基于自适应抗野值Kalman滤波技术的卫星导航接收机授时方法
2014-03-25何伟廉保旺杨琼
何伟, 廉保旺, 杨琼
(西北工业大学大学 电子信息学院, 陕西 西安 710072)
北斗卫星导航系统是我国自主研发的高精度定位系统,可以实现全球范围内的定位、定速以及授时功能。在北斗卫星导航接收机中,由卫星位置信息以及伪距信息可以解算出接收机的钟差信息,即接收机输出的1PPS的误差信息,通过对1PPS进行校正,即可得到精确的时钟信息。但是,由于电离层误差以及伪距采集精度的影响,由接收机解算出的钟差信息存在着较大的误差, 为了消除误差并提高授时精度,近年来有大量文献针对卫星导航授时算法进行了研究[1-2]。文献[3]中采用Kalman滤波技术对钟差信息进行滤波,提高了定位精度,但是该方法虽然对接收机晶振的频率误差进行了提取,但是并没有对其进行校正。在高动态条件下,码跟踪环路以及载波跟踪环路的抖动会对钟差解算结果造成较大误差,甚至引起滤波器发散。在文献[4]中提出了一种自适应抗野值Kalman滤波算法,但是该自适应抗野值算法对于连续出现的野值的抗干扰能力有限。针对以上问题,本文提出了基于自适应抗野值Kalman滤波技术的卫星导航接收机授时方法。该方法可以有效地消除在高动态条件下钟差信息野值对于接收机授时系统的影响,同时通过频率校正环路对秒信号发生器的频率进行校正,提高了授时精度。利用自主研发的北斗卫星导航接收机进行实验,实验结果表明该方法可以有效的提高北斗卫星导航系统在高动态条件下的授时精度。
1 授时实现原理
卫星导航接收机可以解算出卫星的位置信息以及相应的伪距信息,如图1所示,当卫星数目大于等于4颗时,利用最小二乘法可以解算出卫星接收机的钟差信息[5]。以解算出的钟差信息为观测量进行自适应抗差卡尔曼滤波,得到钟差以及钟漂的估计值。将钟差以及钟漂的估计值转换取整后反馈回秒信号发生器,分别调整秒信号发生器的相位控制字以及频率控制字,完成对卫星导航接收机精确授时功能,同时还可以对1PPS信号发生器的频率进行调整,弥补晶振频率误差造成的授时误差[6]。
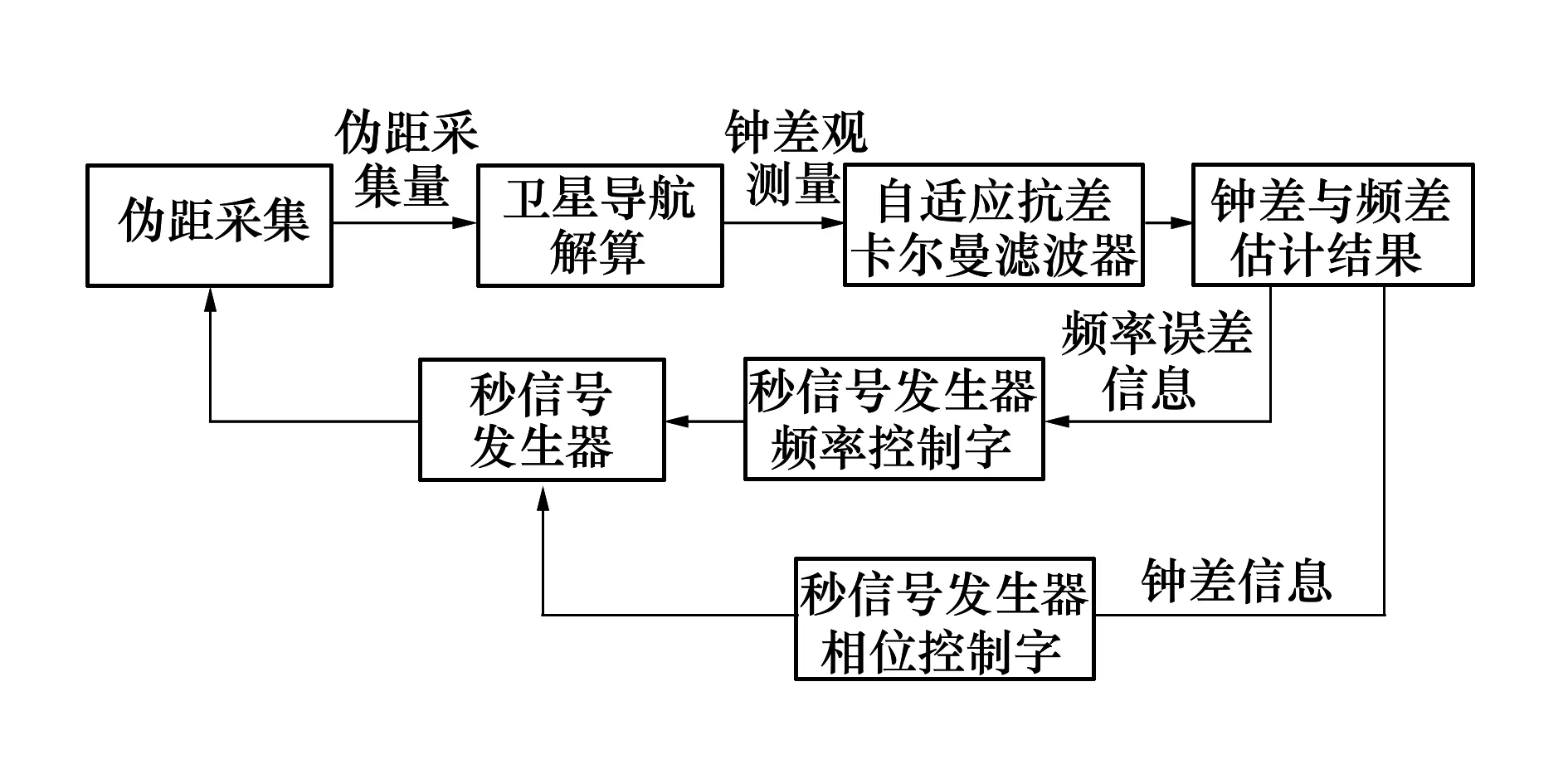
图1 授时原理图
2 自适应抗野值Kalman滤波器的设计
Xk=ΦXk-1+R
(1)
(2)
