奔跑马的机构设计与运动学仿真分析
2014-03-25郭鹏程张东生
孙 伟, 郭鹏程, 张东生, 张 璐, 闫 坤
(陕西理工学院 机械工程学院, 陕西 汉中 723000)
0 引 言
近年来,仿生学技术在国内外诸多领域得到广泛的应用和发展,国内有许多科研机构和高校相继成立了仿生学研究所或研究室。在工程实际中遇到的技术难题可借助仿生学在自然界生物系统中寻求到解决问题的方案,如北京航空航天大学结合仿生学等学科从蝠蟦获得灵感,通过模仿其胸鳍研究出了全柔性扑翼式机器人。文献[1]针对仿生学在机械设计领域中的实际运用,从外形仿生、结构仿生、功能仿生3个方面作了简要论述,对于后续仿生学研究,进一步促进仿生学的工程实际应用具有重要的意义。在国外,如日本、美国等非常重视仿生机器人的研究工作,并且已经走在了世界前列,非常规环境下工作的仿生机器人已成为机器人领域的重要发展方向[2]。奔跑马的出现为人们的健身娱乐活动注入了新鲜的血液,符合现在绿色运动的大潮流,同时也为其它仿生机构的研究提供了参考。本文中的奔跑马是以马为仿生对象,单靠连杆机构模拟实现其在陆地上行走与奔跑的健身运动机构,和东北大学研究的健身马[3]相比,具有结构简单、原理独特等特点,克服了采用一个电机控制一个自由度对控制的要求高等不足。
首先通过研究马奔跑过程的运动规律,运用仿生学原理、人机工程学以及结合连杆机构,确定奔跑马机构运动简图,然后根据机构运动简图对机构的结构方案及运动步骤进行分析,确定机构传动方案,最后采用Pro/E进行多次运动仿真分析及尺寸优化,确定奔跑马各杆件的尺寸规格,并进行了实体加工造型。
1 机构原理与结构方案
1.1 机构工作原理
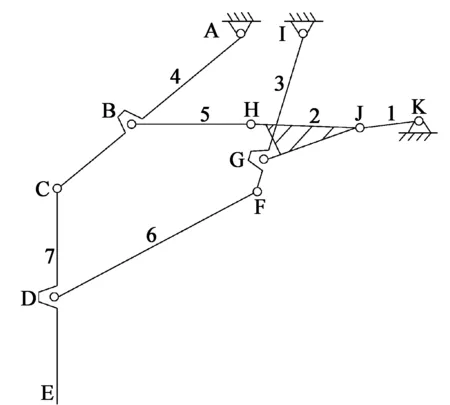
1.曲柄; 2.连板; 3.支撑杆; 4.大腿; 5.大腿拉杆; 6.小腿拉杆; 7.小腿图1 奔跑马运动简图
图1为奔跑马的运动简图。在机构中,活动构件数n=7,低副pl=10,高副ph=0,机构自由度为:
P=3n-2pl-ph=1,
机构自由度数目和机构原动件数相等,符合机构具有确定运动的条件[4]。
为了分析简化结构,根据机构的组成原理将奔跑马多连杆机构拆分为3个基本的Ⅱ级杆组[4],如图2所示。
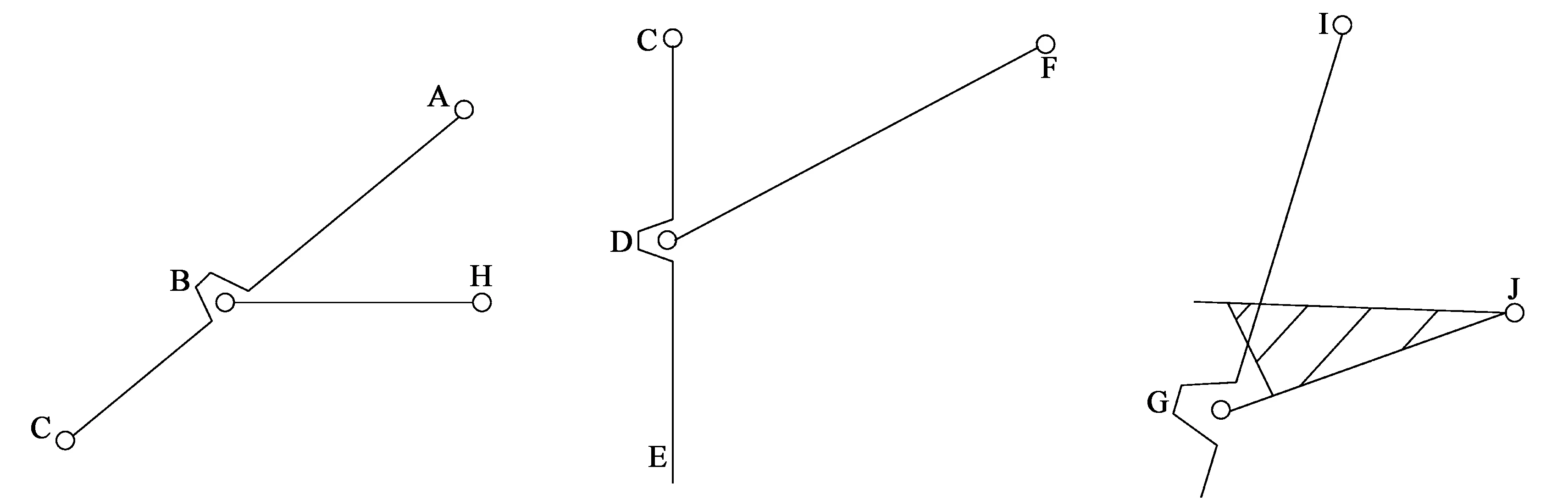
图2 拆分后的3个基本Ⅱ级杆组
1.2 传动机构的结构方案
奔跑马传动机构采用链条传动,人脚踏产生的动力通过链条传递给链轮,链轮通过圆周运动传递给曲柄,进而传递到四条腿。链轮链条为它传递动力,各零件之间通过销钉连接实现各个腿之间的摆动,从而实现奔跑马的蹬地前进动作。
