全自动椰子去壳绞丝设备的研制
2014-04-25刘艳明
刘艳明
(宿州职业技术学院机电工程系安徽·宿州234101)
全自动椰子去壳绞丝设备的研制
刘艳明
(宿州职业技术学院机电工程系安徽·宿州234101)
基于对椰子的几何、物理机械特性的研究,设计、试制了一种剖开绞丝式椰子去壳机,实现椰子的机械剥壳。椰肉的绞丝损耗率不大于3%。所研制的自动椰子去壳绞丝机,综合性能优、可靠性高、适应性强,操作简易,调节方便,提高生产效率的同时减少人员伤残事故的发生。
椰子 绞丝 伺服电机
椰子是一种重要的热带经济作物,全身都有利用开发价值。对成熟的椰子进行深加工,主要包括两方面的处理过程,一是机械加工部分,即剥衣、去壳、绞丝、榨汁等;二是生物工程技术处理部分,比如椰子水发酵后制作食用纤维。绞丝是椰子榨汁前必需的工序,本设计中的椰子自动去壳绞丝生产线,对降低椰子深加工产业的生产成本,提高椰子深加工产业生产效率,改善生产环境,提高椰子产品附加值,都具有重要意义。本生产线的另一大特色是将椰壳一切为二后保留下来,可用作工艺品初级材料,从而进一步提高椰子产品深加工附加值。
一、工作原理
先把椰子从中间切开,然后把两半椰子拉开一定距离,进入下道工序,此时有两把椰丝刀从切开的面进入,对椰肉进行刮切,把两个半块椰子刮切完毕后机器就完成工作。为提高该设备的生产效率,设备采用了六个生产工位循环工作,这六个生产工位装在输送链上,作腰圆形轨迹运动,这些工位上的零部件,在PLC和伺服电机的共同作用下,柔性机械手夹持着椰子完成直线运动,椰丝刀完成自身旋转和X、Y进给运动,该工位的工作内容完成后运行到下一工位。第一道工位主要是用柔性机械手夹持椰子,第二道工位对椰子进行剖分,第三道工位对椰肉进行刮削,第四道工位松放椰壳。在第二道和第三道工位处都有旋转刀具,分别对椰子进行剖分和刮削(见图Ⅰ)。
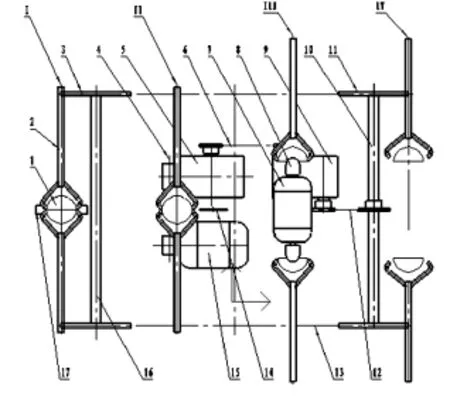
图Ⅰ 工作过程简图
二、上料机构
通过上料机构把大小不等的椰子1准确地送至柔性机械手的夹持范围。在上料前,调整支架4和滑轨8之间的相对位置,使上下夹持臂的中心和柔性机械手的中心等高,然后通过手摇或伺服电机(可选配),打开上下夹持臂2和3,通过人工或上料机械手(可选配)把椰子放到上下夹持臂的中间,然后摇动手柄5,带动凸轮6旋转,使上下夹持臂在拉簧5的作用下夹持住椰子,由于上下夹持臂是同时往椰子中心运动,因而无论椰子大小,椰子的中心与柔性机械手的中心始终等高,此时通过人工或电机推动滑轨8(可选配),把椰子送入左右柔性机械手的中间(见图Ⅱ)。
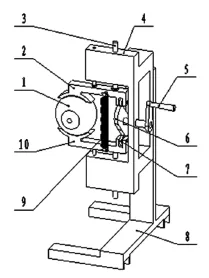
图Ⅱ
三、柔性机械手机构
在本设计中采用了柔性机械手,它的工作原理是,在圆周方向有三个夹持臂4,圆锥推座2在气缸1的带动下控制夹持臂的开合,在传感器的检测下,当有椰子进入机械手的夹持工位时,PLC传递指令给电磁阀,使气缸带动圆锥推座2朝前运动,夹持臂4在其作用下,开始朝中间合拢,夹紧椰子。如果气缸1做退回运动,夹持臂在复位弹簧5的拉力下,松开椰子。它的创新之处在于两个方面,第一,柔性机械手在圆周方向有三个爪组成,使用同一动力,而每个爪的动作可以独立运动,当其中的一个爪被椰子挡住时,另外两个爪可以继续动作,直到抓住不规则的椰子。第二,柔性机械手的前部由机械机构组成,后部的动力由气动系统提供,这样既可以保证动作的柔和,又可以保证大小椰子所需要的行程。(见图Ⅲ)

