基于Harris算法的自适应双极性红外舰船目标检测
2014-03-29陈咸志罗镇宝金代中胡俊杰
徐 倩,陈咸志,罗镇宝,金代中,胡俊杰,曲 锐
(西南技术物理研究所,四川 成都610041)
1 引言
海空背景下红外舰船目标检测技术是对海侦查、监测等应用领域研究的重点,有效的红外舰船目标检测为后续的识别与跟踪提供了重要基础。受舰船目标辐射特性的影响,红外舰船目标成像表现出多极性,即目标灰度高于或低于背景灰度,或部分高于而另一部分低于背景灰度,另一方面受传感器噪声、海面辐射、天空热辐射以及作用距离远等因素的影响,舰船目标在图像中表现出对比度低、信噪比低,特别是在背景中存在有非平稳杂波干扰的情况时,目标可能被杂波淹没,使得红外舰船目标的有效检测成为一个极具挑战性的问题。
多年来许多学者进行了相关研究:文献[1]建立舰船轮廓模型定位目标感兴趣区域,但建立的模型与实际舰船很难达到一致,检测效果较差。文献[2]首先提取海天线确定目标感兴趣区域,再利用行列均值自适应阈值分割出舰船目标。该算法在不存在海天线的情况下会发生误检,且不适用于目标亮度低于背景的场景。文献[3]对图像建立区域连接图,采用最小生成树方法得到分类结果。该算法在目标灰度分布不均匀时不能有效检测出目标。
已有算法大多基于舰船目标灰度高于背景灰度能量(即已知目标能量强度高于背景的关系)或舰船目标成像灰度均匀的假设。实际应用中,舰船目标成像不仅可能呈现出目标灰度高于或低于背景,即双极性,还可能呈现出多极性,即目标区域内部部分区域灰度高于背景,而其他部分区域灰度低于背景。如图1所示为已有方法对灰度双极性或多极性舰船目标的检测结果,可见当目标灰度低于背景灰度(图1(a))和灰度呈现多极性(图1(b),图1(c))时,已有方法不能准确检测出舰船目标。
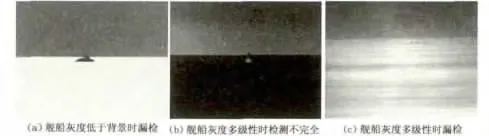
图1 传统算法对某些典型红外舰船图像检测结果
针对现有方法在舰船目标成像灰度呈现“双极性”或多极性的情况下适应能力不足,本文提出了一种新的红外舰船目标检测方法。首先对原始红外图像进行均值漂移滤波去掉一部分杂波干扰;再对滤波后图像进行行垂直方向梯度投影提取感兴趣区域;然后在感兴趣区域提取角点,得到舰船目标的大致区域,最后优化检测窗口得到完整目标。实验表明该方法能够在舰船目标呈现双极性或多级性的情况下获得较好的检测结果。
2 基于均值漂移的图像滤波
均值漂移算法(Mean Shift)在图像平滑和图像分割中都得到了很好的应用[4]。均值漂移模型可以实现图像的不连续保持性滤波,不仅可以滤除图像中的噪声信息,而且能够自适应地减小局部结构中显著边缘信息的平滑。基于前述优点,均值漂移滤波能够有效滤除海面杂波干扰的同时不损失舰船目标的边缘信息,有利于后续目标角点的提取。
均值漂移算法是采用迭代计算的方式,即先算出当前点的偏移均值,移动该点到其偏移均值,然后以此为新的起始点,继续移动,直到满足一定条件结束迭代计算。该算法自应用到图像处理中以来,针对不同应用,出现了多种偏移均值的表达形式[4-6],文中采用定义形式[5],偏移均值表示为:
其中,G(x)是一核函数;w(xi)≥0是一个赋给采样点xi的权重;h为一常数。给定初始点、核函数和容许误差均值漂移算法循环的执行下面两步,直至结束条件满足:
(1)计算mh(x);
文中将红外舰船目标的空间信息和灰度信息统一考虑,组成特征向量x=(xs,xr),xs表示坐标,xr表示该坐标上对应的灰度特征,并采用高斯核函数估计x的分布,其表达形式如下:

式中,g(x)为高斯核函数的剖面函数;hs、hr为控制着图像滤波平滑度的特定参数;C为一保证Ghs,hr的积分为1的正数;则Ghs,hr为估计灰度及空间信息分布的两高斯核函数的剖面函数复合而成的核函数。
