基于证据理论的水声多目标优选方法
2014-03-25禹亮程咏梅陈克喆刘建新刘准钆
禹亮, 程咏梅, 陈克喆, 刘建新, 刘准钆
(西北工业大学 自动化学院, 陕西 西安 710072)
在水下鱼雷跟踪并打击潜艇过程中, 由于潜艇一般较鱼雷有更强的探测性能[1],潜艇一般会先发现来袭鱼雷并投放悬浮式、自航式诱饵等各类软杀伤武器,对鱼雷进行诱导欺骗。这些诱饵能够模拟潜艇的回波信号并按照特定机动情况进行运动, 使鱼雷误判偏离潜艇, 造成鱼雷航程的消耗或丢失真实潜艇,因此, 鱼雷反对抗技术应运而生。水声反对抗技术迫切需要能够对诱饵以及真实潜艇进行识别或优选,以实现对目标的精确打击。
水声目标优选是利用目标的多个属性及目标优选方法,对水下多个目标是潜艇的概率进行计算从而完成排序。而目前的研究多针对水下目标的声学属性进行识别角度的研究,主要从时频域特征出发[2-3],如尺度、亮点等角度对真实潜艇和虚假目标进行区别或分类,并提出了基于模型匹配法[4]等方法来对频谱进行分析。但应该注意到, 水声目标样本提取困难,目标特征提取冗余度高,加之现代电子技术的发展使得点源诱饵完全可以逼真地模拟回波几乎所有的时域、频域特征, 仅利用时频信息, 自导系统无法及时、正确地辨别目标与诱饵。因此, 仅从某种处理后的单一信号较难准确地对目标进行区别,还需从更高层面即从目标多个声学属性特征分析来进行优选排序。文献[5]使用灰色关联法(GROD)等对水下对象的最大威胁目标来进行优选。文献中缺少目标模型,结果的正确性难以确定。且其方法仅从效益型、成本型来对目标概率进行求解。而对抗环境下,真假目标各种属性建模不应简单从大或者小来简单衡量目标,应从目标的逼真程度来对目标建模。由此可以看出,一方面水下真假目标建模困难,对其优选所需特征属性需要展开研究;另一方面,针对对抗环境下的多目标优选问题尚无合适方法。
本文针对上述问题, 提出了结合目标声学属性及运动特征信息进行边跟踪边优选方法, 并基于证据理论实现多目标优选。首先建立目标声学模型与运动模型及误差模型,构建了合理基本置信指派函数, 提出了跟踪过程中水声目标优选方法框架,并根据经典对抗策略验证了该方法。仿真实验结果表明, 本方法能够有效对水声对抗环境目标进行优选辨识, 为水声对抗环境下多目标识别问题提供了新的思路和方法。
1 目标属性建模
1.1 声学属性
声诱饵能极其逼真地模拟潜艇的辐射噪声、回波反射、机动运动等特性。文献[2]指出了线列阵声诱饵与潜艇辐射噪声的区别在于指向性区别;潜艇目标强度随声波入射角度的变化而变化, 而诱饵模拟的目标强度取决于发射换能器的发射指向性。因此, 本文以此2个方面为例展开。
1.1.1 目标强度
潜艇的目标强度随声波入射角度的变化而变化,大量实测数据分析发现,潜艇目标强度随方位变化呈“蝴蝶”形分布[6]。自航式声诱饵在模拟潜艇目标强度时,要求换能器在保证较宽的发射指向性的同时兼顾模拟目标强度随声波入射角度的变化特性,难度较高,一般声诱饵能模拟的最大目标强度不会超过20 dB,本文假定其按常值分布。潜艇及诱饵的目标强度分别可按(1)式、(2)式近似计算:
(1)
(2)
式中:α为入射波舷角,TS0为正横反射声强,一般取25 dB,TSF1、TSF2分别代表潜艇与诱饵的目标强度。
1.1.2 辐射噪声
在潜艇尺寸远小于鱼雷目标二者距离的条件下,国内一般认为潜艇的辐射噪声是近似于各向同性,在不考虑杂波等干扰情况下,也即认为潜艇发射辐射噪声指向性是以圆形向外辐射[7]。实际上,国外亦有考虑发动机影响情况下等辐射噪声的分布[1],亦可据此建立模型。诱饵模拟的辐射噪声的指向性是由其发射换能器的指向性决定,假定诱饵的发射指向性为沿诱饵纵轴线左右两侧水平方向各为120°,其他方向无辐射噪声(辐射噪声盲区)[7]。潜艇与诱饵的辐射噪声分别按(3)式、(4)式计算。
(3)
(4)
式中:Vm为潜艇航速(kn)。
1.2 运动属性
1.2.1 逃出扇区时间
潜艇发现鱼雷后, 为躲避鱼雷自导的探测, 要尽可能逃离鱼雷探测扇区, 而诱饵则尽可能留在鱼雷扇区以诱惑鱼雷[1], 因而可认为, 逃出扇区时间越大的目标越有可能是诱饵, 反之则越可能是潜艇。因此, 计算目标逃出扇区时间, 作为真假目标判断的一个运动属性。同样,在此阵位下,可计算出最大逃出扇区时间tmax、最小逃出扇区时间tmin分别为目标速度方向远离雷目连线方向、目标速度方向垂直鱼雷最近扇区方向时的逃出时间。
1.2.2 目标弦角
在水下对抗与反对抗过程中, 根据经典对抗策略[8], 潜艇释放诱饵干扰鱼雷, 并且做远离鱼雷的机动。在只考虑运动方向的条件下, 使目标与鱼雷相遇时间最短的方向最有可能为诱饵。假定在Δt时间内, 鱼雷移动v·Δt的距离, 易得出目标方向与雷目方向相反, 应为最有可能为诱饵的方向, 反之为潜艇。定义雷目连线与目标速度方向之间的夹角为弦角,用α表示,即舷角越大, 是潜艇的概率越小, 是诱饵的概率越大。以此把目标相对鱼雷弦角作为第二个运动属性来进行建模。