图Ⅲ
四、分切机构
当左右机械手夹持住椰子2后,在输送链的驱动下,运行到下一工位即分切工位,锯片刀5由电机带动自转,同时由伺服电机带动锯片刀5和电机上下移动,当切刀朝上移动时,把椰子2从中切开,从而完成分切动作(见图Ⅳ)。

图Ⅳ
五、绞丝机构
当分切完成后,椰子在输送带6的带动下,进入绞丝工位,同时柔性机械手5在槽型凸轮10的作用下,两半的椰子拉开一定的距离,椰丝刀3在电机1的带动下高速旋转(1440n/min),同时电机1在电机固定架2的带动下,沿X轴和Y轴进给,而电机固定架2的X、Y轴的运动,其动力来自于X轴伺服电机和Y轴伺服电机(图中未标出),此时柔性机械手5夹持着椰子4,以支座7为支撑,在伺服电机11(直线型)推动下,沿Z轴方向运动,即把椰子2送向旋转的椰丝刀,椰肉在椰丝刀的作用下,变成椰丝落入椰丝槽13,并由之导出,以上动作是两侧同时进行。柔性机械手5的中心轴与椰丝刀的中心是重合的,当椰子和椰丝刀接触时,椰丝刀首先切除的是椰子的中心部位,当椰丝刀进入椰肉的一定深度后,椰丝刀在X轴伺服电机和Y轴伺服电机带动下,开始做圆周运动,以后的圆周运动总比前一次的圆周运动的直径要大,直至椰子的外壳,当椰丝刀碰到椰子的外壳时,由于椰子的壳较硬,会发出较大的噪音,噪音传感器12会被触发,PLC接到信号并给X、Y轴伺服电机发出指令,停止做圆周运动,同时PLC也给伺服电机11发出指令,沿z轴方向继续运动,运动的距离即一个椰丝刀刃区的长度,然后椰丝刀继续做由小到大的圆周运动,如此做循环运动,直至伺服电机11沿Z轴朝前进给,听到较大噪音时,说明椰肉被切削干净,即完成了一个椰子的绞丝过程。究其原理,就如机械制造行业中的加工中心在加工一个球面一样,通过X、Y、Z伺服电机三轴联动,来完成半个球面的加工。(见图Ⅴ)

图Ⅴ
六、椰壳脱离
从绞丝工位运动至椰壳脱离工位,圆锥推座2在气缸3的带动下,朝后运动,夹持臂1在复位弹簧6的作用下,朝上运动,此时,椰子7从柔性机械手脱离,落入椰壳槽5,由此导出。(见图Ⅵ)

图Ⅵ
七、主要参数与性能指标
每小时对椰子处理量:220~240公斤;设备消耗功率:4.5KW;设备耗气量:45L/min;压缩空气压力:0.5~0.6MPa;整机外形尺寸(长X宽X高):3060X2200X1770(mm);整机照片见图Ⅶ

图Ⅶ
[1]肖红,易美华.椰子的开发利用[J].海南大学学报(自然科学版),2003,6(2):183-189.
[2]赵松林.椰子综合加工技术[M].北京:中国农业出版社,2007.
[3]肖仁鹏,马鑫,樊军庆.椰子自动剥衣机的设计【J】.食品与机械,2012,28(1):142-143.
[4]陈秀文,谢俊夫,陈和贤.椰子剥壳机构之研制[J].农业机械学刊,2006,9(3):23-32.
[5]尚江坤,张燕.椰子剥衣机研制的现状及展望【J】.安徽农业科学,2012,40(6):3803-3805.
[6]夏秋玲,李瑞,等.椰子的利用价值及综合加工技术[J].中国热带农业,2007(3):37-38.
TH 122
A
1009-8534(2014)04-0087-03
2014-04-16
刘艳明(1968—),男,安徽宿州人,宿州职业技术学院副研究员。研究方向:机电一体化。
