柔性侧支撑在大型望远镜中的应用综述
2014-03-29韩琳楚张景旭
韩琳楚,张景旭,杨 飞
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春130033;2.中国科学院大学,北京100049)
1 引言
随着天文学各个领域的不断发展,对天文的观测已经不再局限于早期空间目标的成像识别,而需要对宇宙起源、黑洞形成及更遥远的星系进行进一步的探索,这就要求望远镜具备极高的观测能力。为了尽可能提高观测设备的分辨能力,获得更清晰更高精度的图像数据,望远镜口径也随之增大,从最初的几十厘米到目前最大口径的10 m凯克望远镜(Keck),以及国际上正在筹建的30 m加利福尼亚极大望远镜(CELT)、加拿大天文联盟领导的20 m极大光学望远镜(VLOT)、巨型拼接镜面望远镜(GSMT)以及30 m巨型地基式红外-可见光天文望远镜(TMT)[1-2],它们将领导天文学步入一个前所未有的新时代。而望远镜口径的增加使我们不得不面临的问题是镜面的支撑系统设计难度的增加。由于望远镜的自重和环境温度变化给镜面带来极大变形,原始的刚性支撑已经不能满足镜面面形精度要求,柔性支撑技术的引入势在必行。本文将从望远镜柔性支撑技术必要性出发,总结国内外望远镜支撑系统中的柔性径向支撑结构[3-8]。
2 柔性支撑的必要性
图1是口径为500 mm Sic反射镜,在20℃温升力热耦合作用下分别采用三点刚性支撑和柔性支撑的变形云图,两种支撑条件下的RMS值和PV值,如表1所示。可以看到,支撑结构变刚性为柔性后,镜面变形大大改善[9]。这也就是柔性支撑在望远镜支撑系统中变得越来越必要的原因。尤其在空间反射镜支撑中,由于反射镜在运载、发射过程中会受到强烈的振动、超重等恶劣环境变化[10-11],柔性支撑一方面可以用来隔振,一方面很大程度上解决主镜装配应力,更重要的是当温度变化时,柔性支撑可用自身变形补偿热特性不匹配带来的影响[12]。
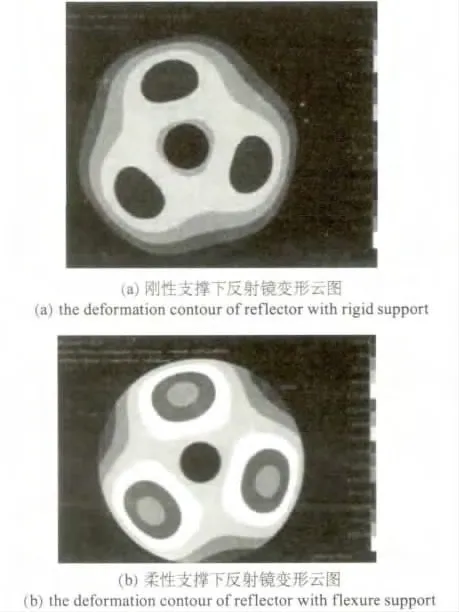
图1 两种支撑方式下的变形云图Fig.1 The deformation contour undering two kinds of suppot pattern
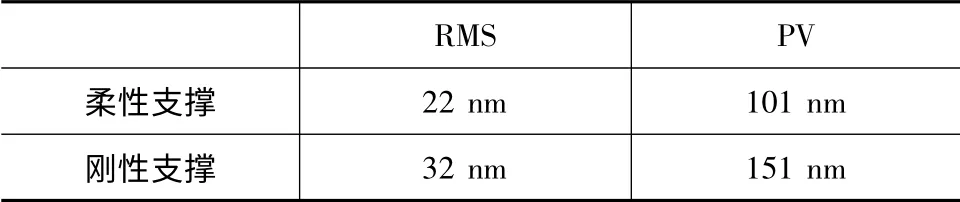
表1 两种支撑条件下镜面的RMS和PV值比较Tab.1 The compare with RMSand PV undering two kinds of support structure
3 柔性支撑设计原则
柔性支撑技术包括光学元件的定位夹紧、镜面做俯仰运动时支撑结构的安全保证、镜面面形精度的保障[13]。柔性支撑作为一种半运动学支撑方式,无需润滑免于摩擦,在镜面转动和倾斜时的磁滞现象较刚性支撑也更弱。在不同环境下(例如高温或低温、真空、原子核辐射、灰尘),柔性支撑能以最小程度影响光学设备的运行。为了使光学仪器发挥出最佳状态,镜面达到最高分辨率,一方面镜面的安装要使其处在中心位置;另一方面,在运行、储存、运送期间的复杂环境下依然使光学设备保持高精度的性能。因此,在柔性支撑设计时要遵循以下几个原则:①支撑必须以很小的附加作用力作用在光学元件上,以保证对光学表面的影响最小;②支撑系统要具备足够高的刚度来满足光学元件的校准及姿态保持的要求;③支撑结构必须是无热的,即随温度变化,光学元件表面轮廓或元件的相对位置变化不大;④材料的稳定性和蠕变性影响要加以考虑,保证光学元件随时间变化依然保持稳定;⑤支撑结构尺寸和重力越小越好;⑥支撑制造和材料花费尽可能少[14]。