1.3 传感器误差
不考虑海况、水声杂波等其他外界因素影响情况下,声学属性探测精度主要与自导扇面及探测距离有关。一般来说,在与目标特定弦角和距离下,鱼雷可最终确定目标的真伪。因此,对声学属性建立以下指数误差模型。
ηTS,SL=aTS,SL·(ηα+ηd)
(5)
(6)
(7)
式中:ηTS,SL为误差值,由弦角误差ηα和距离误差ηd二者共同作用。a为误差系数量级,由自导性能确定,可取0≤a≤0.5。α为雷目弦角,d为雷目距离,θ、u分别为自导扇面能准确识别目标所需的弦角常数和距离常数,σα和σd分别为由弦角、距离变化快慢而确定的函数方差值。
2 基于证据理论(DST)的目标优选
2.1 DST基本组合规则
设Θ为一个非空有限集合,R是辨识框架幂集2Θ中的一个集类,如有集合映射函数m:R→[0,1],满足下列条件
(8)
则称m(A)为辨识框架Θ上焦元A的基本置信指派函数。
假定辨识框架Θ上,有性质不同的2个证据B和C,其焦元分别为Bi和Cj,其基本置信函数分别为m1和m2,用DST组合
(9)

2.2 水声多目标DST优选算法
定义辨识框架Θ={潜艇(F1)、诱饵(F2)}。选用第1节4个属性作为证据, 分别构建相应的基本置信指派函数, 然后对声学属性、运动属性证据之间进行两两融合, 进而把声学属性结果与运动属性结果进行加权融合, 得到最终置信度即优选排序结果。
Step 1 构建各证据(属性)的基本置信指派
1) 目标强度TS(证据1)


(10)
目标基本置信指派为
(11)
式中:ηTS为目标强度的误差。
不确定置信指派构建如下
(12)
2) 辐射噪声的指向性SL(证据2)
与目标强度类似,构建辐射噪声量测值SLs与当前时刻雷目阵位目标分别为潜艇和诱饵的辐射噪声理论值SLFi之间的距离度量为

(13)
目标基本置信指派为
(14)
式中:ηSL为辐射噪声属性的噪声系数。
不确定置信指派为
(15)
3) 逃出扇区时间t(证据3)
分别计算目标与鱼雷在当前阵位下的逃出时间ts及在当前位置的最快逃出扇区时间tmin和最大逃出扇区时间tmax分别作为潜艇及诱饵的理论值。实际计算中,tmax可设最大阈值。
(16)
4) 目标弦角α(证据4)
与逃出扇区时间计算方法类似,计算出当前阵位的弦角αs,并与最大、最小弦角做差,分别作为目标为诱饵及潜艇的概率距离度量。
(17)
Step 2 根据置信指派函数的定义, 对其进行归一化:
(18)
(19)
式中:j表示各证据序号。
Step 3 各类属性证据按Dempster规则分别进行两两融合
(20)
式中:A和B分别为证据1(TS)和证据2(SL)的焦元,C和D分别为证据3(t)和证据4(α)的焦元。其中Fi≠ø,Fi⊆Θ
Step 4 运动属性与声学属性加权融合
声呐探测性能在不同距离和阵位的精度不同, 较远距离目标声学属性难以获得较为精确值, 随着距离渐进声学属性值逐渐精确。因此, 声学属性与目标最终概率存在较大的冲突问题,可设权重系数ω来对二者融合过程进行修正,ω与雷目距离有关,可根据自导探测性能试验确定。
(21)
3 仿真验证
假定鱼雷自导扇区为120°, 探测距离为3 000 m。潜艇沿扇区中线以v=20 kn匀速运动,在扇区内潜艇周围随机产生离散点,速度大小与潜艇相同,代表诱饵。潜艇与诱饵相对阵位均随机产生。对各距离条件下诱饵数据进行100次蒙特卡洛仿真,潜艇与诱饵优选识别结果如图1所示。可见,离散环境验证本方法能够对诱饵和潜艇进行优选辨识,潜艇与诱饵概率随距离增大呈减小趋势,与实际情况较符合。
根据经典对抗策略[11]建立水声对抗环境。以鱼雷位置在坐标原点, 速度方向朝水平正向。一真实机动潜艇, 初始时刻阵位为正横方位, 距离鱼雷1 500 m, 初始运动方向与水平正向夹角为85°、速度为12 kn、规避最大速为20 kn,3个诱饵分别沿与X轴正向成-45°、-85°、-135°以相同大小速度运动。
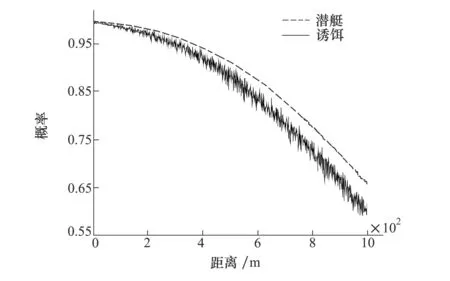
图1 潜艇与诱饵概率变化对比
使用本方法进行目标优选结果如图2、图3所示。图2为使用为不考虑目标运动属性情况下各目标为潜艇的概率,可以看出,在很多时刻假目标具有更大的概率。图3为包含目标运动属性的计算结果。可以看出,各个时刻目标基本上能够被正确的估计,只有在距离目标较远时,由于属性概率的不确定性增大而导致其估计结果逐渐降低。把各个属性概率作为目标最终概率计算依据,使用GROD方法结果如图4所示。可以看出,随着时间变化,目标距离鱼雷较远时,计算结果明显失真。因此可以得出,DS证据理论能够有效处理水声对抗环境多目标跟踪优选识别问题。
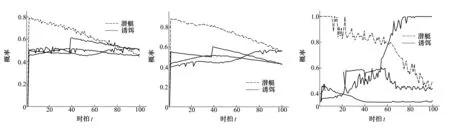
