AGV控制系统研究
2014-03-09夏田刘晔蒋晓阳
夏田,刘晔,蒋晓阳
(1.陕西科技大学机电工程学院,陕西西安 710021;2.中国兵器工业第二0二研究所,陕西咸阳 712000)
AGV控制系统研究
夏田1,刘晔1,蒋晓阳2
(1.陕西科技大学机电工程学院,陕西西安 710021;2.中国兵器工业第二0二研究所,陕西咸阳 712000)
以固高科技有限公司的GE-40-SV运动控制器作为AGV运动控制核心,采用BG1Z型增量式编码器采集电机转速及方向,利用PC作为公共平台,以VC++6.0作为软件开发工具,建立了AGV的控制系统,从而实现AGV直行、转弯、自转及调速等基本运动功能。
AGV;运动控制器;编码器
自动引导小车 (Automated Guided Vehicle,AGV)是柔性制造系统、现代仓储等自动化生产中不可或缺的物流设备,对AGV的控制研究对先进制造系统的发展有着重要的价值。
文中利用深圳固高科技有限公司 (以下简称:固高科技)的GE-400-SV运动控制卡[1],建立了实现AGV基本运动功能的控制系统。
1 AGV车身结构
AGV车身由步进电机、驱动轮、自由轮及车载电源等组成,如图1所示。
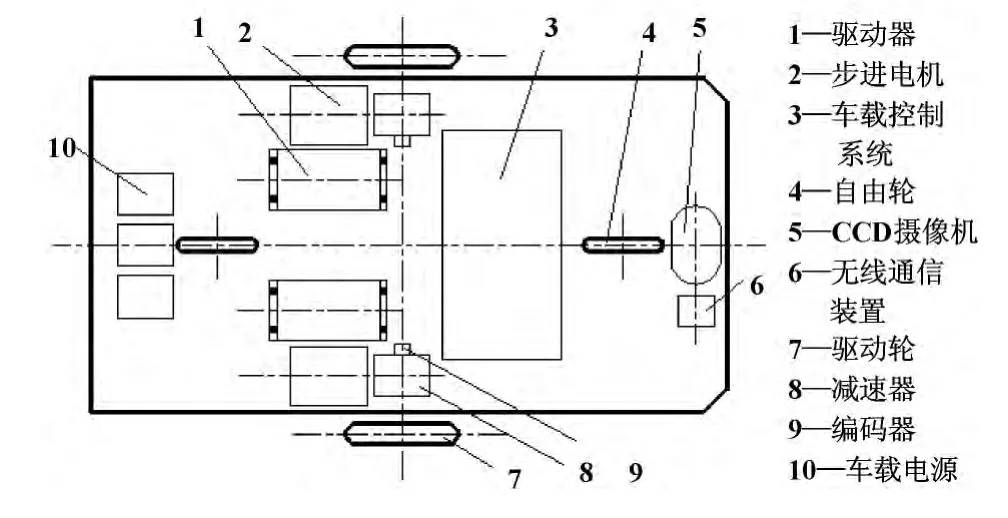
图1 AGV车身部分的构成
AGV为四轮结构,中间两轮作为驱动轮、前后轮作为自由轮。AGV采用两轮独立驱动,转向方式利用两轮电机差速转向。
采用步进电机单独驱动,由车载控制系统控制步进电机,通过减速机带动两驱动轮,实现两轮的差速驱动[2]。
2 AGV控制系统硬件
AGV运动控制采用“PC+运动控制器+步进电机”的模式来实现的,如图2所示。

图2 AGV驱动轮控制系统框图
如图3所示,AGV硬件系统主要由CCD传感器、图像采集卡、PC、路面标识符等组成。采用固高科技的GE-400-SV运动控制器[1]作为AGV运动控制核心,以PC作为公共平台,建立AGV控制的硬件平台。
运用该运动控制卡提供的S-曲线加减速模式[3]来控制轴的运动;选用WindowsCE嵌入式操作系统(固高科技的W_ce3.0版本)。将增量式光电编码器与运动控制卡连接应用,把编码器检测得到的信息反馈给控制卡。
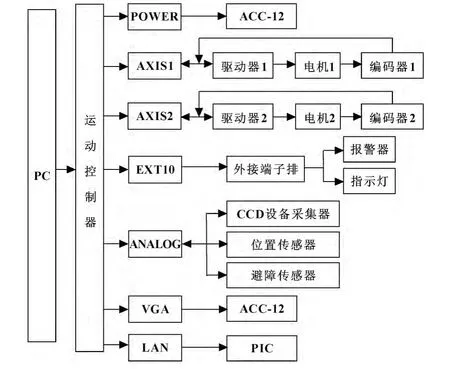
图3 AGV控制系统硬件结构
AGV控制系统用PC作为公共平台,在PC中嵌入GE-400-SV运动控制器,从而实现控制器对驱动电机的直接控制。
运动控制器的接口分配方面,POWER为电源接口;两个驱动电机分别由 AXIS1和AXIS2控制;EXT10是高速IO扩展接口,可以在其上外接端子板来实现各种输入输出的需要;ANALOG作为模拟量输入输出接口,直接与速度、方向以及超声波传感器连接作为速度、方向以及避障传感器;显示设备与VGA接口连接,可显示AGV的运动状态,从而实现人机交互的功能;AGV外部的信息交换由主LAN接口实现。
3 AGV控制系统软件
以WindowsCE操作系统作为软件开发平台,利用VC++作为软件开发工具。AGV控制软件主要包括手动和自动两个功能部分。手动主要是实现AGV的现场调试及在出现故障时候的处理。自动则是在AGV自身及周围环境条件满足的情况下,根据工作现场的数字化地图和上位管理计算机发出的任务指令统筹调度车辆,实现任务车辆的指定轨迹行走,准确、高效地完成预定作业任务,控制相关设备并及时进行自充电。
