汽车线控转向系统中转角传感器的研究
2014-06-27秦书剑周海森贾林夕
刘 军,秦书剑,周海森,贾林夕
(江苏大学汽车与交通工程学院,江苏镇江 212013)
汽车线控转向系统中转角传感器的研究
刘 军,秦书剑,周海森,贾林夕
(江苏大学汽车与交通工程学院,江苏镇江 212013)
使用基于 Triaxis三轴霍尔原理的角度传感器芯片 MLX90316和单片机MC9S08DZ16,通过对软硬件进行设计,研制出成本低廉、测量精确、抗干扰性能好,具有一定智能的非接触式方向盘转角传感器。该传感器可以为线控转向系统的电控单元提供精确的方向盘绝对位置角度值,并且可以通过软件计算出方向盘转动角速度、角加速度值。
线控转向;角度传感器;方向盘转角;霍尔传感器;MLX90316;非接触式
随着汽车产量的增加,人们对汽车安全性、舒适性的要求也越来越高。汽车转向系统是影响汽车操纵稳定性、驾驶舒适性和主动安全性的关键所在,因此新型转向系统一直是汽车领域的研究热点之一。线控转向系统(steer by wire,SBW)同时兼有EPS和AFS的特征和功能。它取消了转向盘和转向器之间的机械连接,摆脱了机械转向系统的限制,不仅可以对转向系统的力传递特性进行设计,还可以对其角传递特性进行设计。因此,对提高“人-车-路”闭环系统的操纵稳定性、驾驶舒适性和主动安全性具有重要意义[1-2]。目前的研究主要集中在线控转向的控制策略方面,很少提及方向盘角度的获取方法[3]。实际上,方向盘角度的获取是线控转向的关键技术之一,它通过计算方向盘的转角位置和转角变化速率来识别驾驶员的操作意图,从而为线控转向控制单元提供控制动作的依据。本文设计了一种基于Triaxis三轴霍尔技术的非接触式绝对转角传感器。
1 绝对转角传感器的原理与结构
1.1 角度传感器工作原理
MLX90316芯片是传感器的核心部件。该芯片采用5 V供电,具有数字串行输出SPI功能,可输出14 bit计算后的角度信号,其测量精度达到了12 bit的角度分辨率。
平行于芯片表面的磁场(例如B∥)可被Triaxis三轴传感器的前端感应到。传感器的前端包括相互正交的2对传统平面霍尔元件和1个集磁片IMC(如图1所示)。B∥在2个分量方向上分别测量得到BX∥和BY∥。芯片通过集磁片(IMC)将这2个平行的分量(分别为BX∥和BY∥)变换为与之成正比的2个垂直方向上的分量(分别为 BX⊥和BY⊥),再通过芯片中的传统平面霍尔元件来测量这2个垂直分量。

图1 Triaxis传感器前端
当磁石(径向磁化)在芯片表面旋转时,MLX90316可以感应与芯片表面平行的磁场。如图2所示,芯片传感部分将产生2个正交的差分信号(正弦和余弦信号)。这2个霍尔信号利用经典的漂移电压消除技术(霍尔元件四相位旋转和斩波放大器),通过一个差分式全模拟处理链进行处理。经过处理的模拟信号由ADC转换为数字信号传输给DSP模块做后续处理。芯片的DSP模块采用16bitRISC微处理器,其主要功能是对2个原始的霍尔信号通过式(1)计算其角度位置信号。

由于“ATAN”运算用于比值“VY/VX”,而由间隙、温度以及老化等因素变化引起的磁场强度变化都将以同等程度作用于2个信号上,因此得到的角度信号本身就具有自适应补偿的特点。这一特性使得该芯片相比传统的线性霍尔芯片在温度变化时的精确度得到了较大的提升[4-5]。
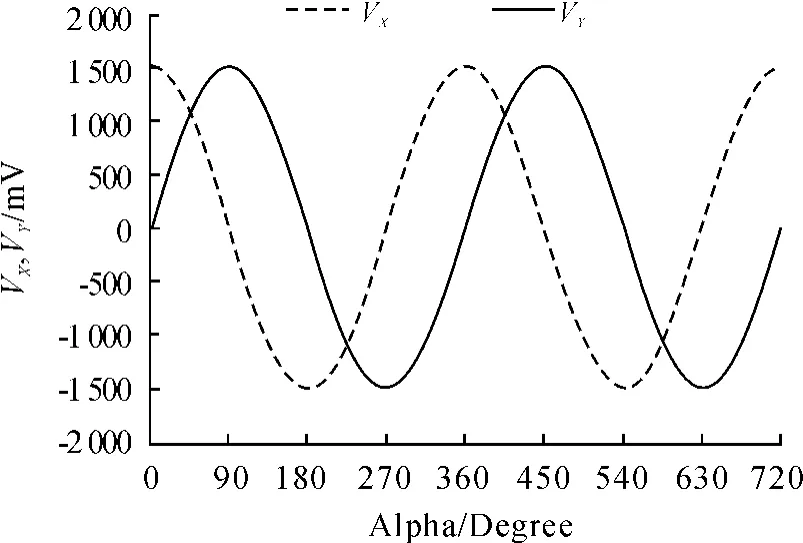
图2 输出信号:Vx∝cos(α),VY∝sin(α)
1.2 转角传感器系统结构
