近海工程船载式勘探平台系统创新与应用
2014-03-13胡建平
胡建平
(中交第三航务工程勘察设计院有限公司,上海 200032)
0 引言
近岸工程勘察主要涉及沿海、江河、湖泊等区域实施勘探工作,其中海上勘探受到的不确定因素最多,难度也最大,最能显示企业的综合勘探技术水平。只有确保勘探平台的稳定,才能有效实施海上勘探、取样,进而查明地层分布、地质构造、岩体的风化程度、岩土的物理力学性质等。随着我国经济高速发展及海外战略进一步实施,跨海大桥、海底隧道、离岸深水港口等各类近海设施迅猛增多。由于海上风、浪、潮、涌等因素,海上勘察环境复杂、勘察技术质量要求不断提高以及勘察市场竞争激烈,海上勘探核心技术平台系统的研究与设计,无疑成为工程技术人员最为关注的焦点。
针对近海工程水运勘察平台技术发展趋势,分析国内外现有的自升式和船载式两类勘探平台技术优劣。为突破船载式平台实施岩土体原状采样困难的技术瓶颈,加快我国近海勘察质量与国际标准接轨,参与海外市场竞争,开展船载式勘探平台系统性研究及创新。本文详细介绍中交三航院研发的可用于近海水域新颖船载式勘探平台系统[1-2]。
1 勘探平台分类
当前,通常采用自升式或船载式勘探平台实施近岸勘探,以欧美为代表的自升式勘探平台和我国独创的船载拼装式勘探平台难分伯仲,各有千秋。现对两类风格的海上勘探平台逐一介绍。
1.1 自升式勘探平台
自升式勘探平台有作业平台、桩腿和升降控制设备等构成,平台主体能沿桩腿垂直升降,它通常无自航能力,采用辅助船舶拖航移动。勘探作业前,拖航平台整体到达钻孔位置后,升降机构控制桩腿下降,伸入海底,进一步提升勘探作业平台,使之沿桩腿上升到一定高度,可避开浪、潮、涌对作业平台的影响,实施海上勘探、原位测试等。钻孔作业完成后,将平台主体下降至水面,利用水的浮力或冲桩喷射系统把桩腿从海底拔出、升起,然后拖航至另一孔位,继续下一个作业。自升式勘探平台,皆为多腿式,四腿式居多。升降驱动方式有齿轮齿条式及顶升液压式,齿轮齿条式升降装置的齿条沿桩腿布设,而与齿条相啮合的小齿轮安装在齿轮架上,并由电机或液压驱动;销子、销孔和压缸组成顶升液压式驱动。这种平台对水深适应性强,工作稳定性良好,见图1(西班牙“SUELOⅡ”勘探平台在古巴海域工程勘探,我方为监理单位),这类平台在欧美勘探市场上普遍采用,在我国沿海近岸勘探中却较少应用。主要原因表现在:
1)建造平台存在着高投入、高风险、高维护成本及大型工程支持等因素,一般企业难以承受;
2)为避免海床土质软弱不均,钻进过程产生的振动及变化无常的海况等因素所引起平台下陷,桩腿需预压及调整,故单孔完成时间较长;
3)关键部件研发及制造等核心技术为国外厂商拥有,难以降低建造成本[3-8]。

图1 古巴Cienfugos海域勘探Fig.1 Cuba Cienfugos sea exploration
1.2 船载式勘探平台
船载式勘探平台通常依托吃水较浅的机动船或驳船为载体搭建勘探平台,按其推进能力,分为自航或非自航式;按船型平台分布有舷侧、端部、船中和双体船勘探平台;定位通常采用锚泊式。它可以用现有的普通船舶(渔船居多)进行改装,排水量从数十吨至千吨不等,它具有船舶固有的航行安全标准和自航能力,因而能以较快的速度投入使用。
