吹塑机机构的设计与运动分析
2014-06-27高东强
高东强, 韩 昆, 孙 倩
(陕西科技大学 机电工程学院, 陕西 西安 710021)
0 引言
随着现代药品行业的快速发展,药品包装的自动化程度越来越高,目前国内外都在积极研发和对包装机构进行不断的更新和改进[1].在整条包装线中吹塑机构是重要的环节,我国的泡罩机的吹塑机构主要分为气压推动和凸轮向上推动两种.气动间歇给进会对模具产生较大的冲击、振动和磨损[2];凸轮向上推动的结构在整个运动过程中都要克服模具自重,而且还要有较好的安装位置精度,如果安装有误差就会是模具闭合不好或者受力过大,因此需要在满足生产要求的前提下设计更好的机构来改善它们的不足.
吹塑机构是一个间歇的机械运动,从运动特点上分析,一般都是选凸轮的运动方式[3,4].因此凸轮机构系统设计的好坏直接影响整个吹塑机构的受力,进而影响成型模具的寿命和工作效率.
Solidworks具有强大建模功能,是美国Solidworks公司在总结和继承大型机械CAD软件基础上,在Windows环境下实现的第一个机械三维CAD软件[5],可以通过数学模型建模得到比较精准的模型.ADAMS软件是由美国机械动力公司开发的机械系统仿真软件,是目前世界上最具权威、使用范围最广的系统动力学分析软件[6].它们之间通过共享的交换文件(.x_t),将Solidworks建立的模型导入ADAMS中,最后实现对机构的动力学仿真分析.本文结合两种软件的优点完成对吹塑机机构的设计和运动分析[7].
1 结构设计
1.1 机构设计
本次设计的吹塑机机构主要由一套模具、凸轮,滚子、弹簧和别的辅助件等组成,如图1所示.
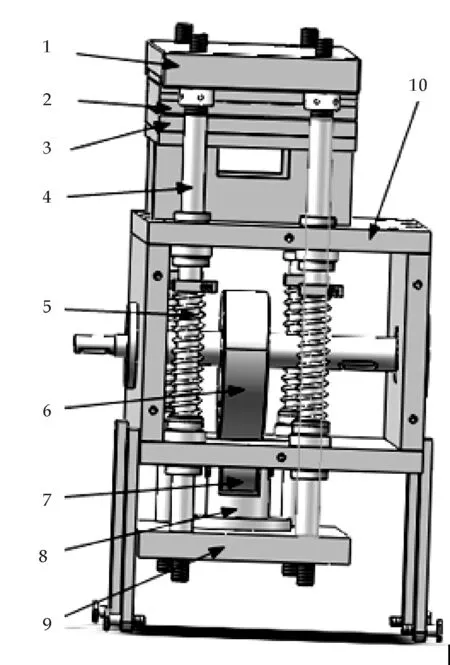
1.成型上底板 2.动模 3.定模 4立柱 5.弹簧6. 凸轮 7.滚子 8.滚子座 9.成型底板 10.机架图1 总装图
传统的滚子是向上运动,由于模具一般都比较重的,如果推动模具向上运动,这样凸轮就会克服较大的重力来完成运动.如果安装位置有误差,会出现模具闭合不好使吹塑漏气或者会使运动超程使受力增大.在此设计的机构中,凸轮推动滚子向下运动使模具闭合,弹簧的张力使模具分离.凸轮在整个运动过程中仅受弹簧的弹力.另外,在安装时可以超程安装,这样超程产生的力会被弹簧吸收,从而减少别的组件受力,还可以保证模具完全闭合.
1.2 工作原理
将定模固定在机架上,动模固定在成型上底板上,成型上底板通过4根立柱与成型底板固定在一起形成刚性的整体,滚子通过滚子座与成型底板形成刚性的整体,这个可以保证滚子、成型底板和动模同步运动.在运动过程中,凸轮匀速转动,升程时推动滚子向下运动使模具闭合,弹簧处于最大拉伸状态;凸轮的间歇运动给模具足够的闭合停留时间,使加热后的PPC在模具中完成吹塑成型;回程时弹簧收缩,在弹力的作用下使模具分离,在弹簧处于最小拉伸状态,凸轮的间歇运动给模具足够的分离停留时间,成型后的PPC被拉出去,这样完成了一次吹塑过程.
2 主要零件的设计
此吹塑机构主要由弹簧和凸轮组成的系统来完成运动,因此根据工况对弹簧和凸轮进行设计计算.
2.1 弹簧刚度计算
由于吹塑机的整个运动过程是由凸轮和弹簧共同完成的,所以弹簧的刚度是重要的参数,初步选取弹簧材料65 mn、弹簧丝直径d=4 mm、中径D2=31 mm、有效圈数n=13,弹簧刚度由公式(1)求解:
(1)