4 柔性侧支撑结构形式
柔性支撑结构最初都是基于柔性铰链原理,应用最多的就是板簧型结构,进而演化出十字交叉铰链结构。常见的还有柔性杆结构,进而演化出在柔性杆上切槽或开圆弧铰链的形式[15]。在望远镜支撑系统中,根据支撑需求的不同,设计不同的结构形式选取适合的支撑材料来卸载镜面变形传递的力或温度变化引起的位移。以下主要介绍三种柔性支撑形式。
4.1 三点切向支撑
1964年,Chin描述了一种三点切向支撑原理,由三个沿切向方向均匀分布在镜面边缘的柔性结构组成,这种柔性结构可以是柔性杆也可以是悬臂梁。切向杆设计中,镜面边缘与切向杆中心凸起处粘结,如图2所示。悬臂梁设计中,镜面边缘与悬臂梁端部胶接,如图3所示。这两种柔性屈服力都过反射镜重力的中心[16]。
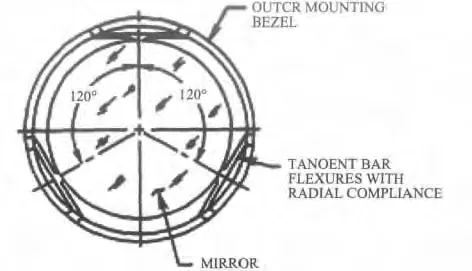
图2 切相杆柔性支撑Fig.2 Tangent bar flexure support
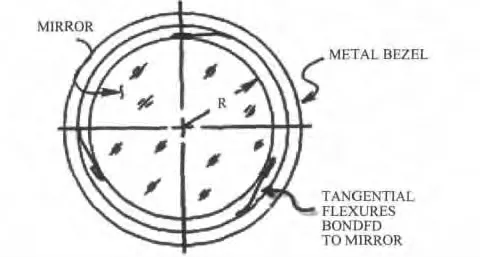
图3 悬臂梁柔性支撑Fig.3 Cantilever tangent bar flexure support
基于切向杆设计原理,1988年Vukobratovich和Richard使用三个切向接触的柔性支架安装在圆形反射镜的侧面,柔性支架的两端固定在镜座上,如图4所示。同样,支架中心凸起处与镜面边缘粘结。每一个柔性支架与镜面相接触的界面处提供切向柔性允许温度的变化引起的镜面膨胀。
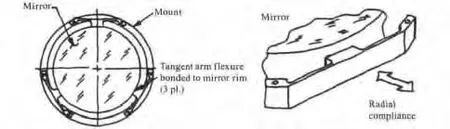
图4 切向柔性支架Fig.4 Mounting for tangential flexures
1990年,Ahmad和Huse提出了如图5所示的柔性支撑设计,透镜边缘与三个柔性叶片的端部衬垫胶接,三个叶片在径向方向是柔性的,在其他方向均是刚性的。当支撑结构发生变形或者面形随温度变化以及由支撑结构材料与镜面材料热膨胀系数不匹配时,柔性件会产生轻微变形来适应这些变化,由于这些作用关于机械轴对称,所以透镜保持共轴。此柔性结构可单独加工,与底座用螺丝旋紧,可在不破坏整体结构的情况下拆卸并更换[17-18]。
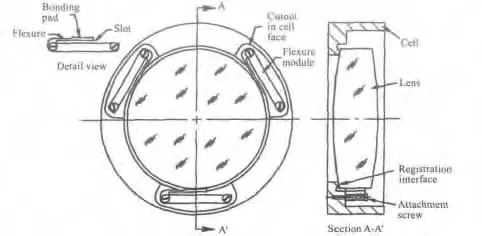
图5 柔性叶片支撑Fig.5 flexure blades support
1987年,Iranineiad在Keck望远镜镜片径向支撑设计中,也采用了类似的原理。如果望远镜的光轴水平放置,每块镜片将会受到一片薄而柔的不锈钢板支撑,钢板中部与主体结构伸出来的一个刚性圆柱固定在一起,在边缘处固定到1 cm厚的铟钢环上。铟钢环粘结在镜片中心处凹进去的圆形不通孔中。如图6所示,这个凹孔的柱形壁与环形间的界面,装有6个柔性叶片,用环氧树脂将铟钢粘结在壁上[19-20]。
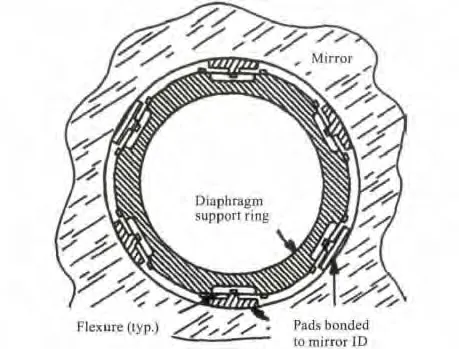
图6 Keck望远镜主反射镜镜片径向支撑设计概念Fig.6 Radial support design in the Keck primary segment