因为线控转向的特性是低速行驶时转向比率低,可以减少转弯或停车时转向盘转动的角度。因此,线控转向中方向盘一般转角为±540°,而MLX90316转角传感器的测量范围是 -180°~180°。为了将方向盘的转动角度和传感器的角度唯一对应起来,采用了1∶4的传动比[6]。
如图3所示:转角传感器的齿轮1与电机的转向柱固定连接;齿轮1与齿轮2相啮合,其传动比是1∶2;齿轮2与齿轮3通过转轴1固连在一起;齿轮3与齿轮4又相啮合,其传动比也是1∶2,这样就得到了1∶4的传动比。
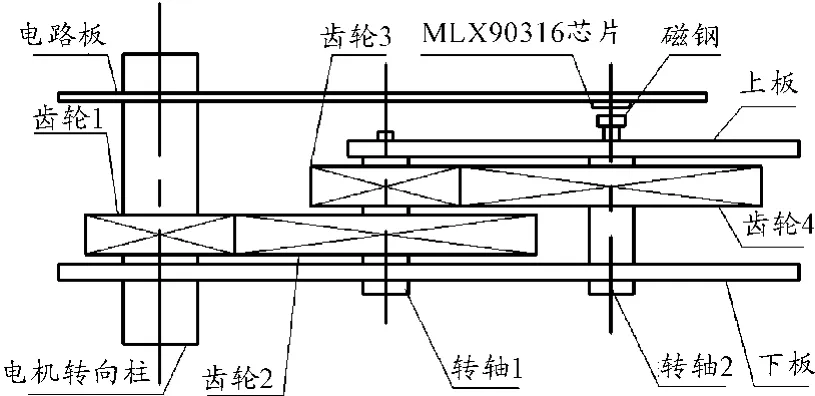
图3 角度传感器结构示意图
2 角度传感器电路硬件设计
电路中需要采用芯片MLX90316来感应磁钢转动时的磁场变化,并将该变化转化成方向盘转角。电路硬件部分要实现的功能是捕获磁场的转动量并将其转换为方向盘的转角。本文选用转角芯片MLX90316和单片机MC9S08DZ16来分别完成以上任务。MC9S08DZ16是飞思卡尔公司的8位单片机,自带功能丰富。在本系统中主要利用了单片机的SPI模块和MLX90316进行数据传输。在传感器和单片机之间传输数字型数据意味着可以降低易感性干扰。MC9S08DZ16还可以通过CAN总线模块和其他模块进行通信[7]。CAN总线的部分接口电路如图4所示。
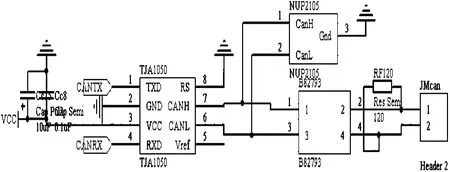
图4 CAN总线的部分接口电路
单片机以主机身份通过 SPI接口接受MLX90316传来的数据,并转变成相对应的方向盘角度值,通过CAN总线与发动机的ECU进行通信,将数据发送给ECU。
3 角度传感器软件设计
3.1 系统软件流程
系统软件流程主要包括处理器初始化模块、预置的FLASH数据读取模块、MLX90316的数据转换模块、CAN总线数据传输模块以及传感器中断置零模块[8],如图5所示。
3.2 方向盘绝对位置转角计算程序
当传感器安装到驱动电机转向柱上时,磁钢与方向盘的位置角度值一一对应,则方向盘的回正位置对应一个磁钢的位置角度值,将此角度设为绝对零度α0。传感器安装后,先将方向盘转到回正位置,此时通过外部按键产生置零中断,从中断处读取数值并存入FLASH中。之后每次上电均读取该值作为方向盘绝对位置角度计算的参考零点,这样即可计算出方向盘的绝对位置转角。

图5 系统软件流程
磁钢相对于参考零点的转角为:Absolute_Angle=α-α0;方向盘的绝对转角:Steer_Angle=(α-α0)×4;传感器通过读取下一次的角度Absolute _Angle减去前一次读取的Pre_Absolute_Angle的差的正负就可以判断方向盘的转动方向,并且还可通过积分或者微分的原理计算出转动的角加速度和角速度[9]。方向盘绝对转角计算的程序如下:

4 实验结果
固定好角度传感器,采用步进电机带动磁钢进行转动,每隔15°进行方向盘实际角度的测量。实际角度值和误差的关系如图6所示。
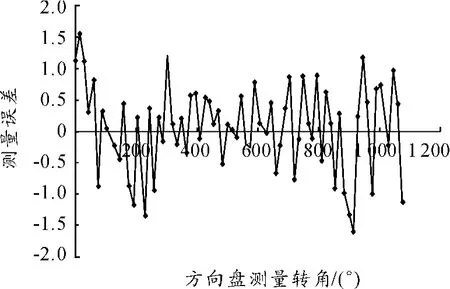
图6 方向盘转角测量误差
5 结论
由实验分析结果可知:该非接触式方向盘转角传感器基于三轴霍尔原理设计,可以满足线控对转向方向盘角度的读取需要,具有测量精度合理、测量范围广、可靠性高、成本低等优点,为线控转向控制协调打下了基础。
[1] 何仁,李强.汽车线控转向技术的现状与发展趋势[J].交通运输工程学报,2005,5(2):68-72.
[2] 于蕾艳,林逸,施国标.汽车线控转向系统的结构分析[J].农业装备与车辆工程,2008(4):20-38.
[3] 石沛林,唐绍丰,邱绪云,等.线控转向车辆转向控制策略研究[J].机械设计与制造,2011,(11):104-106.