2.2 凸轮的数学模型
根据该机器在工作时PPC被加热情况和吹塑气压的控制情况,一般吹塑时间和成型后被拉出时间均约0.7 s设计.选取20 r/min,在整个运动过程中要尽量运动平稳,避免冲击,则可以选择修正弦、5次多项式或更高次多项式的运动规律,在考虑设计、加工成本和满足需要的综合考虑下,选用修正弦运动规律[8,9].

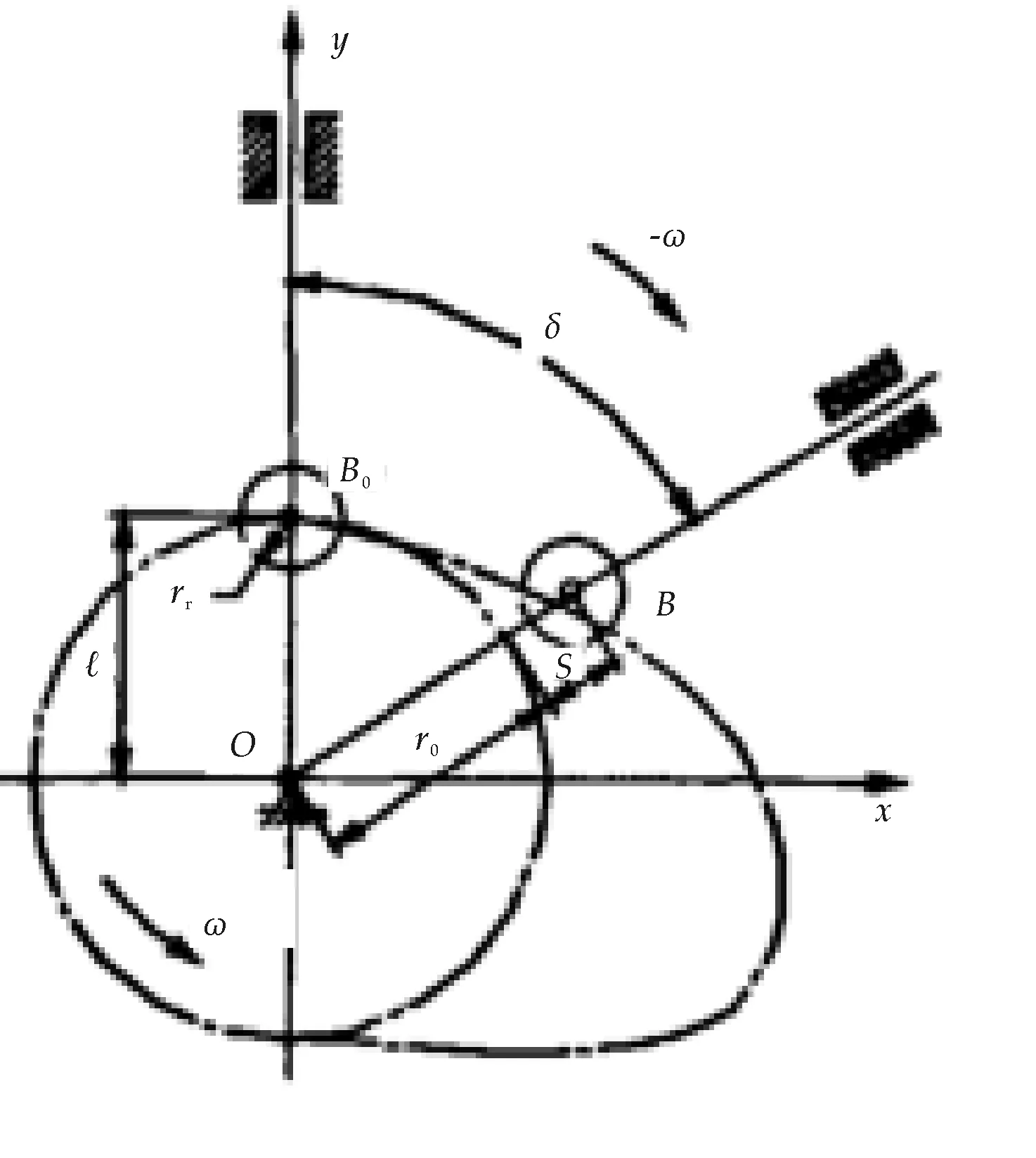
图2 凸轮机构运动简图
图2的B0点为凸轮理论廓线的起点.当凸轮转过δ角时,推杆响应的产生位移s.根据反转法原理,此时滚子中心应处于B点,则凸轮廓线在直角参数方程为[10,11]:
(2)
根据式(2)和推杆运动规律可以得到所要设计的凸轮理轮廓线方程[12].
当δ=0~90 °时,凸轮开始升程,凸轮理论廓线方程为