在哈勃空间望远镜的径向支撑设计中,反射镜背面由三个沿径向均匀放置的夹持装置支撑,如图7所示,每一个夹持装置带有一个切向鞍形支撑臂和一个U形夹,支撑臂与U形夹用螺栓固定连接[21]。U形夹相当于一个在径向方向上可变形的柔性结构,当镜面受温度影响而膨胀时U形夹通过自身变形可减小热应力的影响。
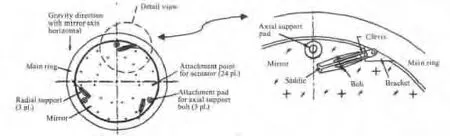
图7 哈勃空间望远镜U形夹柔性支撑Fig.7 Clevis flexure support of the Hubble Space Telescope
由这种柔性支撑原理衍生出来的设计还有很多,像是Bacich(1988年)提出的在镜座上用电火花加工切槽,形成三个均匀分布与镜座形成一个整体的柔性叶片[22];Bruning等人(1995年)提出在镜座上加工三条穿过透镜的细长曲线狭缝,其中狭缝两两交叉,就形成三个120°均匀分布的柔性环节将镜座分成内环和外环,进一步将内环和透镜与镜座之间的变形扰动隔离开来[23]。
4.2 边缘柔性支撑
不同于以上讨论的另一种支撑方式是1975年Hog设计的一种边缘柔性支撑,三个柔性叶片粘附在镜面边缘,与镜面光轴平行。如图8所示,再使用螺钉或粘结剂将它们固定在圆柱上。柔性叶片是平的,可以通过弯曲适应不同的线膨胀系数。为了获得足够的接触粘结面积,以及避免柔性叶片被弯曲成圆形,需要将反射镜和镜座上固定柔性叶片的区域加工成平面。Hog对这种安装结构进行了讨论,它可以用于支撑反射镜和平面反射镜。尽管温度会有变化,但是,这种设计还是趋于使光学件保持共轴[24]。
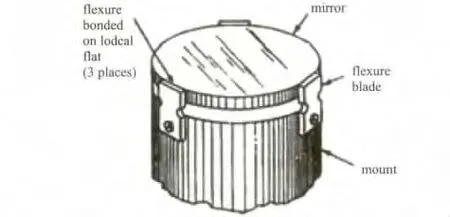
图8 边缘柔性支撑Fig.8 Mounting with edge flexures
与上述工作方式一样的还有一种支撑技术,被称为“蘑菇形反射镜”支撑技术,在2003年由Vukobratovich提出。这种反射镜背面有一个与反射镜同心的圆柱形突台,并与反射镜形成一体。在安装支撑结构时,便可加工出一系列柔性叶片,依次粘结在圆柱形凸台上。在提供径向屈服力的同时还可保持反射镜共轴[25]。
4.3 两脚架柔性支撑
带有柔性环节的两脚架应用于很多高精度镜面支撑中,多安装固定在镜面边缘或者背面,每个两脚架长度可调整,其中的柔性环节等效于双臂铰链或十字形柔性装置,具有旋转适应性,它的优点就是具有虚的枢轴装置,也就是说两条支撑腿延长线交点过镜面重心所在平面,通过调整每个两脚架两条腿的角度,可以把等效支点放置在镜面中性面,尽管两脚架并没有真正地固定在反射镜的那一点。通过调整两条支撑腿的直径改变两脚架支撑结构的刚度,因为不能同时满足刚度需求和热稳定性要求,通常在每根支柱或腿的两端设置双轴柔性的特征,避免力矩耦合到反射镜中。使用具有柔性结构的两脚架可以使与之相接触的镜面或镜座的尺寸随温度变化而变化[7]。图9表示的就是一种典型结构。
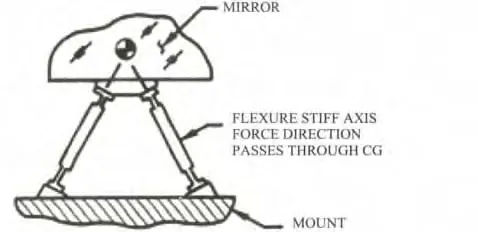
图9 两脚架典型结构Fig.9 typical structure of bipod
使用两脚架支撑的实例就是同温层观测站中红外天文望远镜(SOFIA)主镜的径向支撑。如图10所示,反射镜固定在三个两脚架的端部,两脚架放置在三个横向支撑臂的端部。每个两脚架都是一个能弯曲的不锈钢杆,为了能在4个位置提供万向接头弯曲,在每个两脚架中都设有柔性结构。利用螺钉将两脚架的端部固定在衬垫上,衬垫粘结在反射镜的侧面。在与反射镜侧面相切的方向上,每一根两脚架都是刚性的[26]。