分别用xi和zi,i=1,…,n表示原始和平滑后的图像,用yi,j来表示第i点使用核Ghs,hr在均值漂移过程中第j次迭代的位置,由式(1)、(2)可表示为:
由均值漂移算法原理,用均值漂移算法对每一个像素点xi=(xis,xir)进行如下步骤:
1)初始化j=1,并且使yi,1=xi;
2)运用均值漂移算法计算yi,j+1,直到收敛,记收敛后的值为yi,c;
考虑到处理时间和处理效果,通过大量试验得到经验值hs=4,hr=8,可以获得比较好的滤波效果,如图2所示,其中(a)为原始图像,(b)为运用均值滤波算法对图(a)滤波结果,可以看出均值滤波在保持舰船目标边缘及内部灰度特性时消除了大量海面杂波及天空云层干扰。
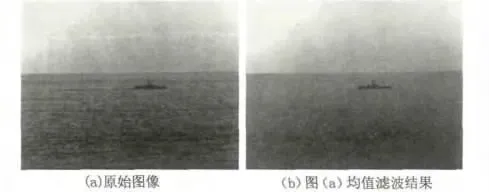
图2 均值滤波结果
3 基于梯度特征的感兴趣区域提取方法
本文针对天空云层较少海面无强鱼鳞光的场景,对成像面积具有一定大小(大于10×10像素,舰船高度不超过图像高度的1/4)的双极性或多级性舰船目标进行检测。
提取舰船目标感兴趣区域的传统做法是提取海天线[7],这在海天线模糊或不存在海天线情况下容易发生误检。当存在海天线时,舰船一般出现在海天线附近(如图1所示),由于天空和海面存在热辐射差,在海天线过渡区域图像垂直方向梯度变化大;当不存在海天线时,由于舰船大多呈扁平状、存在吃水线以及舰船附近水纹多出现水平分布,在舰船附近垂直方向梯度变化也较明显。因此无论是否存在海天线,舰船附近区域垂直方向梯度都会有较大变化。
由于天空背景灰度分布比较均匀而海面杂波干扰比较强,可以通过检测第一个垂直方向梯度变化较大的行再上下进行行扩展来初步定位舰船区域。图3是图1(c)行垂直方向梯度均值投影图。
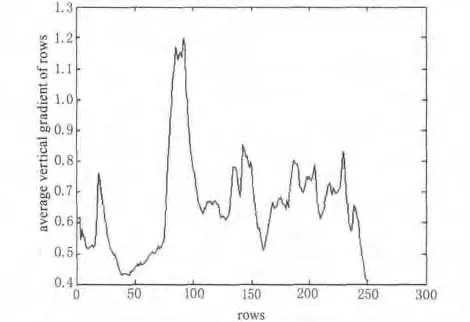
图3 图1(c)行垂直方向梯度均值投影
设图像尺寸为M×N,(i,j)是二维数字图像平面上的点,f(i,j)是经均值滤波后图像各点的灰度值,综合以上分析,可以得出感兴趣区域(ROI)提取方法,步骤如下:
1)将图像与垂直向梯度算子[-1;0;0;0;1]相卷,得到垂直向梯度Iy(i,j),并记录于长度为M×N的数组中;
2)垂直向梯度取绝对值,计算各行行梯度均值,为进一步消除杂波干扰,取相邻三行平均值作为各行行均值,得到行垂直方向梯度均值投影Avg_Iy(j),j=0,1,…,M-1,并记录于长度为M的数组中;
3)设定行垂直方向梯度均值阈值th1,通过大量实验得到经验值:
ROI获取流程图如图4所示,图5给出了存在海天线和不存在海天线两种场景下ROI提取结果。
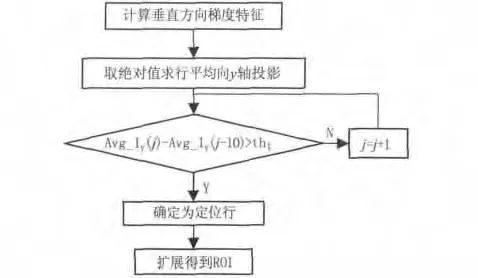
图4 ROI获取流程图
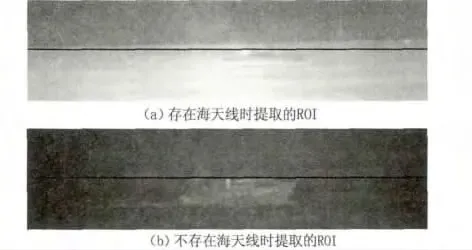
图5 典型场景下提取的舰船ROI(直线为定位行)
4 基于Harris算法的舰船目标检测
Harris算法是基于图像灰度的角点检测算法,若像素点所在位置的x方向梯度与y方向梯度的绝对值均比较大,则将该像素点判定为角点[8]。根据前面的分析,双极性舰船边缘及内部在各个方向梯度都有明显变化,因此可以通过检测ROI中红外舰船目标的Harris角点来实现舰船目标检测。
对于图像I(x,y),在点(x,y)处平移(Δx,Δy)后的自相似性可以通过自相关函数来表示,自相关函数可以近似为二次项函数:
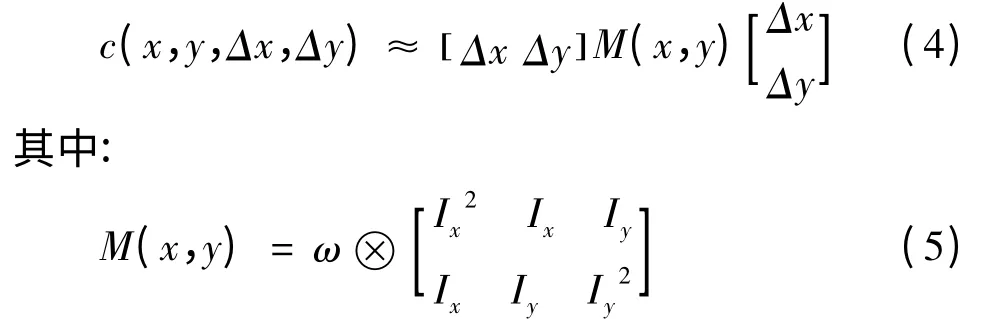
ω为高斯加权系数;Ix,Iy为原图在x和y两个方向的一阶梯度。
当二次项函数两个特征值都大且近似相等时此点为角点。由于求取特征值计算量较大,故定义响应函数:

式中,det M为矩阵M(x,y)的行列式;trace M为矩阵M(x,y)的迹,α取值一般为0.04~0.06,本文α取0.06。R值与特征值大小有关,当R值为局部最大值时,即为角点。
若直接寻找R值的局部最大值点,由于海面杂波的干扰会得到很多角点,几乎占据整个窗口,因此考虑先抑制一部分杂波角点响应值再寻找R值的局部最大值点。由于双极性舰船与背景灰度差异大,多级性舰船内部部分与部分之间存在灰度差异,因此在舰船边缘及内部区域会检测出大量具有大响应值的密集角点,可以通过去掉弱响应值以抑制部分杂波角点,通过大量实验得到,抑制阈值设置为R最大值的0.008可以消除大部分杂波角点。对抑制后的R值寻找局部最大值即得初步检测角点。
在初步检测角点中仍会存在少量响应值很大的杂波角点,由于舰船目标角点的密集性使得杂波角点表现出奇异性,因此对初步检测角点x坐标值做统计,计算其均值和方差,去掉距均值2倍方差的奇异角点,得到最终检测角点。图6给出了角点检测流程图。
根据最终检测角点在ROI区域中画出矩形框使得其刚好包围所有的角点。图7给出了图1(c)ROI中舰船目标检测过程图,“+”号为检测出的角点位置,矩形框为初步检测结果。
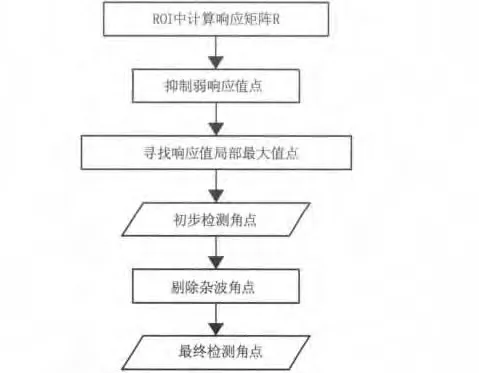
图6 角点检测流程图
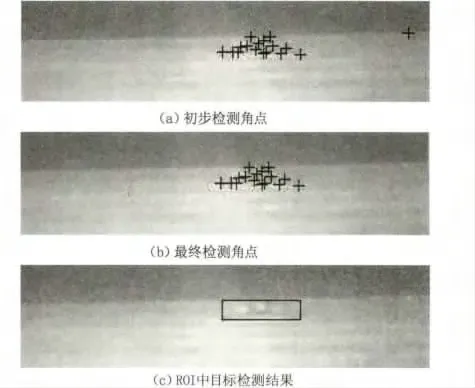
图7 ROI中舰船目标检测过程
5 目标检测窗口优化
在检测角点过程中虽然抑制了杂波,但同时可能损失一部分目标角点,使得检测窗口比真实目标略小;同时由于舰船烟囱成像一般为一条竖直线,有时检测不出角点,使得检测窗口高度比真实目标略低,因此需对检测窗口进一步优化。
由于舰船各个方向梯度都较大,可以将已有检测窗口沿各个方向逐步扩展,每扩展一次计算扩展后梯度均值与上次窗口梯度均值的比值,与给定阈值作比较,大于阈值则继续扩展,小于阈值则停止。经实验验证,水平方向阈值设置为0.95,垂直方向阈值设置为0.995可以获得较完整的目标窗口。
6 实验结果与分析
采用文中提出的舰船目标检测方法,对实际拍摄的双极性和多级性红外舰船图像进行了实验,图像大小为320×254,检测结果均用黑色矩形框标出如图8所示。其中(a)和(d)中舰船区域灰度高于背景,(b)和(e)中舰船区域灰度低于背景,而(c)和(f)中舰船区域灰度分布不均匀,从图中可以看出,本文算法均能大致检测出红外舰船目标。
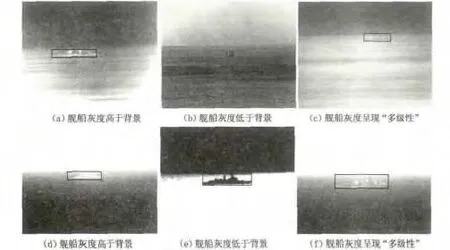
图8 某些典型场景下双极性和多级性舰船目标检测结果
为了验证算法的鲁棒性,对一视频序列进行了实验,限于篇幅的原因,仅从序列中选取第1帧、第173帧以及第450帧图像进行说明,如图9所示。在视频序列中,舰船在垂直和水平方向上均有移动,图9(c)中天空部分多了一个很大的亮斑干扰,实验结果表明,本文算法均能够比较准确的提取红外舰船目标,算法稳定性较好。
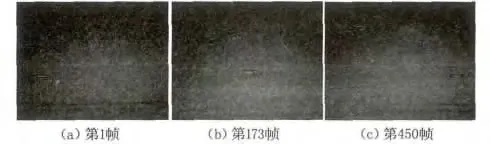
图9 视频序列中舰船目标检测结果
7 结语
针对不同环境和拍摄角度下红外图像中舰船目标呈现“双极性”和“多极性”的问题,本文提出了一种新的基于梯度信息和Harris角点检测的红外舰船目标检测算法。首先对图像进行均值漂移滤波以抑制杂波干扰,在此基础上,利用图像的梯度特征获得感兴趣区域(ROI),很好地解决了不存在海天线和海天线模糊时舰船目标检测的难题,随后通过自适应设置Harris算法阈值并去掉杂波角点,实现舰船目标的自动检测,为后续的目标识别和跟踪创造了有利条件。然而需要指出的是,文中算法并不适应任何情况,当海面有强鱼鳞光反射和天空有较多云层时,检测算法也有发生误检的风险,这些都是今后需要进一步完善和提高的地方。