系统的量测方程如(3)式所示,其中Y为系统的量测信息即由卫星导航结算模块得到的秒信号发生器的钟差信息。H为系统量测矩阵,如(4)式所示。Q为系统的量测噪声矩阵。
Yk=HXk+Q
(3)
(4)
滤波器的时间更新过程如(5)式所示,其中P为均方误差阵


(5)
滤波器的量测更新过程如(6)式所示,其中Kk为增益矩阵
(6)

(7)
dk+1可以近似的由(8)式推导得到表示,其中Δd为残差增量,由(9)式表示,其中a、b为权重系数
(8)
(9)
由(7)式~(9)式得到自适应抗差门限Dk+1,如(10)式所示。
(10)
最终野值的判别可叙述为下式所示的假设检验问题,考虑到测量结果可能会有误差,故引入精度因子δ0来表征测量的精度,降低虚警率。
(11)
当H0成立时,说明系统中没有野值,则观测量选取值不变;当H1成立时,说明观测量中存在野值,将观测量yk+1用Dk+1代替,达到野值剔除的目的。该方法能够根据随机信号变化率的不同自动调节自适应抗野值判决的门限,当信号连续变化较快时提高门限,降低虚警率,当信号变化较慢时,降低门限,提高告警率。同时增加了门限值求解的阶数,提高了对连续出现的野值的判决能力。
3 仿真实验验证
为了验证设计的基于自适应抗野值Kalman滤波器的卫星导航接收机授时方法,设计了一组高动态条件下的北斗卫星导航系统定位与授时实验。实验的具体参数如表1所示。
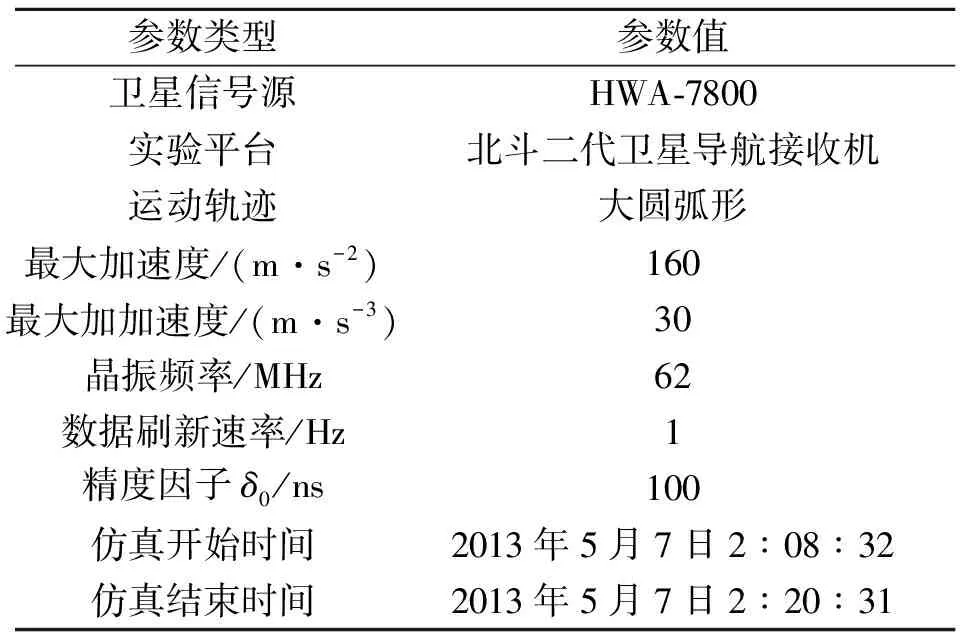
表1 仿真实验参数
由图2可以看到,在高动态条件下,与预设轨迹相比由接收机实际解算得到的轨迹在个别点出现了较大的误差,这些误差较大的野值点是由于高动态条件下码跟踪环路与载波跟踪环路抖动造成的。这些误差较大的野值点会对基于文献[3]授时算法的授时结果造成较大的扰动(见图3),出现较大授时误差的点与卫星定位的野值点基本吻合。当采用基于自适应抗野值Kalman滤波算法的北斗二代授时方法之后,授时精度得到大幅度提高(见图4),授时误差的均方差值为20.132 ns。对授时造成较大误差的钟差野值点剔除。设计的自适应抗野值Kalman滤波器在高动态条件下依然可以提供精确的时间信息。同时,提出的授时方法还可以对秒信号的频率进行校正,同时得到晶振的频率误差,如图5所示,测得北斗卫星导航接收机的晶振频率误差约为12 Hz左右。利用频谱分析仪对晶振的频率进行测量,测量结果为61.999 987 375 MHz,晶振频率误差的估计值与真实值基本吻合。

