利用时间窗权重进行航迹关联*
2014-06-15石教华
石教华
(中国电子科学研究院,北京 100041)
利用时间窗权重进行航迹关联*
石教华
(中国电子科学研究院,北京 100041)
提出一种利用传感器测量数据的时间窗权重进行航迹关联的方法,将目标运动状态的多维向量(如距离、方位角、俯仰角等)分解为多个一维状态标量;根据每个状态标量与时间的关系,提取两条航迹的共同测量时间区间,将其划分为若干个时间窗,计算对应时间窗内的权重;根据时间窗权重差计算每一个状态标量的航迹相似度;应用DS理论或Bayes理论进行航迹关联决策。
时间窗权重,航迹关联,DS理论
引言
在多传感器多目标跟踪系统中,为了获得目标更全面更精确的信息,剔除虚假信息,需要使用多个传感器同时对目标进行探测跟踪。雷达具有全天候测量距离和角度等优点,但测角精度较低;红外传感器则有测角精度高的优点,但不能测距离;ESM(Electronic Support Measures,电子支援措施)能够测量目标的方位角,同时能识别目标的类型和敌我属性,具有灵敏度高、隐蔽性强等优点。如果能将不同传感器的测量信息进行有效融合,就可以获取目标更加全面的信息,提高目标的跟踪精度。
对不同传感器的测量信息进行融合的前提是要知道哪些传感器的测量是来源于同一个真实目标[1],这就需要对不同传感器的测量信息进行关联处理,形成航迹关联对。传统的航迹关联算法有最近邻算法[2]、统计双门限算法[3]、序贯航迹关联算法[4]等。
多传感器对目标进行跟踪探测时,由于传感器的开机时间是不一样的,脉冲重复周期和扫描周期各不相同,数据采集率也具有明显差异,因此,来自不同传感器的观测数据通常不是在同一个时刻得到的,存在着观测数据的时间差。这样,在融合之前必须将这些观测数据进行同步处理,或者称作时间对准[5-6]。通常,利用一个传感器的时间作为公共处理时间,把来自其他传感器观测数据的时间通过插值或拟合处理,都统一到该传感器的观测时间上,产生在时间上和该传感器测量对准的伪测量数据,再进行数据关联处理。
传统的航迹关联方法首先需要对测量数据进行时间对准处理,不管是采用拉格朗日插值处理[7],还是采用最小二乘拟合处理[8],产生的都是伪测量数据,不可避免地存在误差,降低了数据的可信度。
本文提出一种利用传感器测量数据的时间窗权重进行航迹关联的方法,将目标运动状态的多维向量(如距离、方位角、俯仰角等)分解为多个一维状态标量;根据每个状态标量与时间的关系,提取两条航迹的共同测量时间区间,将其划分为若干个时间窗,计算对应时间窗内的权重;根据时间窗权重差计算每一个状态标量的航迹相似度;应用DS理论或Bayes理论进行航迹关联决策。时间窗权重航迹关联算法不需要对测量数据进行时间对准,保证了数据的可信度,减小了测量噪声的影响;同时能够获得航迹间的相似度指标,为人工航迹关联和辅助决策提供依据。
1 时间窗权重的定义
由于目标的运动状态是与时间有关的函数,对于目标跟踪系统来说,时间是目标航迹关联过程中极其重要的一个参数。目标的距离、高度、速度、加速度、方位角、俯仰角等都与时间有关。假设标量x是运动目标的一维状态标量,可以代表目标的距离、高度、角度、速度等任意一维标量。
令x=f(t),x是目标的一维状态标量,t是时间。
将标量x在t1时刻和t2时刻的时间区间内的平均值称为标量x在时间窗(t1~t2)内的权重W。
连续探测跟踪系统和离散探测跟踪系统的时间窗权重分别如图1和图2所示。
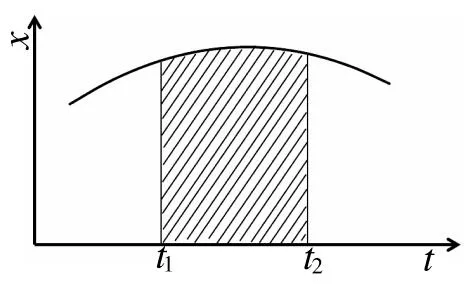
图1 连续探测跟踪系统的时间窗权重
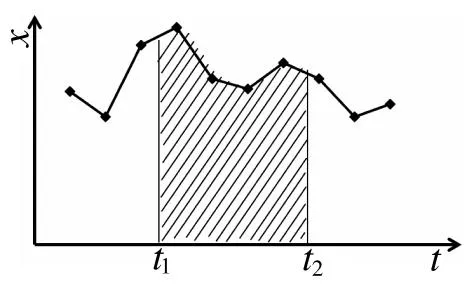
图2 离散探测跟踪系统的时间窗权重
2 时间窗权重航迹关联算法
假设X是目标的m维运动状态向量,令