[1] YAN Fabao,ZOU Changwen,WANG Lu,et al.Infrared warship target detection based on SUSAN algorithm and segmentation algorithm using the mean of image rows and colums[J].Laser&Infrared,2011,41(3):324-327.(in Chinese)严发宝,邹常文,王璐,等.基于SUSAN算法和行列均值分割的海面舰船检测[J].激光与红外,2011,41(3):324-327.
[2] YANG Mingyue,YANG Weiping.Automatic detection method of IR warship target in the complex sea-sky background[J].Infrared and Laser Engineering,2008,37(4):638-641.(in Chinese)杨明月,杨卫平.复杂海天背景下红外舰船目标的自动检测方法[J].红外与激光工程,2008,37(4):638-641.
[3] TAO Wenbing,JIN Hai.Ship infrared object segmentation based on mean shift filtering and graph spectral clustering[J].J.Infrared Millim.Waves,2007,26(1):61-64.(in Chinese)陶文兵,金海.基于均值漂移滤波及谱分类的海面舰船红外目标分割[J].红外与毫米波学报,2007,26(1):61-64.
[4] Comaniciu D,Meer P.Mean shift:A robust approach toward feature space analysis[J].IEEE Trans.PAMI.2002,24(5):603-619.
[5] Yizong Cheng.Mean shift,mode seeking,and clustering[J].IEEE Trans.PAMI,1995,17(8):790-799.
[6] Fashing M,Tomasi C.Mean shift is a bound optimization[J].IEEE Trans Pattern Anal Mach Intell,2005,27(3):471-474.
[7] GUO Xiaowei,MA Dengwu,DENG Li.Automatic target recognition algorithm for infrared warship under sea-sky background[J].Laser&Infrared,2012,42(12):1398-1402.(in Chinese)郭小威,马登武,邓力.海天背景下红外舰船自动目标识 别 算 法[J].激 光 与 红 外,2012,42(12):1398-1402.
[8] XU Kehu,WANG Tianzhao,CHEN Jinyu,et al.Harris corner detection algorithm based on self-adapting nonmaximal suppression[J].Science&Technology Review,2013,31(20):35-38.(in Chinese)徐克虎,王天召,陈金玉,等.自适应非最大抑制的Harris角点检测算法[J].科技导报,2013,31(20):35-38.