(3)
当δ=90 °~180 °时,滚子在距离凸轮回转中心最远位置不动,凸轮理论廓线方程为
(4)
当δ=180 °~270 °时,凸轮开始回程,凸轮理论廓线方程为

(5)
当δ=270 °~360 °时,滚子在距离凸轮回转中心最近位置不动,凸轮理论廓线方程为
(6)
2.3 建立凸轮实体模型
根据对心滚子凸轮不同阶段的参数方程,按1 °(换算成弧度)取一个点,运用Excel计算,从而得到凸轮轮廓线的X、Y的坐标值,因为凸轮廓线是平面曲线,所以在三维建模软件中将Z坐标值取为0,将这几段的坐标点按照从δ=0 °~360 °排列好,得到全部的坐标点数据,将该数据文件保存为后缀名为“.txt”文件.打开Solidworks软件,单击“曲线”命令选择通过XYZ坐标点做曲线的方式导入坐标点数据文件,生成曲线,通过向内平移一个滚子半径得到凸轮实际轮廓曲线,再拉伸得到三维实体凸轮,如图3所示.

图3 双简谐凸轮
2.4 装配模型并简化
吹塑机构中除去几个主要的零件外,其余零部件都是支撑机构或者辅助机构,对吹塑机的运动分析的影响不大可以略去.又因为成型底板、立柱和模具是刚性连接运动规律相同,弹簧在整个运动中又满足胡克定律,所以在Solidworks中简化后的装配模型如图4所示.

图4 装配简图
3 ADAMS环境下动力学仿真
将简化模型导入之后,还要对模型添加约束、驱动和外部载荷,为了使仿真更接近实际,考虑构件自身重力的影响,设置重力加速度[13].
3.1 外部载荷
简化后装配模型中成型底板处于升程的最大位置,弹簧处于最大拉伸状态,变形量为35 mm,满足胡克定律,由公式(7)求得:
F1=KX
(7)
式中:K为弹簧的刚度;X为弹簧的形变量;计算的F1=266.8 N.
经过计算,成型底板的重量为16.8 kg(即168.9 N),由材料力学知识求得分布到每个弹簧的力F2=42.1 N.
最终对每个弹簧所施加的预拉力
F=F1+F2=308.9 N(方向与重力方向相反)
3.2 定义约束和接触
为了更加真实的突出仿真效果,凸轮与滚子之间没有采用凸轮高副约束,而是在模型中加入接触力(contact),接触类型用solid-to-solid碰撞的形势,碰撞刚度系数为1.2E+005 N/mm,其它参数采用系统默认即可满足要求.根据吹塑机中凸轮机构实际运动情况和条件,对模型添加约束、驱动,为了使仿真效果更接近实际,考虑构件自身重力的影响,因此设置重力加速度.综合所有影响因素后,建立虚拟样机模型如图5所示.

图5 虚拟样机
3.3 运动学仿真
虚拟样机建立后,根据实际的工况取电机转速20 r/min.,设置仿真时间为10 s,仿真步长为0.1,分别对成型底板的Y方向(运动方向)的位移、速度、加速度进行求解分析,位移曲线如图6所示.

