一种基于多源信息融合的轴承监测系统研制
2014-05-23吴云锋
吴云锋,刘 波
(91872部队,山东 青岛 266012)
准确检测和诊断设备故障是设备维修效率和维修质量的基本保证。轴承是船舶上各类旋转机械中最常用的通用零部件之一,也是船舶动力系统中最容易产生故障的部件,据统计旋转机械的故障有30%是由轴承故障引起的。及早地发现轴承故障,并进行更换,可以有效防止故障进一步恶化。最原始的方法是将听音棒 (或螺丝刀)接触轴承座部位,靠听觉来判定有无故障,固然练习有素的人能觉察到轴承刚发生的疲劳剥落与损伤部位,但受主观因素的影响较大。随着计算机技术的发展,旋转机械在线监测与故障诊断系统在近几十年来得到了日益广泛的应用,世界各国竞相开展研究工作,不断推出新产品,已经有许多成功的在线监测与诊断系统。这些研究成果主要是通过外置传感器检测轴承的某一类状态信息,并采用智能信息处理手段提取信号特征,建立该类信息与轴承典型故障间的映射模型,忽略了复杂系统故障间的耦合特性,本文所介绍的轴承故障监测系统,通过多个传感器及信息采集装置,将运行过程中轴承的温度、转速、电流、振动加速度、振动频率,直观地反映在PC机上,以便操作人员可以随时分析判断,通过实验证明该监测系统有较高的准确性。
1 系统设计
基于多源信息融合的轴承故障监测系统是以构建信息融合的轴承故障监测和预报系统为总体目标,实现基于标准CAN总线的数据采集系统,揭示轴承故障与温度、振动、转速、电机电流、工况之间的映射模型,编制数据采集和轴承故障监测、预报软件,实现关键故障的在线监测。
1.1 总体设计
系统包括软件和硬件2大部分,硬件系统的结构如图1所示,系统主要有各种传感器 (电流传感器、温度传感器、振动传感器、转速传感器)、CAN总线数据采集电路板、CAN-232转换器及台式计算机组成。软件包括运行在CAN总线数据采集电路板的数据采集程序和运行在台式计算机上的上位机软件。上位计算机与CAN总线之间通过CAN-232转换器连接。CAN-232转换器可以将CAN总线的数据转换为串行通信数据。
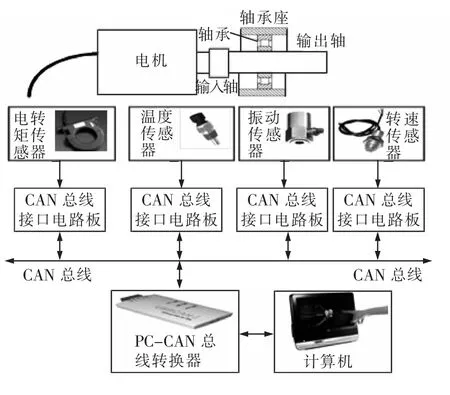
图1 系统的硬件结构图
1.2 上位机软件设计