图2 接收机运动轨迹
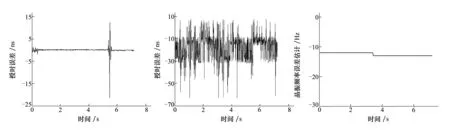
图3 基于文献[4]的授时算法的授时误差 图4 自适应抗野值Kalman滤波算法授时误差 图5 自适应抗野值晶振频率误差滤波值
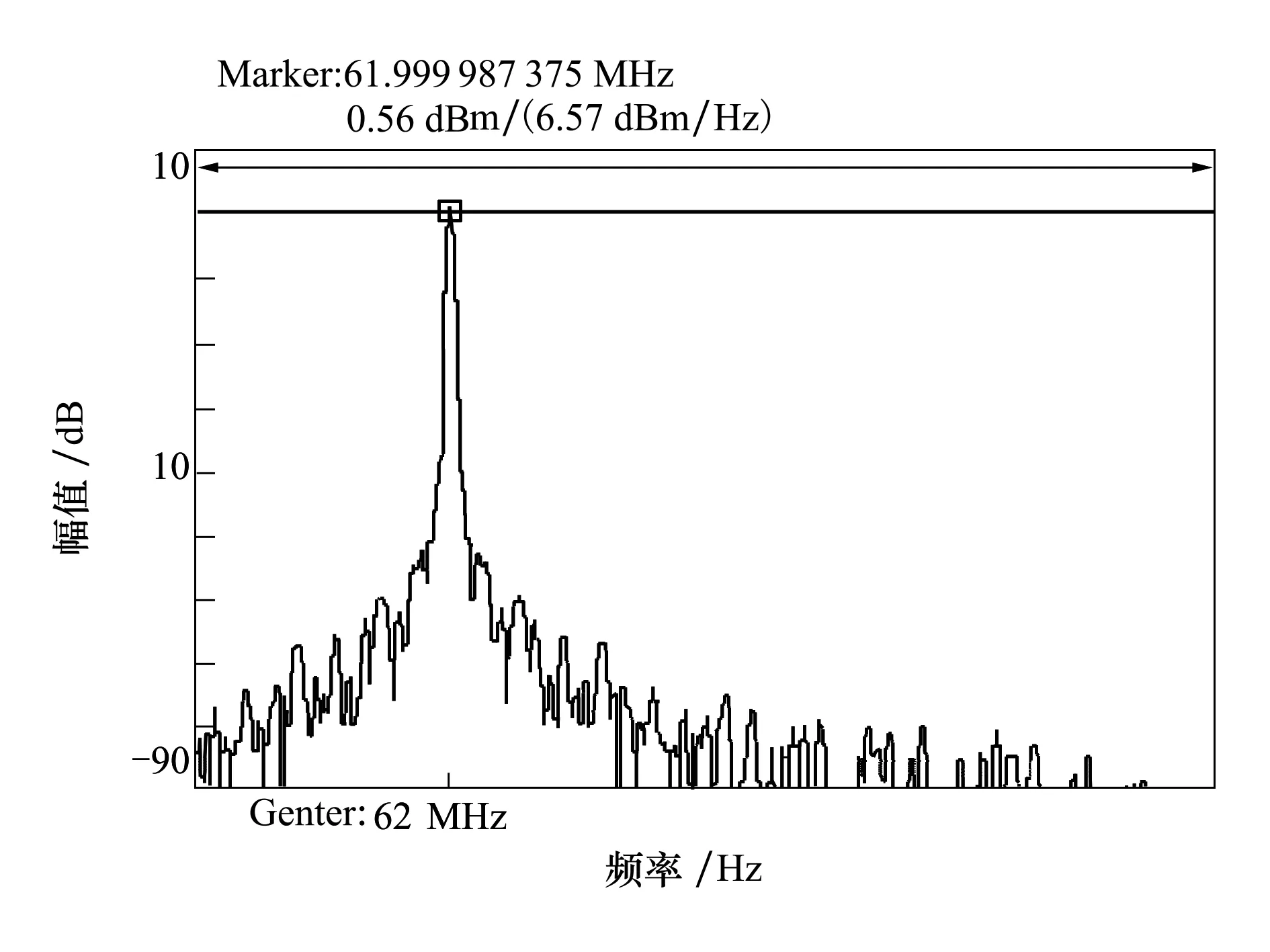
图6 晶振频率测量值
4 结 论
在高动态条件下,北斗二代接收机的码跟踪环路与载波跟踪环路精度降低,会对接收机的授时功能造成影响。本文提出的基于自适应抗野值Kalman滤波算法的北斗二代授时方法,可以动态地调整野值剔除阀值,增加对连续出现的野值的剔除能力。同时还可以对秒信号发生器的频率进行校正,更进一步提高了该授时方法的授时精度。实验结果表明,该授时方法可以自适应的剔除野值,并且相对于文献[3]中提出的传统的基于Kalman滤波算法的授时方法具有更好的抗野值性能以及更高的授时精度,同时该方法实现简单具有较高的工程应用价值。
参考文献:
[1] Weiss M A, Petit G, Jiang Z. A Comparison of GPS Common-View Time Transfer to All-in-View[C]∥Proceedings of the 2005 IEEE International, 2005: 324-328
[2] Lewandowski W, Petit G C, Thomas C. Precision and Accuracy of GPS Time Transfer[J]. IEEE Trans on Instrumentation and Measurement, 1993, 42(2): 474-479
[3] 李罡,吕晶,常江,戴卫恒,李广侠. 卡尔曼滤波卫星授时的仿真技术[J]. 解放军理工大学学报:自然科学版,2008,9(4):312-316
Li Gang, Lü Jing, Chang Jian, Dai Weiheng, Li Guangxia. Kalman Filter Satelite Timing Simulation Technology[J]. PLA University of Technology: Natural Science, 2008, 9(4): 312-3116 (in Chinese)