船载式勘探平台发展至今,因它的勘探综合成本远低于自升式勘探平台,而成为我国沿海近岸水运工程勘察的主流。但它的弱点也很明显,主要表现在平台稳定性弱,尤其是船舶的上下浮动,使得取土质量难以达到国际标准;当遇到水面上较强风、浪、潮时,会发生倾斜、摇摆、平移和升降现象,易走锚,给勘探带来困难。这些不利因素阻碍或降低了我国企业海外战略的实施与国际竞争力,由此提出了新颖单侧悬臂船载式勘探平台的设想。
2 单侧悬臂船载式平台关键技术
针对以上两类勘探平台所存在的问题,本着经济、合理、可行、符合国情的原则,以船载式勘探平台为突破口,创新一种独具匠心的单侧悬臂拼装式勘探平台[9],经过工程实践及不断改进及优化,逐渐形成了中国特色船载式勘探平台系统,综合性能优于国外同类产品,勘探成本远低于升降式平台,这对于中国企业突破欧美核心技术垄断,分享海外勘探市场份额具有重要战略意义。
新颖勘探平台的关键技术包括:平台模块设计、三钻机混合钻进法、泥浆循环回收设计、潮间带浮体平台开发等。
2.1 平台模块设计
勘探模块化、拼装式组装,产品通用性和移植性强,见图2。设计中优先选用单艘自航式小平底工程船舶,船舶艏艉各配1组起锚机,每组配置2~3个锚机;在工程船舶中部甲板上设2根型钢,多根支架横跨设于型钢之上,且伸出舷体一侧,在支架上铺设地板和槽钢,其中槽钢位置与型钢相对应,槽钢支架与型钢通过螺栓固定连接,支架和地板伸出船体的部分为工作区悬臂侧。钻塔设于单侧悬臂勘探平台上;勘探机具设备安放或固定在勘探平台上,包括位于工作区悬臂侧上的主动力钻机和位于船体上的泥浆泵等,由于模块化设计,整个勘探平台拼装过程在1~2 d内即可完成,从而快速形成一个海上移动勘探平台[10]。
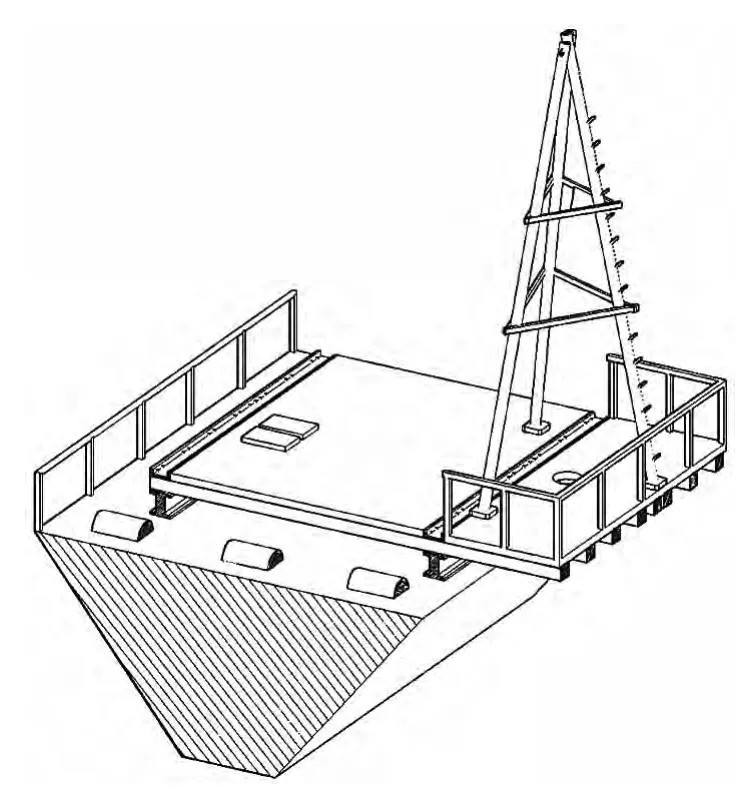
图2 单侧悬臂勘探平台Fig.2 Unilateral cantilevered exploration platform
2.2 三钻机混合钻进法
打破常规采用的单钻机钻进法[11-14],创新采用呈三角形分布的3台钻机混合钻进法。处于平台悬臂侧上的主动力钻机仅承担水下岩土钻进,平台另侧双台辅助多级变速卷扬钻机则轮流承担上下提引,各司其职,达到不间断提、卸钻杆,从而大幅度缩短海上勘探时间。在处理孔内卡钻、孔塌、埋钻等事故时,集中主、辅3台钻机的总提引力,快速起钻,从而提高海上勘探的安全性。首创的海上3台钻机混合钻进法,创国内水下软土钻进平均速率50m/3 h的最高纪录,该记录保持至今。
2.3 锚链交叉米字抛锚法
船艏、艉顺水流方向各抛1组锚,每组锚呈120°交叉状态,顺、逆水流方向,再抛1组锚,形成交叉米字分布。当水流湍急时,可采用一缆多锚技术(1根缆绳上系2个或以上锚)[15]。再配备抓力大、锚爪嵌土深、稳定性强、收藏方便、起锚附着泥沙少、冲洗方便的大抓力锚,使得锚泊牢固,从而大幅提升平台系统抗流能力。
2.4 泥浆循环回收设计
