].航空学报挥控制.2008,29.[WANG Hong-lun,WANG Ying-xun.Flight Control and Management System of Unmanned Aerial Vehiclesl,[J],Journal of Aviation 2008,29.]
[4]沈超,郭卓锋,张卿.基于CPCI总线的某飞行器仿真测试仪系统设计[C].2010年全国仿真技术学术交流会.[Shen Chao,Guo Zhuo-feng,Zhang Qing.Design of simulation and testing system for aircraft based on CPCI bus[C].The national simulation technology of academic exchange,2010.]
[5]张贝蓓,陈欣.无人机动态测试中的故障注入研究 [J].工业控制计算机,2005,18(5):9~11.[ZHANG Beibei,CHEN Xin [J].Study on Fault Injection of UAV's Dynamic Testing,industrial Control Computer,2005,18(5):9~11.]