为了实现程序的可移植性,同时提高系统的应用性,对AGV控制软件进行了模块化设计,并分为多层结构,主程序实现整个系统的协调控制,子程序负责实现路径规划、状态判断等控制。如图4所示。
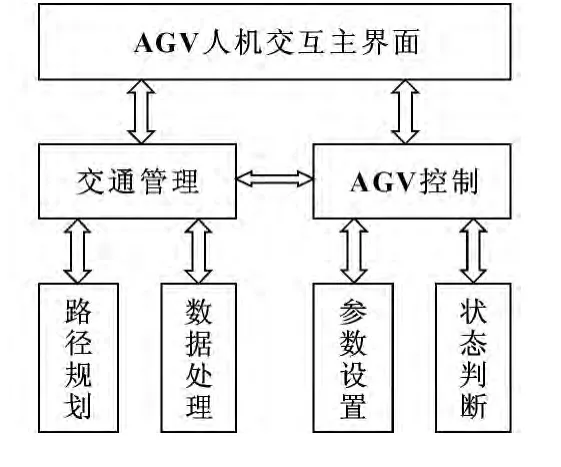
图4 AGV控制系统软件结构图
3.1 控制软件的实现方式
采用的是基于X86构架的普通PC机,安装的操作系统为WindowsCE,W_ce3.0版本;运动控制卡为固高系列运动控制卡,型号为GE-400-SV;运动控制卡直接插到PC机的卡槽,通过PC机中的控制系统软件调用运动控制卡的相关命令实现对AGV的控制。
AGV控制软件采用面向对象的Visual C++6.0作为软件编程环境[4],通过GE-400-SV运动控制器提供的驱动程序如GT400.h、GT400.lib、GT400.dll等,结合AGV自动导航、行走通信等实现控制软件部分[5]。
3.2 人机交互界面
人机界面是用户与系统交互的窗口,用户可以通过较为直观的图形界面获取系统信息,从而完成对AGV状态的监测、控制以及各种参数的合理配置等。
(1)AGV人机交互主界面
AGV人机交互主界面如图5所示。在此界面主要是完成软件功能模块的选择,主要功能模块为交通管理模块和AGV控制模块。
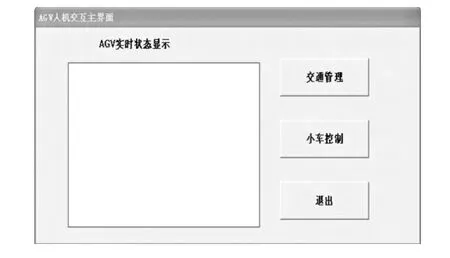
图5 AGV人机交互主界面
(2)AGV运动控制模块
AGV运动控制模块涵盖了AGV的所有功能指令,包括AGV的前进、后退及左、右转弯指令,自动/停止指令,AGV参数的设置,路径参数的相关设置以及通信设置等,AGV控制模块的界面见图6。
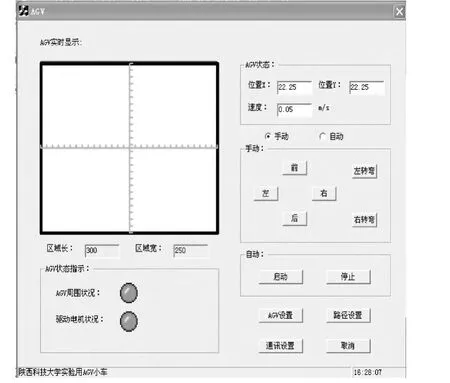
图6 AGV运动控制界面
进入AGV控制模块后,首先判断是选择手动或是自动模式:若选择手动模式,则AGV按照手动命令运行,此时为点动模式;若选择自动模式,则AGV进入视频采集与显示模块,判断AGV位置,若在可识别导引位置,则AGV正常朝着目标位置运行;若在可识别导引盲区,AGV不动且报警灯闪烁。另外,AGV车体本身判断正常后,在起步前还需要判断要前进的一定车距内的障碍物是否存在。如果检测到障碍物,AGV立即停车并报警;如果没有障碍物,对所采集到的图像进行处理,判别AGV具体位置,通过AGV当前位置信息对AGV进行导引,并进行调速控制。
(3)交通管理模块
交通管理模块,除了具有一般意义上的交通管理功能外,还包括车辆运行环境信息的录入、具体是哪些AGV或哪个AGV运行、目的地的选择及选用哪一种行进模式等。交通管理模块的界面如7所示。
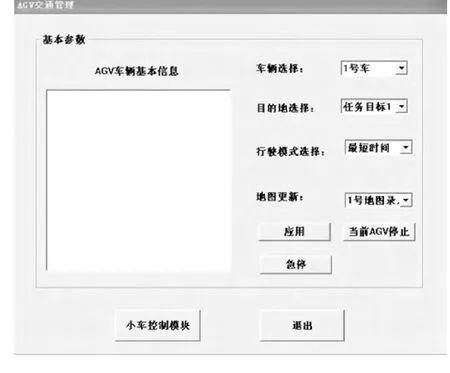
图7 交通管理模块界面
4 结论
以固高科技GE-40-SV运动控制器作为AGV运动控制核心,采用BG1Z型增量式编码器采集电机转速及方向,利用PC作为公共平台,以VC++6.0作为软件开发工具,建立了AGV的控制系统,结构简单、体积小、功耗低、产品易升级更新。
