某机载光电吊舱热环境下光轴平行性建模与分析
2014-07-04迟圣威杨晓强徐红伟
迟圣威,朱 镭,杨 光,杨晓强,徐红伟
(西安应用光学研究所,陕西 西安710065)
0 引言
多光轴校准一直是机载光电稳瞄系统的关键技术,包括光轴准直和光轴平行性,光轴准直可依靠光学调校来实现。光轴平行性则受到传感器安装载体材料的均匀性和不稳定性、振动效应、装配应力和环境温度等多种因素的共同作用[1]。在实际的光轴机械调校过程中,通常利用某一传感器的光轴作为基准,调整其他传感器的光轴,使它们按平行性要求与基准保持在一定误差范围内。所以,对于多光轴系统,光轴之间的平行度是非常关键的指标。根据场地条件的不同,提出了多种检测光轴平行性的办法[2]。不过这些工作的不足之处在于,都是在产品加工和装配完成后进行的。而在设计阶段更多的是凭借以往的设计经验,没有其他的考核手段,且由于系统工作温度范围大,除去传感器自身的光轴会在热环境下产生偏移外,光具座热变形也会带来光轴偏移。从以往的经验来看,在酷热和严寒环境下光轴的偏移量较大,也最难克服。因此,研究热环境下的光轴平行性问题具有重要实际意义。根据模型的特点和检测方法的启发,提出一种仿真模型,用来研究某机载光电吊舱的光具座热变形对传感器光轴平行性的影响。
1 几何模型
光具座是光电传感器的直接载体,结构形式为平板结构。3个传感器分别安装在光具座的两侧,为了保证光具座加工的平面度和便于装配的要求,按传感器的尺寸在2个平面上加工多个1 mm凸台作为安装面。同时,通过上下两片耳朵状的法兰固定在俯仰框架上。3个传感器重量分别为红外传感器6 kg,CCD传感器2.3 kg,激光传感器6 kg。
光轴的建立是设计的重点。本来多数传感器不止一个窗口,各窗口应有自己的光轴,不过在这里不考虑传感器自身的因素,仅考虑光具座对光轴的影响。为此,每个传感器只用一个光轴模拟就足够了。从CAD软件中获取各传感器在整体坐标系下的质心位置。把沿传感器纵向并通过质心的直线作为传感器的模拟光轴。这样的选择不仅物理概念清晰,而且为后面的仿真计算带来了便利。光具座的装配关系如图1所示。

图1 光具座装配关系
2 有限元模型
2.1 网格划分与单元的选择
由ANSYS自动生成的高阶四面体单元会在凸台等几何特征附近细化大量的网格。加上在后期生成大量的约束方程,超出ANSYS软件可调用的内存上限导致求解失败。而一阶四面体是常应变单元,精度较低。综合考虑精度、计算的成本和可行性,采用一阶六面体单元。
在CAD软件中处理完模型后,用中间格式导入Hyper Mesh软件,将实体分割为可映射的几何体。首先生成面网格,按照单元最大角度、单元纵横比和雅可比值等指标控制网格质量。随后用体映射方法拉伸四边形网格高质量的六面体网格。最后通过网格连续性检查来完成,结果如图2所示[3]。

图2 Hyper Mesh生成的六面体网格
2.2 材料属性
把生成的网格导入ANSYS软件继续完善前处理。通常,在仿真过程中会将热膨胀系数设为常量,事实上应当考虑温度范围较宽时会带来误差。因为金属材料的热膨胀系数会随着温度变化而改变[4]。根据考察的温度范围和求解的工况条件,可以分成两段并赋予相应的热膨胀系数来提高求解精度。其中,高温段为20~60℃;低温段为20~-40℃,材料的物理属性如表1所示。