上位机软件是指运行在PC端的软件。上位机软件通过RS232串口与CAN-232双向转换器连接,主要功能是按照串行通信协议,对接收到的数据进行解析,获得各传感器的测量值,并把这些测量值显示在图形用户界面上,保存在数据库中,以备后续查询和利用。用户及数据库管理模块功能是提供对数据和用户的管理等操作;故障监测模块是整个上位机软件的核心部分,其功能是根据轴承当前的信号、信号特征及数据库中的案例库的案例,判断当前轴承是否存在故障。
如图2所示,上位机软件包括串口通信模块、数据解析接口模块、数据采集模块、显示记录模块、用户及数据库管理模块和故障监测模块,各模块功能如下。
串口通信模块。串口通信模块将从计算机串行口接收缓冲区中接收数据采集板发送的数据,并将数据采集板发送的数据保存在接收字符串中。
数据解析接口模块:数据解析接口模块将利用CRC16规则检验接收字符串是否正确,并按照与数据采集板约定的格式解析数据。
数据采集模块。将解析后的数据分别保存在各变量中,得到测量数据。
显示记录模块。将计算机采集的数据保存在数据中,并且以实时更新曲线的形式显示在虚拟示波器中,以数字的形式显示在虚拟的七段数码管中。
故障监测模块。对采集到的各种数据进行时域、频域的处理,得到故障对应的特征,并基于故障案例库预测或者监测轴承的故障。
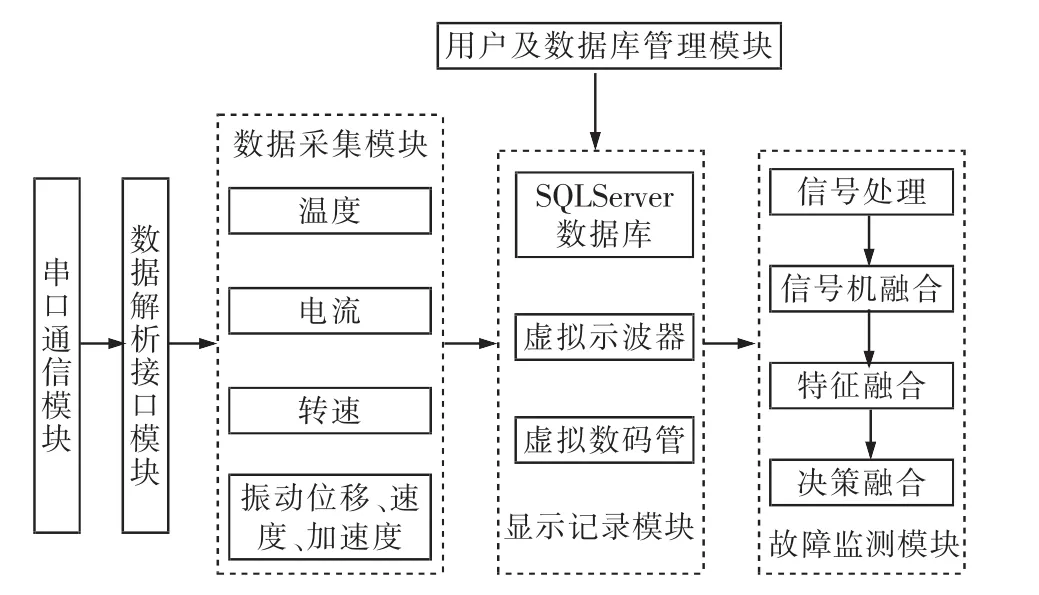
图2 上位机软件框架图
图3为轴承监测系统上位机软件主程序流程图,程序启动后首先加载MFC框架,然后加载当前测试轴承参数,连接数据库及串口,在此基础上,程序进入数据采集及故障监测执行循环。在该循环中各种传感器数据被实时采集、保存和处理。系统根据当前各传感器的特征,进行数据级、特征级和决策级的融合,以实现故障的监测,其中在决策级融合中提出了基于案例相似性的故障监测方法。
1.3 下位机设计
下位机设计包括硬件和软件2部分。其中的硬件设计方面选择最新型的STM32F373VC型ARM处理器作为接口电路的处理器。STM32F373VC型ARM处理器内部带有16位多路A/D转换器和1-32倍的信号放大器,最高工作频率为72MHz,具有较强的数据采集处理能力。根据轴承监测的结构特点,选择合适的电流传感器、转速传感器,确定各传感器的安装位置。将采集的信号分为2类:一类是模拟信号,本项目选择4~20 ma电流输出型传感器,如电流传感器、温度传感器,传感器输出的电流信号通过电流-电压变化电路变换为3.3 V以内的电压信号,传输给STM32F373VC型ARM处理器的A/D转换器;另一类是脉冲信号,如霍尔式转速传感器,将该类脉冲信号接入STM32F373VC内部的基数器引脚,从而计算转速。