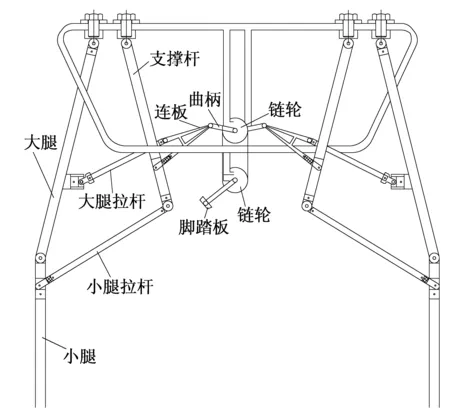
图3 奔跑马机构杆连接方式
奔跑马机构各杆连接方式如图3所示,其运动可以分为以下几个步骤:
(1)脚踏产生动力,通过链轮链条机构传递到曲柄上,使曲柄实现圆周运动;
(2)曲柄的圆周运动带动连板的摆动,连板将力分别传递到支撑杆和大腿拉杆上;
(3)支撑杆的往复摆动拉动小腿拉杆运动,进而促使小腿实现小幅度往复运动;
(4)大腿拉杆与大腿的关节连接用来给大腿提供动力,大腿拉杆的往复摆动实现大腿小幅度往复运动;
(5)大腿与小腿的复合运动使马腿产生相应的规律性姿态变化运动;
(6)连板与大腿拉杆和小腿拉杆之间通过铰支链连接,用来协调大腿和小腿的摆幅,使其具有马在行走过程中蹬腿和收腿的动作;
(7)小腿拉杆与小腿连接用来给小腿提供动力,小腿蹬地时产生的动力使马向前滚动。
2 机构杆件尺寸的确定及模型的建立
2.1 各杆尺寸的确定
马的运动轨迹是由小腿和大腿的运动轨迹共同叠加而形成的,大腿的运动是以机架为圆心的圆弧运动,小腿的运动则是以大腿与小腿交点C点为圆心的圆周运动,它们两个的运动共同叠加而产生马的运动轨迹曲线。在熟知奔跑马的整体运动轨迹后,对机构中各个杆件的长度进行计算,根据拟定高度和步幅经过多次试验,利用Pro/E初步设计各杆件的三维模型,装配后进行多次运动仿真分析及尺寸优化,确定了各杆的尺寸(参见图1):
AC=660 mm,BC=95 mm,CE=427 mm,CD=90 mm。
其它各杆的长度按照预定的运动规律要求,利用作图法的方式,经过多次的Pro/E动态仿真模拟,最终在满足各杆按预定轨迹运动的前提下确定其最佳尺寸、角度:
BH=225 mm,DF=370 mm,IF=350 mm,HJ=230 mm,
GJ=250 mm,JK=120 mm, ∠HJG=30°。
2.2 模型的建立

图4 奔跑马的三维模型
根据各杆件的设计尺寸,按照图纸首先在Pro/E中采用拉伸、打孔、倒圆角等命令建立各机构部件的模型,然后根据各个部件的相对位置关系,利用同轴、共面等几何约束关系将各机构部件装配起来,得到奔跑马三维模型如图4所示。通过奔跑马三维模型的建立为其后续运动学、动力学的分析及实物的加工制造奠定了基础。
2.3 理论应力计算
奔跑马腿的材料采用内径Φ22 mm、外径Φ26 mm的合金钢,材料密度ρ=7.9 g/cm3、弹性模量E=210 GPa、泊松比μ=0.25。连接各杆件之间的销钉采用20钢,许用切应力[τ]=30 MPa,直径d=6 mm,接触面积长度为15 mm,腿之间的最大拉力F=1 000 N[5]。根据销钉截面受力情况有两个剪切面受双剪切。由平衡关系得出截面上的剪力:
则销钉横截面上的切应力为:
(1)
式中A为销钉的截面面积。由式(1)可得销钉满足强度要求,不会因剪切发生断裂[6]。
2.4 奔跑马实物模型的建立
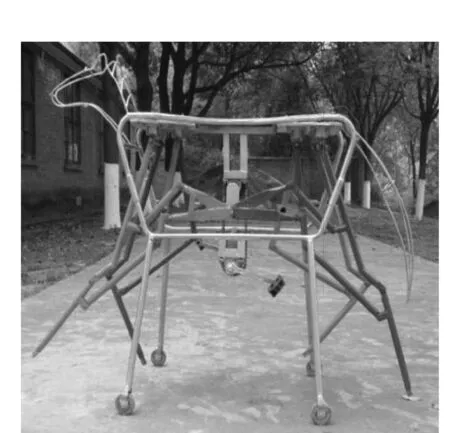
图5 奔跑马实物图
在满足奔跑马整体构件强度、刚度和保证承重至少100 kg的要求下,考虑连杆机构传动路线长,误差累计大,取机械效率为50%[4]。在保证奔跑马按预定轨迹运动的前提下,通过人蹬脚踏无法实现奔跑马实物样机在地上行走,故选用支架悬空马腿依靠压簧产生蹬地时向前的推力使机构向前运动。最后对奔跑马的外观进行优化设计,使其更加美观,加工出来的奔跑马实物如图5所示。
3 运动仿真及结果分析
为了从原理上说明奔跑马机构设计的可行性、合理性,在建立好奔跑马机构三维模型的基础上,利用Pro/E软件的Mechanism模块对奔跑马进行运动仿真,完成位置分析和运动学分析。通过对机构进行动态仿真,观察模型各杆件运动轨迹是否合理及杆件之间是否存在干涉问题,并提出修改措施。仿真过程及结果如下:
(1)伺服电机设置。在“应用程序”→“机构”中定义伺服电动机,提供运动分析动力源。选择曲柄处的销钉连接轴作为原动力输入的转动中心,定义伺服电动机ServoMotor1的速度函数为A=10 (°)/s,则曲柄转动一个周期为36 s。
(2)绘制奔跑马小腿与地面接触点、大腿和小腿关节连接点的运动学曲线。人脚踏蹬一圈曲柄转动一周,奔跑马向前运动一个轨迹曲线。对奔跑马小腿和地面接触点、大腿和小腿关节连接点的位移、速度和加速度进行测量,可直接描述奔跑马的蹬地伸展和钩腿动作,将0~36 s内两点的360组位移、速度和加速度测量值导入到Excel里,绘制出小腿、大腿上两点的运动学曲线,如图6—8所示。
(3)运动轨迹干涉检测。机构运动学分析完以后,通过“分析”→“回放”→“碰撞检测设置”→“全局碰撞检测”,验证了奔跑马仿真过程中没有干涉,说明各杆件连接方式的合理性和建模装配的精确性。
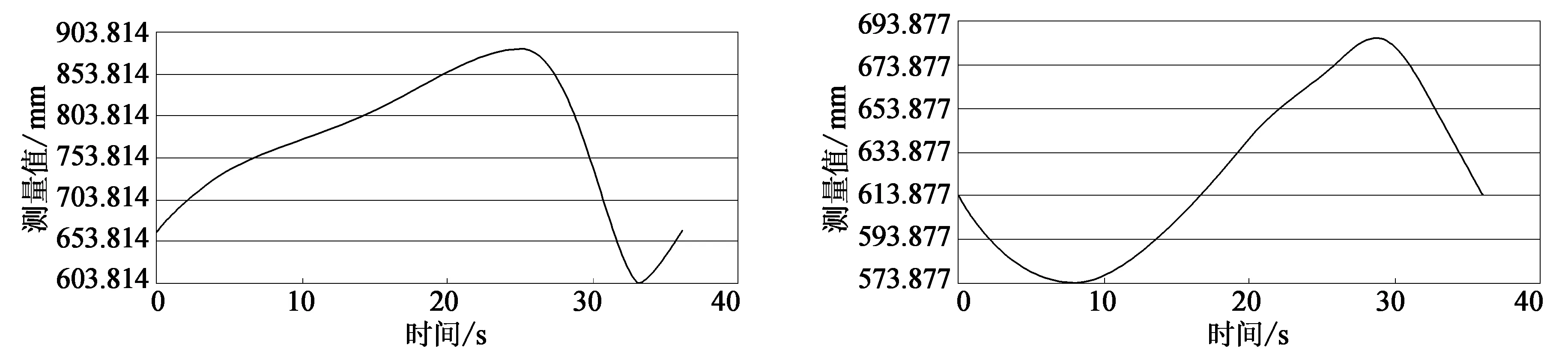
(a)小腿和地面接触点的位移曲线 (b)大腿和小腿关节连接点的位移曲线

(a)小腿和地面接触点的速度曲线 (b)大腿和小腿关节连接点的速度曲线
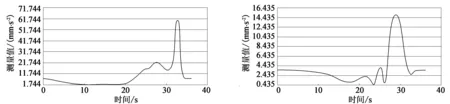
(a)小腿和地面接触点的加速度曲线 (b)大腿和小腿关节连接点的加速度曲线