图10 SOFIA主镜两脚架径向支撑示意图Fig.10 The SOFIA primary with bipods lateral support
5 总结
柔性支撑作为望远镜支撑系统的关键技术已经越来越受到研究人员的关注,包括很多支撑系统用到的气压、液压浮动支撑都是基于柔性思想而来的。柔性理论在精密机械上的应用也无处不在,对于超精密控制、定位等机械器件更是离不开柔性元件的使用[27]。从目前形式看,空间和机载望远镜由于环境复杂,支撑形式均采用柔性支撑;地基式望远镜口径趋于大型化,导致支撑系统十分复杂,在轴向上必须满足一定的刚度需求,柔性结构的加入大多做辅助成分。在径向支撑上,柔性结构多用来卸载热应力载荷,并使反射镜共轴。柔性支撑技术在望远镜中的普遍应用引导我们对它的多元化探索,大型望远镜中柔性支撑的成功案例也能为我们后期的研究工作提供借鉴意义。
[1] ZHANG Jingxu.Overview of structure technologies of large aperture ground-based telescopes[J].Chinese Optics,2012,5(4):327-336.(in Chinese)张景旭.地基大口径望远镜系统结构技术综述[J].中国光学,2012,5(4):327-336.
[2] WANG Fuguo,YANG Fei,ZHAO Hongchao,et al.Progress in TMT M3 system[J].Chinese Optics,2013,10(6):643-651.(in Chinese)王富国,杨飞,赵宏超,等.TMT望远镜三镜系统的研究进展[J].中国光学,2013,10(6):643-651.
[3] YANF Fei,AN Qichang,ZHANG Jingxu.Mirror surface figure evaluation based on power spectral density[J].Chinese Optics,2014,7(1):156-162.(in Chinese)杨飞,安其昌,张景旭.基于功率谱的反射镜面形评价[J].中国光学,2014,7(1):156-162.
[4] WILSON R N.Reflecting Telescope OpticalⅡ[M].New York:Spring-Verlag,2001.
[5] WANG Fuguo,ZHANG Jingxü,YANG Fei,et al.Crossed-plate type support structure of the second mirror[J].Acta Photonica Sinica,2009,38(3):674-676.(in Chinese)王富国,张景旭,杨飞,等.四翼梁式次镜支撑结构的研究[J].光子学报,2009,38(3):674-676.
[6] Doyle K B,Genberg V L,Michels G J.Integrated optomechanical analysis[M].New York:The Internation Society for Optical Engineers,2012.
