Niche贴近度的T—S模糊控制研究*
2014-03-14郝云力杨西梅
郝云力,杨西梅
(1.阜阳师范学院信息工程学院,安徽阜阳 236041;2.阜阳第三中学,安徽阜阳 236041)
0 引言
模糊控制是一种无模型控制方法,它是由专家构造语言信息并将其转化为控制策略的一种系统推理方法,因而能解决许多复杂且无法建立精确数学模型的控制问题,它是处理推理系统和控制系统中不精确、不确定问题的一种有效的方法.英国的Mamdani[1]提出模糊规则的后件是一个模糊集合,它有利于设计模糊控制器,但模糊系统的稳定性难以保证.Takagi和Sugeno[2]提出了一种新的模糊模型,其规则后件不是模糊集合而是一个多项式函数,便于采用传统的控制策略设计相关的控制器和对控制器进行分析;它给出了模糊系统的稳定性及保证稳定的设计方法,但缺乏实际的物理意义.
生态系统是一个非常复杂的大系统,其内个体间的相互作用、系统与外界的相互作用和抑制,使生态系统内在的动力学行为极难描述,但由于生态系统的冗余性和稳定性,使系统内的个体具备适应环境的能力,并始终朝着有利于个体生存的方向发展,最终使系统处于平衡状态.生态系统的这种稳定发展是与个体的生态位密切相关的.李医民等[3-4]利用生态系统的这种特性,将生态位与模糊控制相结合,提出了一种新的基于生物进化特性的模糊自适应控制方法.生态位包含两方面的内容:一是个体对生存环境的容忍性;二是个体对其所生存的空间开发利用的能力和占有新生环境的能力.有文献给出后件是一个具有生态位耗散结构的代数模型[2]和几何模型[3],反映了生物个体的自适应、自组织、自学习的能力,但没有进行稳定性分析.本文在此研究[2-4]基础上给出一个明确的生态位贴近度函数[5]作为零阶的Takagi—Sugeno模糊控制的后件,使之有了实际的生物意义.此贴近度函数避免了在控制中隶属度的取大取小计算,简化了模糊控制的步骤.使用梯度下降法对后件进行参数优化,并根据Lyopunov稳定性定理进行稳定性分析,最后通过对脑动脉瘤模型[6]的实例分析仿真验证此法.
1 基于生态位贴近度的T—S模糊控制
由于个体在其所生存的环境中的生长是通过反馈作用自动调节并趋于个体生长的最佳环境,这种调节是通过与外界环境因子的交流,达到个体生态位与理想生态位的某种指标的差异为零.本文将模糊贴近度函数改为

个体的生态位扩展是生物进化发展的决定性因素[7],也是生物适应环境、自我调节的量化描述.因此,将生物的这种特性融入到模糊控制中可以提高模糊控制的“智能”特性和容错性.
以个体的实际生态位H(Λ)与理想生态位H(Λ*)的贴近度函数作为模糊T—S模型的后件,构造一个新的模糊推理系统,其模糊规则如下:

其中:Ri表示第i条模糊规则;表示模糊规则的前件模糊集合;xi是输入变量;yi是第i条规则的输出变量;λ=(x1,x2,…,xn)代表实际状态;λ*=)代表生态位的最佳状态.每一条规则的含义是:如果系统处在实际状态时,那么规则的后件表示该状态与理想状态的相近度有多少.这种差异是由实际生态位H(Λ)与理想生态位H(Λ*)的贴近度函数

来表示的.
采用重心法,则整个模糊系统的输出为

取Gaussian型隶属函数

则高斯型模糊逻辑系统有如下形式:

由于该系统是在常规模糊T—S模型中,将控制规则的后件取为个体生态位贴近度的大小的一个含有正态分布的具体表达式,而规则的前件仍沿用常规模糊控制系统的前件,隶属函数采用Gaussian型.因此这样给出的模糊推理系统同样是一个万能逼近器.参见文献[8].
2 Niche T—S模型后件参数优化
基于Niche模糊T—S模型参数优化的反向传播算法已知的输入、输出数据(xp,dp),xp∈U⊂ℝn,dp∈V⊂ℝ的任务是确定形如(2)的Niche T—S模型的参数,使最小.假设m已知,通过调整λj,λ,σ,σj,xji,δji使ep最小.为讨论方便,用e,f,d分别表示ep,f(xp),dp.
采用梯度下降法调节λj,σj:
α为确定的步长.则

其中

则

同理有
其中

3 系统稳定性分析
本系统的后件是一个零阶的T—S多项式函数,由文献[8]知,输出为

则(1)是y=a0,(c1,…,cn全为零),由文献[9]的稳定性分析知.
令
则前面所述规则(2)可改写为
Ri:if x(t)is Mi,then˙x(t)=Aix(t),(i=1,2,…,m),
其中

则此模糊系统的输出表达式为

注 由于系统中的Ai形式比较特殊,以下讨论对这个系统不加选择的限制,只要求Ai为n×n矩阵.
定理1 对本文描述的连续模糊模型,如果存在一个共同的正定矩阵P,对于所有子系统均有