表1 铸铝光具座的材料属性
2.3 边界条件
光具座通过螺栓与外部框架联接,在仿真分析时做如下处理:对上下3个螺钉孔内壁位置附近的节点施加固定边界条件,来模拟两者之间装配关系。
2.4 光轴的建模
在传感器的质心位置创建mass21质量单元,其有6个自由度可直接表示模拟光轴的偏转角度。不过它一般只能在动力学分析中才能激活其质量属性,为此,这里附加一个重力场,把结构的自重考虑在内,以解决上述问题。
2.5 刚性区域的建立
在质量单元和对应的安装凸台之间运用刚性区域功能建立刚性约束关系,连接过程如图3所示。最终应该选择安装凸台上全部节点,需要注意的是,所选的三维实体单位只有3个自由度,在设置自由度时只需关联平动自由度即可,否则会警告信息超出上限而中止求解。
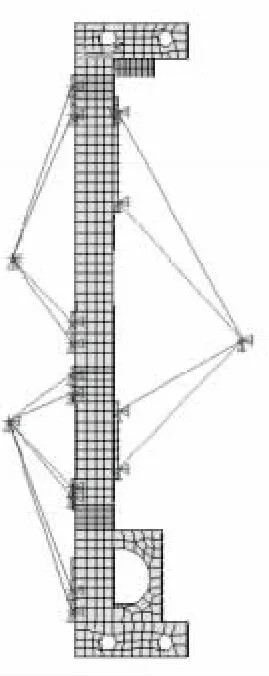
图3 光轴和刚性区域的建立过程
2.6 光轴基准的选择
考察多传感器之间光轴的平行性关系,首先要选择光轴平行性的基准。根据实际工作中光轴调校的经验,常用大口径平行光管法。对于带有激光传感器的光具座,都是采用激光传感器的光轴作为光轴平行性的基准(参考图1),根据吊舱的运动方式,横滚轴的偏转主要引起的是像的旋转,而不影响光轴的指向[5],仅需要考察光轴在方位(图2,Y 轴)和俯仰(图2,Z轴)方向的偏转角度即可[6]。
2.7 温度载荷的施加
除去传感器的安装方式对结构热变形限制[7],影响热变形的主要因素还有温度的增量和热膨胀系数。在这里,温度的增量指的是环境温度和参考温度之差。参考温度可以认为是材料热膨胀为零的基点,根据不同的材料有不同数值,一般金属材料选择室温即可,这里设置为20℃,而极限工作环境分别为60℃和-40℃。
3 静热耦合分析
常见的热应力计算包含3种方法,分别是直接加载温度载荷、耦合法和间接方法。后2种方法需要求解系统温度场作为外部的载荷,进而求解结构的应力和变形。两者区别仅仅是根据热效应和力学效应的耦合程度,是同时选择求解力场和温度场,还是先求解温度场后求解力场。在这里温度场分布为已知量,问题就简化成一个纯粹的热弹性力学问题。所以选择直接加载温度应力。因为在各向同性材料中热膨胀系数不随方向改变,所以它在3个方向上的正应变相同,不会产生任何剪应变。同时,在2个温度范围内分别假定热膨胀系数α为常数,热效应在弹性体产生的形变分量为:

热效应和力效应引起的总形变分量为:

用数值方法求解上述微分方程组,就可以得到热弹性力学的应变和位移。
4 结果分析
首先,仅考虑传感器自重本身的影响,得到常温下光轴的偏转角度如表2所示(相对于激光传感器)。从所得到结果的单位就可以看出,光轴在自重下的偏转角度是在给定温度热变形下的偏转角度的千分之一左右。也就是说,对于完成配平的光具座而言,自重对结果的影响极小,可以忽略。

表2 常温下光轴的偏转角度 μrad
接着,计算结构自重和温度载荷共同作用下光具座的变形情况。为了满足装配和减重的要求,光具座并不是厚度为常数的均匀平板,导致其热胀冷缩的量值也不均匀,这点从放大变形的角位移云图(如图4和图5所示)上得到了反映,厚度较小的位置出现了类似翘曲的形式。这种厚度变化和安装孔位的位置进一步制约了热变形下光轴平行性的提高。不过,由表3和表4(相对于激光传感器)的结果可以看出,在60℃高温和-40℃低温下,不论是CCD传感器的光轴,还是红外传感器的光轴,在方位和俯仰2个方向,与激光传感器光轴的最大偏转角度均低于0.25 mrad。在方位和俯仰的耦合方向上,最大偏转角度小于0.26 mrad。