[4] 张帆,卢峥. 自适应抗野值Kalman滤波[J]. 电机与控制控制学报,2007,11(2):188-195
Zhang Fan, Lu Zheng. Robust Kalman Filter for Outliers Suppression[J]. Electric Machines and Control, 2007, 11(2): 188-195 (in Chinese)
[5] 廉保旺,赵楠,王永生. 北斗卫星定位算法研究[J]. 西北工业大学学报,2007, 25(1): 97-102
Lian Baowang, Zhao Nan, Wang Yongsheng. A Positioning Algorithm for the “Beidou” Navigation System[J]. Journal of Northwestern Polytechnical University, 2007, 25(1): 97-102 (in Chinese)
[6] 秦永元,张洪钺,汪叔华,等. 卡尔曼滤波与组合导航原理[M]. 西安:西北工业大学出版社,2004
Qin Yongyuan, Zhang Hongyue, Wang Shuhua, et al. Kalman Filter and Navigation Principle[M]. Xi′an, Northwest Polytechnical University Press, 2004 (in Chinese)
[7] 周福相,吴久银,吕晶. 基于多通道观测量精确定时的算法及实现[J]. 解放军理工大学学报:自然科学版,2007,8(4):328-332
Zhou Fuxiang, Wu Jiuyin, Lü Jing. Algortihm and Implementation of Precision Timing Based on Various Channels Information[J]. PLA University of Technology: Natural Science, 2007, 8(4): 328-332