该系统设计了一套泥浆回收再利用循环辅助装置。该装置由旁通套管接头、管道、网状粗细过滤网、泥浆池、泥浆泵组成,并使套管与平台脱离。泥浆泵从过滤池中吸入泥浆压入高压导管,导管中泥浆通过钻杆、钻头(或岩芯管)被不断压入孔底,并和孔底被钻头切磨成散体状的土粒融合,形成土粒悬浮浆液,在泥浆泵不断送浆下,把孔底的土粒、砂土颗粒等持续地通过钻杆外侧沿孔壁和套管内上溢,浆液带至作业平台并流回泥浆池经双层过滤后得以循环使用,泥浆回收率可达95%以上,见图3。泥浆的循环使用,既节约了资源,又保护了勘探水域自然、生态环境。

图3 泥浆循环回收示意图Fig.3 M ud recycling chart
2.5 潮间带浮体平台
采用一种浮体单元和框架,分离式设计,平台大小可根据需要随意组合,立方体之间用插销固定,快速形成一个简易勘探平台,见图4。浮体平台运输便利、安装简便、移动快速、成本低廉,是可重复利用的非自航式水陆两用勘探平台[16],适用于海滩、涨落潮区域、近岸水域及搁浅勘探,以及河塘、水库、河浜等勘探作业,移动灵活,停泊便捷。

图4 水陆两用勘探平台正视图Fig.4 Amphibious exploration platform with front view
1)整个平台利用水的浮力和浮体单元承载作业人员和勘探设备,平台不受涨落潮影响,也不惧怕小的风浪。
2)整个平台表面设计考虑到勘探排水和防滑。
3)整个平台的浮体由若干个轻质、中空塑壳立方体拼装组合而成,制造材料和制作成本要求低且便于运输,有效降低浅滩、潮间带区域勘探成本。
4)作业平台采用拼装式设计,平台大小可根据需要任意组合,立方浮体之间用插销固定,平台立方体可采用双层叠加,以此大幅增加浮力。
浮体勘探平台是单侧悬臂拼装式勘探平台系统的补充和完善,从而克服了普通勘探平台难以同时兼顾深水区和滩地(潮间带)作业难题。整套系统的集成创新,降低了海上勘探成本高、易走锚等风险,并将气候影响因素大为降低;革新了近海工程现有勘察技术,使勘探有效时间延长30%以上;大幅提高了泥浆回收率,有效地保护了自然环境。
3 实施效果
单侧悬臂勘探平台系统[16]关键技术主要针对近海潮流、风浪、涌浪、依托条件等复杂的作业环境,以实现海上勘察安全、精度高、效率高、成本低以及保障工程建设质量等为目标而开发,整个系统同样适用于湖泊、河流、长江流域水上勘探。这些技术的开发研究依托洋山深水港区工程,该工程处于开敞海域,远离大陆30多km,海况恶劣、勘探量之大、工期之短、难点之多、技术要求之高在我国乃至世界近海勘探史上实属罕见。工程勘探从2002年持续至2011年,已累计钻孔4000多个,钻探总进尺达14万m,积累了大量各类数据,取得了多项核心专利技术,填补了国内多项空白。三航院开发的整套平台系统在洋山深水港区工程中得到全面应用,工程建设质量优良,一期到三期工程获得各类省部级以上奖项近20项,其中省部级科技进步一等奖1项、国家优质工程银奖2项、国家优秀勘察银奖1项等。
随着我国近海资源的开发利用以及国企海外战略进一步实施,凭借这套核心技术成果,已在境内外上百项工程技术竞争中获益,如港珠澳大桥工程(图5),马来西亚槟城二桥(图6),柬埔寨西港2×50MW燃煤电厂、越南河静钢厂、刚果(布)等海(水)域勘察工程。系统性能得到全面检验,如杭州湾跨海大桥工程中完成勘探孔最大入土深度为167m,完成所需时间为47 h;沪闵路—沪杭公路地方交通越江工程中完成勘探孔最大入土深度为130m,完成所需时间为35 h;马来西亚槟城二桥工程中完成勘探孔最大入土深度为120m,完成所需时间为30 h。