[4] Melexis Microelectronic Integrated System.MLX90316 Rotary Position Sensor IC[Z].2009.
[5] 朱何,李胜,阮健.基于Mlx90316的电-机械转换器角位移测控系统[J].机电工程,2012,29(9):1046-1060.
[6] 张英福.巨磁电阻在方向盘转角传感器中的应用[J].重庆工学院学报:自然科学版,2009,23(10):17-20.
[7] 孟黎明,杨胜兵.基于CAN总线和巨磁阻的汽车踏板角度传感器研究[J].湖北汽车工业学院学报,2012,26(1):6-9.
[8] 李浩,徐衍亮.电动汽车方向盘绝对角位置传感器的研究[J].传感器与微系统,2011,30(3):32-34.
[9] 王俊,杨胜兵,过学迅.汽车方向盘转角传感器系统设计及算法研究[J].湖北汽车工业学院学报,2011,25 (1):19-21.
(责任编辑 刘 舸)
Steering Wheel Angle Sensor in Vehicle Steer-by-Wire(SBW)System
LIU Jun,QIN Shu-jian,ZHOU Hai-sen,JIA Lin-xi
(School of Automotive and Traffic Engineering,Jiangsu University,Zhenjiang 212013,China)
Using the magnetic sensor chip MLX90316 and the MC9S08DZ16 based on the Triaxis Hall Technology,a non-contact and intelligent steering angle sensor is built,which has advantages of cheap costs,great precision and anti-jamming performance.This steering angle sensor can provide an accurate angle value of steering wheel absolute position for SBW(steer-by-wire).By software,the direction,speed and acceleration of turning the steering wheel can be computed.
SBW;angle sensor;steering wheel angle;Hall sensor;MLX90316;non-contact
U463.4
A
1674-8425(2014)07-0001-04
10.3969/j.issn.1674-8425(z).2014.07.001
2014-01-08
刘军(1968—),男,江苏靖江人,博士,教授,主要从事汽车电子方面的研究。
刘军,秦书剑,周海森,等.汽车线控转向系统中转角传感器的研究[J].重庆理工大学学报:自然科学版,2014(7):1-4.
format:LIU Jun,QIN Shu-jian,ZHOU Hai-sen,et al.Steering Wheel Angle Sensor in Vehicle Steer-by-Wire (SBW)System[J].Journal of Chongqing University of Technology:Natural Science,2014(7):1-4.