那么所要讨论的模糊系统的平衡状态是全局渐近稳定的.
证明 考虑标量函数V[x(t)]=xT(t)Px(t),它满足
(a)V(0)=0;
(b)当x(t)≠0时,V[x(t)]>0;
(c)当‖x(t)‖→∞时,V[x(t)]→∞,从而求得

4 实例仿真
通过对脑动脉瘤模型[6]的仿真来验证本文所提出方法的有效性.脑动脉瘤模型的表达式为

控制目标要求输出x去跟踪参考信号xd,因此问题是设计一个控制器u(t),使得x-xd收敛到零.也就是稳定下面的控制系统:

令x1=x,x2=˙x1=˙x,则上式等价于


对脑动脉瘤病人实施病情维护时,血压和血流量要保持在标准的稳定状态,不然易造成血管破裂或供血不足,加剧病人病情恶化.这里在舒张压一定且正常的条件下对收缩压和血流量实施跟踪监控.用x1表示血流量,x2表示收缩血压.对不同年龄段的脑动脉瘤病人来说,收缩血压和血流量是不一样的.以女性老人为例说明.在舒张压正常情况下,知正常理想的收缩压为11 970~14 630Pa,血流量为45mL(45mL/100g脑组织·min).取理想的血流量值λ(x1)=45kPa,σ=5,收缩血压值λ(x2)=100 kPa,σ=10.
因为人体脑部动脉的血压和血流量是在理想正常范围内及外波动的,根据专家语言建立如下模糊规则.
R1:如果血流量偏低且血压偏低,则病人会出现头晕、脑萎缩症状.
R2:如果血流量偏低且血压正常,则病人会出现两眼发胀,偶尔身体失控症状.
R3:如果血流量偏低且血压偏高,则病人会出现血管破裂症状,危及生命.
R4:如果血流量正常且血压偏低,则病人会出现头晕症状.
R5:如果血流量正常且血压正常,则病人病情稳定.
R6:如果血流量正常且血压偏高,则病人会出现血管破裂症状,危及生命.
R7:如果血流量偏高且血压偏低,则病人会出现头痛、呕吐症状.
R8:如果血流量偏高且血压正常,则病人会出现感觉异常症状.
R9:如果血流量偏高且血压偏高,则病人会出现血管破裂症状,危及生命.
他们的隶属度函数分别为

和
对后件进行参数优化,选取λ(x1)=45,σ=5,则有

选取λ(x2)=100,σ=10,则有

取仿真参数w=1.8;F=2.1;μ=0.4;α=-1.1;β=1;γ=1;K=0.001;xd=1;d=10;q=0.01;λ=0.9;η=0.1进行仿真.
在控制器(10)中,利用本文提出的Niche模糊T—S模型构造模糊模型

采用Niche T—S控制,Willis系统的状态跟踪效果如图1所示.
5 结论
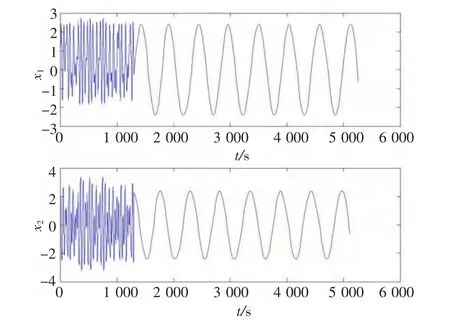
图1 Willis系统状态分量x1,x2跟踪图Fig.1 Status x1,x2of the Willis system component tracking map
[1] MAMDANI E H.Applications of fuzzy algorithms for simple dynamic plant[C].Proceeding IEE,1974,121(12):1585-1588.
[2] TAKAGI T,SUGENO M.Stability analysis and design of fuzzy control systems[J].Fuzzy Sets and Systems,1992,45:135-156.
[3] 李医民,胡寿松,李莉.智能温室系统的生态位控制方法[J].农业工程学报,2002,18(6):103-106.
[4] 李医民,胡寿松,李莉.基于生态位技术的FUZZY控制方法[J].系统工程理论与实践,2004,24(3):63-68.
[5] 李医民,郝云力.基于Niche的间接T—S模糊自适应控制[J].系统工程与电子技术,2011,33(10):2282-2287.
[6] AUSTIN G.Boomathematical of aneurysm of the circle of Willis,the dienffing equation and some approximate solutions[J].Math Bioscience,1971,11:163-172.
[7] 朱春全.生态位态势理论与扩充假说[J].生态学报,1997,17(3):324-332.
[8] 王晓梅,李医民.一种新的生态位的模糊控制方法[J].科学技术与工程,2007,7(24):6318-6322.
[9] 李永明.模糊系统分析[M].北京:科学出版社,2005.
[10] 徐颖.多时滞模糊系统的非易碎镇定[J].淮海工学院学报:自然科学版,2011,20(4):34-37.
[11] 黄逸彤,崔宝同.具有随机长时延与丢包的网络控制系统的随机稳定与镇定[J].淮海工学院学报:自然科学版,2013,22(4):22-27.