表3 60℃时光轴的偏转角度 mrad

表4 -40℃时光轴的偏转角度 mrad
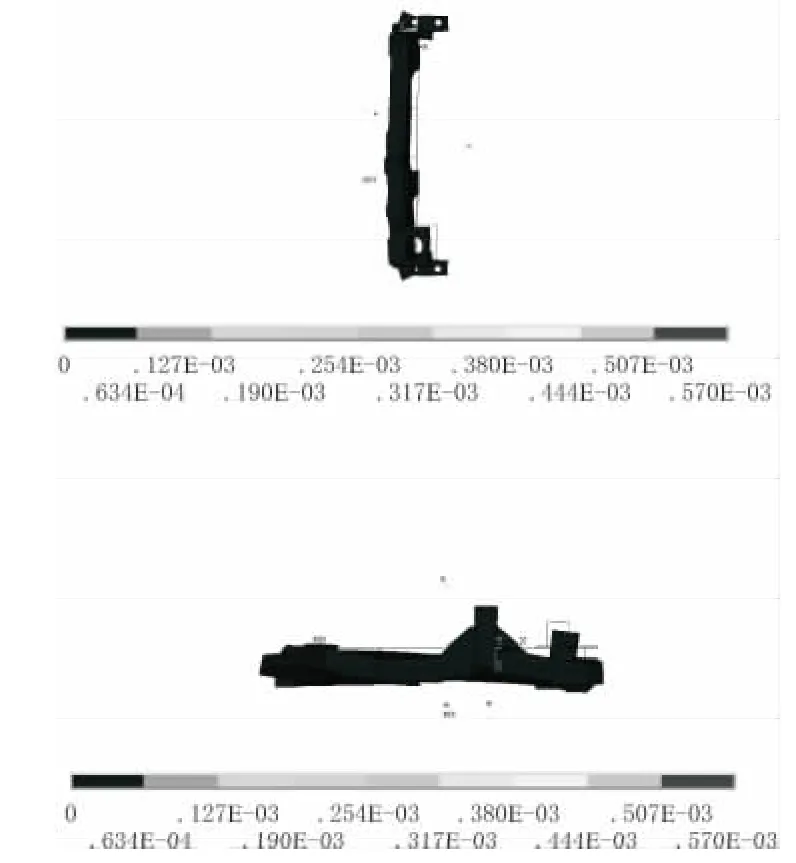
图4 60℃环境下光具座角位移云图

图5 -40℃环境下光具座角位移云图
5 考核指标
实际飞行考核的是位于2 km外的4 m×4 m的标准目标,由传感器最大的光轴偏转角度(0.252 mrad),引起的误差约为0.504 m。对于标准目标,这样的误差是可以接受的,其结果满足吊舱在精确打击任务中的使用要求[8]。
6 结束语
由仿真结果看出,按保守情形计算,3个模拟光轴的平行性最大误差仍然满足目前使用要求。并且,与热区和寒区的外场试验中的光轴平行性状态接近。计算结果得到了较为理想的验证。
在下一步的工作中,如能进一步对光具座优化外形,增加重量,改进传感器的安装位置,或采用钛合金等热膨胀系数更小的材料,可获得更高的光轴平行度。同时,若在建模时能考虑摩擦、间隙等非线性效应,建立更为准确的模型,将会得到更加符合实际的结果。
[1] 马世帮,杨 红,杨照金,等.光电系统多光轴平行性校准方法的研究[J].应用光学,2011,32(5):917-921.
[2] 杨 旸.多光轴光学系统光轴平行性校准技术研究[D].西安:西安工业大学,2012.
[3] 王钰栋,金 磊,洪清泉,等.Hyper Mesh & Hyper-View应用技巧与高级实例[M].北京:机械工业出版社,2012.
[4] 费业泰,等.机械热变形理论及应用[M].北京:国防工业出版社,2009.
[5] 凌 军,刘秉琦,赵熙林.几种光轴平行性测试方法的比较与探讨[J].应用光学,2003,24(1):43-44.
[6] Laskin R A,Sirlin S W.Future payload isolation and pointing system technology[J].Journal of Guidance,Control,and Dynamics,1986,9(4):469-477.
[7] 叶 露,沈湘衡,刘则询.强激光与红外光学系统光轴平行性检测方法的讨论[J].应用光学,2007,28(6):760-763.
[8] 郭 城,李 梅,王 静.光电侦察系统的转台轴系正交偏差对系统定向精度的影响分析[J].应用光学,2009,30(S1):16-19.