X是与时间有关的函数,xk是X的成员参数,k=1,2,…,m,xk也是与时间有关的函数,记为:

传感器1和传感器2分别对目标进行跟踪探测,产生了两组测量数据序列,记为{X(ti),i=1,2,…,n1}和{X(tj),j=1,2,…,n2}。t代表时间,n1和n2分别为传感器1和传感器2的测量次数。
下面讨论传感器1和传感器2产生的两组测量数据序列{X(ti),i=1,2,…,n1}和{X(tj),j=1,2,…,n2}的相关度。关联步骤如下:
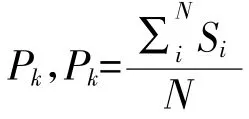
步骤一:将m维状态向量X分解为m个一维标量xk,k=1,2,…,m。计算一维测量序列{xk(ti),i= 1,2,…,n1}和{xk(tj),j=1,2,…,n2}的相关度Pk。
利用时间窗权重来分析测量序列{xk(ti),i=1,2,…,n1}和{xk(tj),j=1,2,…,n2}的相关性。假设传感器1的测量标量xk与时间的关系函数为xk=f(t),传感器2的测量标量xk与时间的关系函数为xk=g(t)。这两组测量数据列的xk与时间关系曲线如图3所示。
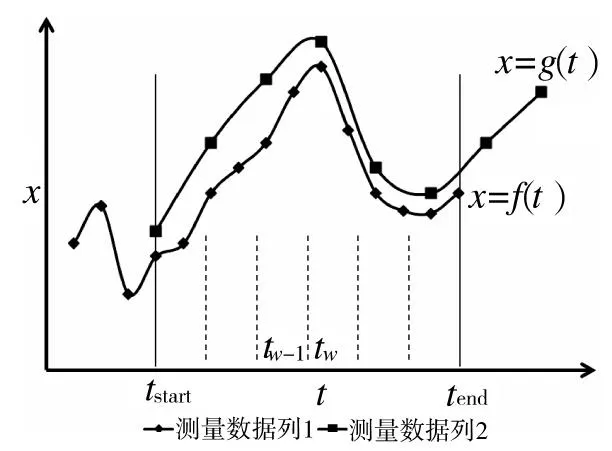
图3 测量数据列的xk与时间关系曲线
1)提取两组测量数据列中共同的测量时间区间,确定tstart和tend,共同时间区间为trange=tstart-tend;

3)分别求传感器1和传感器2的测量标量xk在每一个时间窗内的权重W1i和W2i;
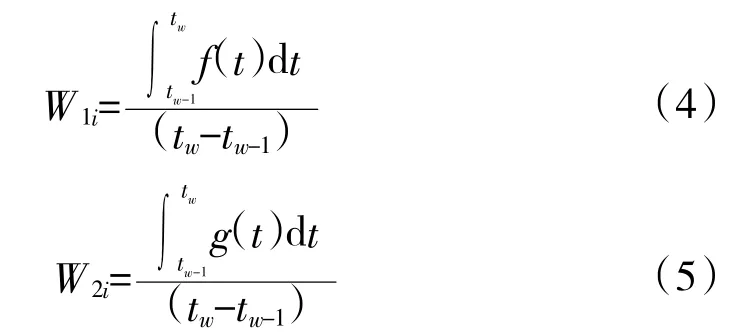
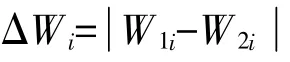
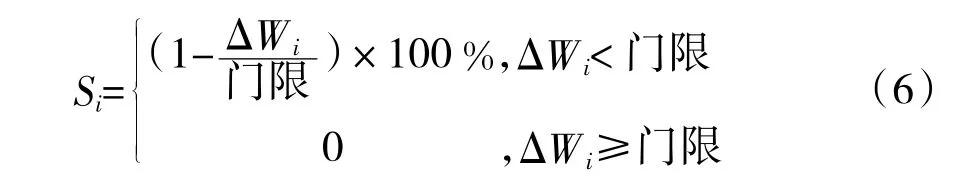
5)设置一个门限,计算每一个时间窗内的权重相关度Si,
步骤二:同理,按照步骤一求出m维状态向量X的其他成员标量xk的相关度Pk。
步骤三:将每个一维状态标量xk的测量序列作为两条航迹是否相关的一个证据。识别框架Θ={相关,不相关},相关的概率为Pk,不相关的概率为1-Pk。利用DS理论判断航迹是否相关。
1)每个一维状态标量xk的基本概率赋值为mk;

2)m维运行状态向量X的概率赋值合成D-S规则为:

根据m(相关)和m(不相关)的概率大小判断航迹是否相关。
结合目标的其他属性,如目标类型、目标的敌我属性等,利用DS理论进一步判断航迹的相关性。
步骤三中,得到m维状态向量X的每一维状态标量xk的相关度Pk后,也可以采用Bayes理论来判别航迹是否相关。
3 仿真分析
在一定区域内随机产生批量目标,目标批数为N,如图4。
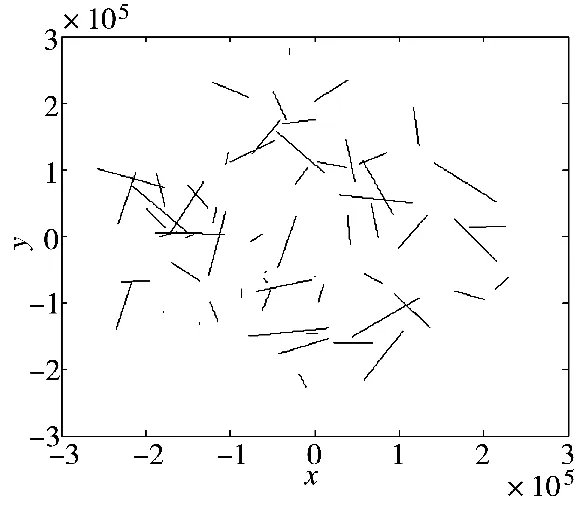
图4 随机目标的航迹(N=60)
雷达1和雷达2同地配置,均部署在坐标原点(0,0)。雷达1和雷达2具有不同的探测精度,距离精度分别为D1、D2,方位精度分别为A1、A2。雷达1和雷达2异步对目标进行探测,测量目标的距离和方位角,得到目标的距离时间数据列和方位角时间数据列。利用时间窗权重算法进行航迹关联处理,分别计算航迹在距离维度上的相似度Pd和方位角维度上的相似度Pa,应用DS理论进行关联判断,统计关联正确率。
雷达1和雷达2的距离精度分别为D1=100 m,D2=300m,方位精度分别为A1=0.02rad,A2=0.06rad。距离门限threshhold_d=(D1+D2)×5;方位角门限threshhold_a=(A1+A2)×5。
根据时间窗权重算法得到航迹的距离维度的相似度Pd和方位角维度的相似度Pa以后,采用DS理论来判别航迹是否相关。
用Matlab进行了500次仿真,仿真结果如图5。
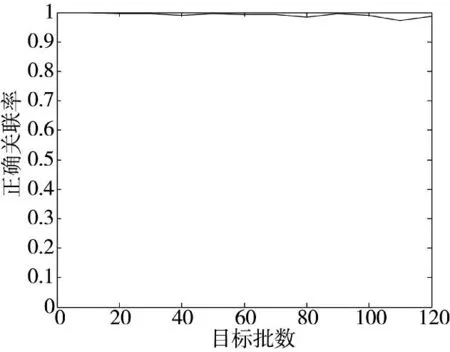
图5 仿真结果
4 结 语
本文提出一种利用传感器测量数据的时间窗权重进行航迹关联的方法,通过Matlab仿真验证,该算法的关联成功率较高,在目标密集环境下的关联效果也比较好。时间窗权重航迹关联算法能够得到目标的每一个状态标量下的航迹相似度,实际应用中可以将目标的每一个状态标量视同为目标的一项属性,作为相关的一个证据,配合目标类型(飞机、车辆、导弹等)、敌我属性等其他属性,进一步判断航迹间的相关性。本算法将多维状态向量分解为多个一维状态标量,将多维关联问题简化一维关联问题,便于模块化设计。
[1]David L H,James L.Handbook of Multisensor Data Fusion[M].CRC press,2001.
[2]Hall D L.An Introduction to Multisensor Data Fusion[J]. Proceedings of the IEEE,1997,85(1):6-23.
[3]何 友,彭应宁.分布式多传感器数据融合系统中的双门限航迹相关算法[J].电子科学学刊,1997(6):721-728.
[4]何 友,王国宏.多传感器信息融合及应用[M].北京:电子工业出版社,2000.
[5]杨万海.多传感器数据融合及其应用[M].西安:西安电子科技大学出版社,2004.
[6]施立涛.多传感器信息融合中的时间配准技术研究[D].长沙:国防科学技术大学,2010.
[7]潘 泉.多源信息融合理论及应用[M].北京:清华大学出版社,2013.
[8]梁 凯,潘 泉,宋国明,等.基于曲线拟合的多传感器时间对准方法研究[J].火力与指挥控制,2006,31(12): 51-53.
Using the Weight in Time Window to Associate Tracks
SHI Jiao-hua
(China Academy of Electronics and Information Technology,Beijing 100041,China)
A new method using the weight in time window to associate tracks is developed.Object's kinematic state may have many different kinds of state variables,such as range,azimuth and elevation. Each state variable is time-related mechanical characteristics.The common time range of two tracks is divided into several time windows.The weight in each time window is computed.The similarity of these two tracks based on each state variable is generated according to the weight difference in time window. Correct association can be made using DS theory or Bayes theory.
weight in time window,track correlation,DS
TN957
A
1002-0640(2014)10-0078-03
2013-09-05
2013-10-25
军队预研基金资助项目(102060302)
石教华(1976- ),男,湖北阳新人,高级工程师。研究方向:多传感器数据融合。