受国家海洋局委托,2013年实施的厦门新机场海砂资源开采项目,勘探海域位于厦门岛东南侧45~50 km,大金门岛南侧30~35 km,距离龙海望海角35 km的东海海域,水深约26~40m,钻孔入土40m;海况风力达 7~8级,浪高达 1~2 m,勘探水域达50 km2;船载式勘探平台系统经受了严峻考验,采用全芯原状取样,完成了几十个钻孔,取样质量受到监方认可,这是我国水运水利行业首个200 nmile专属经济区海上勘探成功应用实例。

图5 港珠澳大桥勘探Fig.5 HK-Zhuhai-Macao Bridge exploration

图6 马来西亚槟城二桥勘探Fig.6 Malaysia Second Penang Bridge exploration
4 结语
集多项关键技术的船载式勘探平台系统解决了海上勘探成本高、易走锚等一系列难题,并使气候影响因素大为降低。在工程实践中该平台系统的技术性能得到了全面的应用、检验和完善,形成了一套较完整、可操作、低成本、高效益具有核心技术的近海工程勘探平台系统,工程应用前景十分广阔。
1)集多项关键技术的“船载式勘探平台系统”结合创新的“交叉米字分布法”等,使海上有效作业时间延长约30%,生产效率得到极大的提高。
2)采用就地取材,将型钢、木板、木方等平台框架及三角钻塔各类构件进行模块化设计(Component Design),便于集装箱运输,现场拼装组装,从而快速形成了一个水上勘探平台系统。产品通用性广、重复使用,最有效地控制了勘探成本。
3)整套海上勘探平台系统不仅可在滩地、海陆交界处、浅水区勘探作业,而且可满足水深达50m以内的深水区作业,同时满足湖、河、江、海等各种水运水利基础设施建设工程勘探的需要。
拥有完全自主知识产权,并具有中国特色的船载式勘探平台系统已跨出国门走向世界,并将会在国际勘察市场占有一席之地。
[1] 钮建定,胡建平.单侧悬臂浮船式勘探平台系统设计[C]//水运工程勘察设计创新方法论文集.北京:中国水运建设行业协会,2013:161-165.NIU Jian-ding,HU Jian-ping.Unilateral cantilever floating boatplatform system design exploration[C]//Waterway engineering survey and design innovative approaches to proceedings.Beijing:China Water Transportation Construction Association,2013:161-165.
[2] 胡建平,冯蓓蕾.洋山深水港区工程海上勘探关键技术实施[J].海洋工程,2012,30(3):164-169.HU Jian-ping,FENG Bei-lei.Key technology for overwater drilling of Yangshan Deepwater Port[J].The Ocean Engineering,2012,30(3):164-169.