[1]Jung H-Kyun,Hong Suk_Kyo,Choi Hyoun-Chul,et al.Path Planning and Obstacle Avoidance of Robot Using New Wall-Following Algorithm[C]//Proc Asian Control Conf,Shanghai,2000:1628 -1633.
[2] SIEGWART Roland,NOURBAKHSH Illah Reza,SCARAMUZZA Davide.Introduction to Autonomous Mobile Robots[M].The Massachsetts Institute of Technology Press,2009:32-34.
[3]CHOW W M.Development of an Automated Storage and Retrieval System for Manufacturing Assembly Lines[C]//IEEE International Conference on Robotics and Automation.Proceedings,1986:490 -495.
[4]周鸣扬.Visual C++界面编程技术[M].北京:北京希望电子出版社,2008.
[5]王礴.GUC-GE400SV运动控制器编程手册:CPAC版本[M],2009.
Research of AGV Control System
XIA Tian1,LIU Ye1,JIANG Xiaoyang2
(1.Institute of Electrical and Mechanical Engineering,Shaanxi University of Science and Technology,Xi'an Shaanxi710021,China;2.Institute No.202 of China Arms Industry Goup Corporation,Xianyang Shaanxi712000,China)
Using GE-400-SV motion controller of Googol-tech Co.,Ltd.,asmotion control core,BG1Z incremental encoder to collect speed and direction signals,PC as the public platform,and VC++6.0 as software development tools,the AGV control system was setup.Thus some basicmovement functions of AVG likemoving straight,making turns,rotating,regulating speed were realized.
AGV;Motion controller;Encoder
TP273
B
1001-3881(2014)10-169-3
10.3969/j.issn.1001 -3881.2014.10.051
2013-04-09
咸阳市科技计划项目 (2011k08-13)
夏田 (1962—),女,硕士,教授,研究方向为数控装备。E-mail:517487883@qq.com。