[7] WANG Huai,DAI Shuang,ZHANG Jingxu.Azimuth shafting bearing structure in a large Alt-azimuth telescope[J].Optics and Precision Engineering,2012,20(7):1509-1516.(in Chinese)王槐,代霜,张景旭.大型地平式望远镜的方位轴系支撑结构[J].光学 精密工程,2012,20(7):1509-1516.
[8] IRVINE T.Bending Frequencies of Beams,Rods,and Pipes,Revision H[J].Vibrationdata publications,2002.
[9] LIU Yang,Yang Hongbo,LIU Shaobin.Lightweight primary reflector and design of supporting structure for space imaging system[J].Computer Simulation,2008,25(7):314-328.(in Chinese)刘洋,杨洪波,刘勺斌,等.空间主反射镜轻量化及柔性支撑设计与分析[J].计算机仿真,2008,25(7):314-328.
[10]REN Jianyue,CHEN CHangzheng,HE Bin,et al.Application of SiCand SiC/Al to TMA optical remote sensor[J].Optics and Precision Engineering,2008,16(12):2573-2543.(in Chinese)任建岳,陈长征,何斌,等.SiC和SiC/Al在TMA空间遥感器中的应用[J].光学 精密工程,2008,16(12):2537-2543.
[11]GUANG Yingjun,XIN Hongwei.Design of support for large aperture primary mirror[J].Opto-Electronic Engineering,2010,37(12):1-5.(in Chinese)关英俊,辛宏伟.大口径主反射镜支撑结构设计[J].光电工程,2010,37(12):1-5.
[12]LIU Hongwei,ZHANG Qin,DING Yalin,et al.Design of strip primary mirror supporting structure based on finite element analysis[J].Optics and Precision Engineering,2003,11(6):555-559.(in Chinese)刘宏伟,张芹,丁亚林,等.基于有限元分析的长条状主镜支撑结构设计[J].光学 精密工程,2003,11(6):555-559.
[13]XIN Hongwei,YANG Jinsong,GAO Minghui,et al.Support design for secondary mirror of high resolution space telescope[J].Infrared and Laser Engineering,2011,40(9):1724-1729.(in Chinese)辛宏伟,杨近松,高明辉,等.高分辨力空间遥感器次镜支撑设计[J].红外与激光工程,2011,40(9):1724-1729.
[14]Vukobratovich D,Richard RM.Flexure mounts for highresolution optical elements[J].SPIE,1988,959:18-36.
[15]CUI Yongpeng,HE Xin,ZHANG Kai.The support design of reflected mirror from the principle of the three points supported[J].Optical Instruments,2012,34(6):56-61.(in Chinese)崔永鹏,何欣,张凯.采用三点定位原理的反射镜支撑结构设计[J].光学仪器,2012,34(6):56-61.
[16]CHIN D.Optical mirror-mount design and philosophy[J].Applied Optics,1964,3(7):895-901.
[17]Your P R.Opto-mechanical system design[M].New York:Marcel Dekker,Inc.,1993.
[18]Ahmad A,Huse R L.Mounting for high resolution projection lenses:U.S.,4929054[P].1990-5-29.
[19]Iraninejad B,Lubliner J,Mast T,et al.Mirror deformation due to thermal expansion of inserts bonded to glass[J].SPIE,1996,2871:291.
[20]Pepi J W.Test and theoretical comparisons for bending and springing of the Keck segmented ten meter telescope[J].SPIE,1990,1271:275-287.
[21]Bely P Y.The design and construction of large optical telescope[M].New York:Springer-Verlag,2003.
[22]Bacich J J.Precision lenses mounting:U.S.,4733945[P].1988-3-29.
[23]Bruning JH,Dewitt F A,Hanford K E.Decoupled mount for optical element and stacked annuli assembly:U.S.,5428482[P].1995-6-27.
[24]Hog E.A kinematic mounting[J].Astron.&Astrophy.1975,41:107-109.
[25]Vukobratovich D.Introduction to optomechanical design[J].SPIE,2001,4451:126-130.
[26]Kaercher H J.The evolution of the SOFIA telescope system design-lessons learned during design and fabrication[J].SPIE,2003,4857:257-265.
[27]MA Li,XIE Wei,LIU Bo,et al.Design of micro-positioning stage with flexure hinge[J].Optics and Precision Engineering,2014,22(2):338-345.(in Chinese)马立,谢炜,刘波,等.柔性铰链微定位平台的设计[J].光学 精密工程,2014,22(2):338-345.