图6 成型底板Y方向位移
从动件在推程和回程阶段,速度和加速度变化相当剧烈,同时也恰恰真实地反映了凸轮机构的实际情况,通过对曲线进行滤波处理,得到较为清晰的速度和加速度曲线,如图7所示.

图7 成型底板Y方向速度和加速度
3.4 仿真结果分析
从图6成型底板位移曲线可以看出,当凸轮速度为120 °/s时,凸轮的升程、停歇、回程和停歇的时间都是0.75 s,证明弹簧的响应满足设计要求.升程位移为34.7 mm,偏差为0.86%,在准许的范围之内,故成型底板的运动位移曲线满足运动要求,弹簧刚度满足要求.
从图7可以看出,在刚开始的时间里曲线的突变较大,随着时间的推移逐渐平稳在一定范围内,这和机构实际的运动趋势吻合.成型底板最大速度vmax=0.093 m/s,而曲线的最大速度为0.092 4 m/s,基本相同.由于该机构是在弹簧和凸轮的共同作用下完成的,所以加速度与凸轮的理论加速度有差异,但也在一定的范围内变化并趋于稳定,可以认为满足要求.通过分析可以认为成型底板的速度曲线和加速曲线满足要求.
推程时的最大压力角由公式(8)得:
(8)
αmax=16.8 °≤30 °.
由以上的分析可证明此机构的设计满足要求.
4 实际应用
该吹塑机构在某药品企业的平板泡罩包装机械上已经得到了应用,如图8所示.

图8 物理样机
要求:模具是针剂包装的PPC托,吹塑气压0.7 Mpa,加热温度128 ℃,转速20 r/min,成型率大于95%,实验结果如表1所示.该实验证明:该机构在转速小于26 r/min时可以按要求很好地完成工作任务.

表1 成型率
5 结束语
对该吹塑机构建立弹簧和凸轮的数学模型,并在Solidworks环境下结合Excel更加精确地设计出实体模型,在ADAMS中仿真得到运动曲线,通过分析运动曲线和压力角证明此吹塑机构的设计满足要求.又通过该机构在某企业的平板泡罩包装机械上的实际应用,证明该机构可以按要求很好的完成工作任务.
[1] 胡 伟,胡国清,魏 昕,等.吹瓶机中机械手凸轮曲线解析计算的研究[J].机械设计与制造,2009,47(4):183-185.
[2] 欧阳资恩,胡 蓉.REV100注塑-吹塑机合模机构设计分析[J].塑料科技,2007,35(4):66-69.
[3] 唐 琼.基于ADAMS的凸轮机构分析与动态仿真[J].安徽理工大学学报(自然科学版),2012,30(4):22-24.
[4] 王 东.基于Pro/E关系式的凸轮轮廓曲线精确设计[J].机械设计,2010,27(8):31-34.
[5] 江 洪,吉维峰.运用三维绘图软件SolidWorks改革工程图学教学的实践[J].工程图学学报,2004,25(1):109-113.
[6] 芮执元,程林章.基于Pro/E与ADAMS结合的虚拟样机动态仿真[J].现代制造工程,2005(1):56-58.
[7] 袁安富,相立峰.基于ADAMS和SolidWorks的印刷机凸轮传动系统的建模与仿真[J].制造业自动化,2010,32 (11):125-128.
[8] 廖祥兵,王 军,张立军.顶置凸轮轴凸轮型线的优化设计[J].内燃机学报,2001,19(6):588-592.
[9] 陈赛克,刘江涛.基于SolidWorks与Mastercam盘形槽凸轮的设计与数控加工[J].煤矿机械,2006,27(12):85-87.
[10] 刘善林,胡鹏浩,王会生.基于Solidworks二次开发的凸轮廓线精确设计及运动仿真[J].机械传动,2008,32(5):46-48.
[11] 石永刚,吴央芳.凸轮机构设计与应用创新[M].北京:机械工业出版社,2007:21-50.
[12] 孙 恒,傅则绍.机械原理[M].北京:高等教育出版社,1989:345-347.
[13] 高东强,马金峰.基于PRO/E和ADAMS的新型快速成型机仿真分析[J].机械设计与制造,2012,50(11):145-147.