图2 不考虑运动特征的DS方法计算结果 图3 考虑运动特征的DS方法计算结果 图4 GROD方法计算结果
4 结 语
本文针对水声真假目标难以辨识的问题, 提出了结合目标声学信息及运动信息进行目标优选的思想,给出了目标优选应采用的属性,构建了各特征属性的隶属度函数, 继而提出了证据理论对水声目标识别的算法实现流程。离散环境和对抗环境仿真实验结果表明, 该方法可以有效识别真假目标, 能显著提高只根据声学特征信息进行正确识别目标的概率,并较传统GROD法在处理该问题上更为有效,为水声多目标识别提供了新的思路和方法。
参考文献:
[1] Pak Jungmin, Woo Donggi, Bonhwa Ku, et al. Target Search Method for a Torpedo to the Evading Ship Using Fuzzy Inference[C]∥ICROS-SICE International Joint Conference 2009, Japan: SICE, 2009: 5279-5284
[2] 王明洲, 郝重阳, 黄晓文. 基于相关法方位分析的水下主动目标尺度识别研究[J]. 西北工业大学学报, 2003, 21(3):317-320
Wang Mingzhou, Hao Chongyang, Huang Xiaowen. On Underwater Target Dimension Recognition Based on Bearings Analysis of Signal Correlation Feature[J]. Journal of Northwestern Polytechnical University, 2003, 21(3): 317-320 (in Chinese)
[3] J Acoust Soc Am. Perception-Based Automatic Classification of Impulsive-Source Active Sonar Echoes[J]. Journal of the Acoustical Society of America, 2007,122(3): 1502-1517
[4] 史广智, 胡均川, 笪良龙. 基于模型匹配的舰船螺旋桨噪声特征精细分析[J]. 声学学报, 2009, 34(5): 401-407
Shi Guangzhi, Hu Junchuan, Da Lianglong. Feature Fine Analysis of Noise Radiated Form Ship Propeller Based on Model Mat-ching[J]. Acta Acustica, 2009, 34(5): 401-407 (in Chinese)
[5] 王百合, 黄建国, 张群飞. 水下多目标跟踪系统攻击目标优选模型及算法[J]. 鱼雷技术, 2007,15(4): 22-25
Wang Baihe,Huang Jianguo,Zhang Qunfei. Model and Algorithm for Attacked Target Optimization in Underwater Multi-Targets Tracing System[J]. Torpedo Technology, 2007,15(4): 22-25 (in Chinese)
[6] 孟庆玉, 张静远, 宋保维. 鱼雷作战效能分析[M]. 北京: 国防工业出版社, 2003
Meng Qingyu, Zhang Jingyuan, Song Baowei. Analysis of Operational Effectiveness for Torpedo[M]. Beijing: National Defense Industry Press,2003 (in Chinese)
[7] 肖娟, 顾浩, 曹志敏. 声诱饵建模与仿真研究[J]. 计算机仿真, 2008, 25(11): 25-27
Xiao Juan, Gu Hao, Cao Zhimin. Modeling and Simulation of Acoustic Decoy[J]. Computer Simulation, 2008, 25(11): 25-27(in Chinese)
[8] Liang Kohsin, Wang Kueiming. Using Simulation and Evolutionary Algorithms to Evaluate the Design of Mix Strategies of Decoy and Jammers in Anti-Torpedo Tactics[C]∥Proceedings of the 2006 Winter Simulation Conference. Monterey, CA:IEEE:1299-1306