从图6可以看出,奔跑马运动一个步幅时,小腿、大腿位移曲线变化平滑,没有突变现象,在垂直方向位移分别变化280 mm和113 mm。小腿在25 s达到最高点,33 s降到最低点,在这两个时间点左右,小腿姿态转化较大,速度、加速度曲线转折明显有突变现象(见图7、图8),原因是由于小腿达到最高点时,小腿拉杆受压严重,小腿达到最低点时与地面碰撞产生了接触应力,因此导致速度、加速度变化不稳定。
大腿在8 s处于最低点,28 s达到最高点;在8 s左右速度有突变现象,而加速度变化平缓;在28 s左右速度、加速度转折变化明显。分析8 s的速度、加速度变化与理论分析有偏差,28 s左右大腿达到最高点,姿态变化较大,速度、加速度波动较大,符合理论分析结果。通过以上对奔跑马的运动学分析,可以确定奔跑马各个杆件的具体位置姿态、速度以及加速度,为后续奔跑马机构的动力学分析以及进一步优化设计奠定了基础。
4 结 论
(1)奔跑马传动机构是一种新型的健身机构,具有结构新颖、原理独特、运动逼真等特点,将马的运动轨迹以及它的钩腿动作淋漓尽致的表达了出来。
(2)根据机构运动简图,运用运动仿真及动态作图法确定了各杆件的尺寸,满足了奔跑马的运动轨迹要求。
(3)奔跑马实物的加工制造验证了机构设计原理的正确性与可行性,后期将选取合适的材料确保奔跑马实物既轻巧又实用,并对外观进行优化设计使其更加美观。
(4)目前只研究了奔跑马机构的运动学分析,后期将致力于机构进一步结构优化、解析法及动力学分析的研究。
[参考文献]
[1] 张守权.浅议仿生学原理在机械设计领域中的应用[C]//司岩.科学时代——2014科技创新与企业管理研讨会论文集上(科技创新).北京:科技与企业,2014:52.
[2] 杜鹏东.仿生学及生物力学研究综述[J].林业机械与木工设备,2013,41(9):17-21.
[3] 李春艺.健身马的设计与研究[D].沈阳:东北大学,2008.
[4] 孙恒,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2006:13-110.
[5] 吴宗泽,罗圣国.机械设计课程设计手册[M].北京:高等教育出版社,2006:24-30.
[6] 刘鸿文.材料力学[M].北京:高等教育出版社,2004:49-54.
[7] 谭姝.平面连杆机构仿真系统的设计[J].农机化研究,2005(3):182-183.
[8] 张洋.基于Pro/ENGINEER的机构仿真设[C]//十三省区市机械工程学会第五届科技论坛论文集,2009.
[9] 朱书启.仿生学原理在机械设计中的应用[J].河北农机,2013(5):56-57.