[3] 张用德,袁学强.我国海洋钻井平台发展现状与趋势[J].石油矿场机械,2008,37(9):14-17.ZHANG Yong-de,YUAN Xue-qian.Development trend and status of offshore drilling platform in China[J].Oil Field Equipment,2008,37(9):14-17.
[4] 黄悦华,任克忍.我国海洋石油钻井平台现状与技术发展分析[J].石油机械,2007,35(9):157-160.HUANG Yue-hua,REN Ke-ren.Status and technology development of China's offshore oil drilling platform analysis[J].China Petroleum Machinery,2007,35(9):157-160.
[5] 赵尔信,蔡家品,贾美玲,等.海洋深水钻探船及取样技术[J].探矿工程(岩土钻掘工程),2009,36(S1):152-154.ZHAO Er-xin,CAI Jia-pin,JIA Mei-ling,et al.Deep-water drill-ships and sampling techniques[J].Exploration Engineering(Rock&Soil Drilling and Tunneling),2009,36(S1):152-154.
[6] 孙东昌,潘斌.海洋自升式移动平台设计与研究[M].上海:上海交通大学出版社,2008.SUN Dong-chang,PAN Bin.Marine self-elevating mobile platform design and research[M].Shanghai:Shanghai Jiaotong University Press,2008.
[7] 罗宏志,蒙占彬.国内深水自升式钻井平台发展概况[J].中国海洋平台,2010,25(4):4-7.LUO Hong-zhi,MENG Zhan-bin.General situation of deepwater self-elevating drilling unit develop in China[J].China Offshore Platform,2010,25(4):4-7.
[8] 吴永华.国内首创,组合式海上自航平台性能简介[J].中国修船,2012,22(6):164-169.WU Yong-hua.China initiative,self-propelled modular offshore platform performance Introduction[J].Chinese Ship Repair,2012,22(6):164-169.
[9] 钮建定,成利民,胡建平,等.单侧悬臂式水上勘探平台系统:中国,ZL200910194680.4[P].2012-05-30.NIU Jian-ding,CHENG Li-min,HU Jian-ping,etal.Unilateral cantilever type water exploration platform system: China,ZL200910194680.4[P].2012-05-30.
[10] 钮建定,胡建平.自航式水上移动平台关键技术[J].中国港湾建设,2012(3),19-21.NIU Jian-ding,HU Jian-ping.Key technology for self-propelled maritime moveable platform[J].China Harbour Engineering,2012(3),19-21.
[11] 李世忠.钻探工艺学[M].北京:地质出版社,1992.LI Shi-zhong.Drilling technology[M].Beijing:Geological Publishing House,1992.
[12] DL/T 0089—1993,地质钻探用钻塔技术条件[S].DL/T 0089—1993,Geological Drilling Rigs Technical Conditions[S].
[13] 常士骠,张苏民.工程地质手册[M].第四版.北京:中国建筑工业出版社,2007.CHANG Shi-piao,ZHANG Su-min.Engineering geology manual[M].Fourth edition.Beijing:China Building Industry Press,2007.
[14] 郭绍什.钻探手册[M].湖北:中国地质大学出版社,1993.GUO Shao-shi.Drillingmanual[M].Hubei:China University of Geosciences Press,1993.
[15] 王广东,丁宁,冠雄,等.海上浮体一缆多锚锚泊装置:中国,ZL200710060196.3[P].2009-12-16.WANG Guang-dong,DING Ning,GUAN Xiong,et al.Floating body of a sea anchor mooring cable multi-device:China,ZL200710060196.3[P].2009-12-16.
[16] 胡建平,钮建定,王照明.勘探平台(组合式水上勘探平台):中国,ZL201130462755.0[P].2012-07-04.HU Jian-ping,NIU Jian-ding,WANG Zhao-ming.Exploration platforms(combined water exploration platforms): China ,ZL201130462755.0[P].2012-07-04.