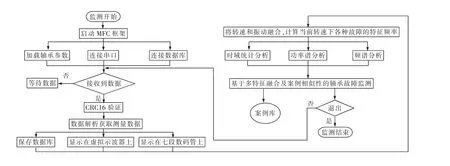
图3 轴承监测系统上位机软件的主程序流程图
设计CAN转换接口电路,选择PCA82C250芯片作为CAN总线收发器 (STM32F373VC内部集成有CAN总线控制器),按照CAN总线协议在KEIL集成开发环境中编写程序,将采集到的数据按照标准的Modbus协议发送到CAN总线式上,从而实现单点数据采集功能。下位机软件运行在STM32F373型ARM处理器上,通过A/D转换器、I/O口和485接口采集温度、电流、转速、振动等信息,并按照Modbus协议通过CAN总线接口发送到上位机。如图4所示,该软件使用STM32F373处理器提供的开发接口进行编程,设计A/D转换接口程序、I/O口输入及中断计算程序、485驱动程序和CAN总线驱动程序。其中的CAN-232转接口选择商业标准化产品。
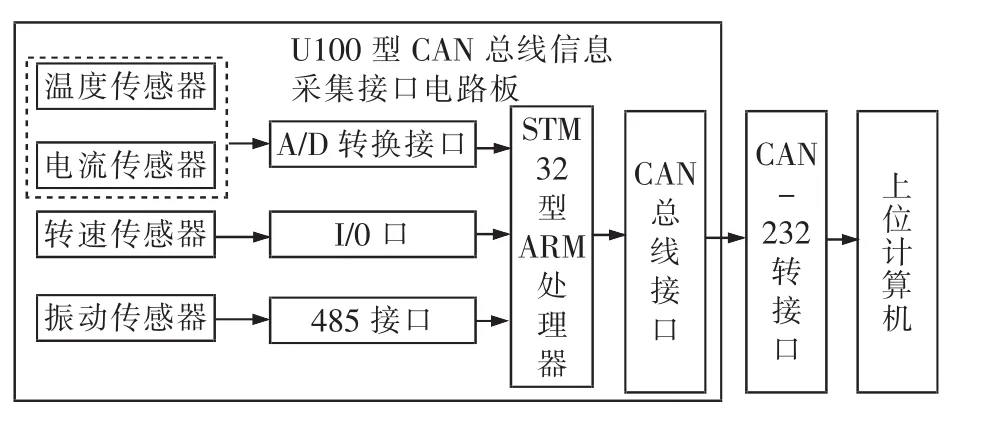
图4 下位机软件框架图
图5所示为下位机软件主程序流程图,上电以后,先是对ARM各外设进行初始化,硬件初始化完毕之后,开始CAN协议栈初始化,最后主程序进入一个无限循环。再循环中,首先等待CAN总线其它节点的消息,如果有新的消息,则校验接收到的数据是否符合Modbus CRC16算法,若符合,则进行命令解析,以确定上位机查询电压、电流、温度、转速中的哪一项数据,随后读取相应A/D转换器的数据,并按照Modbus格式生产和发送从机的反馈数据,从而完成一次主机查询、从机反馈的通信过程。主程序随后返回到等待其它节点的CAN消息。
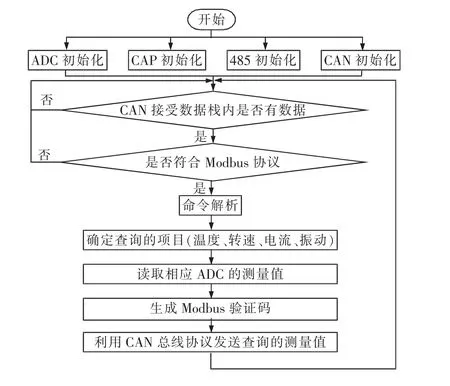
图5 下位机软件流程图
2 测试及总结
2013年11月到2014年6月期间,项目组用激光焊接机对轴承进行了不同部位的破坏,模拟轴承故障,在实验室内对该轴承故障监测系统进行了实验。通过实验验证了基于信息融合的故障类型识别的可行性,故障识别率超过了90%,满足设计指标。该成果能够有效解决船舶轴承故障在线监测、故障诊断和寿命预测等问题,为船舶的稳定运行和“精确维修”提供技术支持和保障,同时为其它船舶设备的故障监测和预报系统研究提供参考。