数控伺服系统中噪声扰动信号的补偿控制方法
2014-03-09赵国勇安红静徐红芹
赵国勇,安红静,徐红芹
(山东理工大学机械工程学院,山东淄博 255049)
数控伺服系统中噪声扰动信号的补偿控制方法
赵国勇,安红静,徐红芹
(山东理工大学机械工程学院,山东淄博 255049)
加在数控机床伺服系统驱动单元的电气接口及元件上的各种噪声扰动信号,会降低进给伺服系统跟踪精度。分析噪声扰动对伺服系统跟踪精度的影响,提出一种针对噪声扰动信号观测与补偿的控制方法。仿真试验表明:所提出的方法能有效减小扰动信号影响,提高伺服进给系统的抗干扰能力。
伺服系统;噪声扰动;观测与补偿;跟踪误差
噪声通常定义为信号中的无用成分,噪声无处不在[1]。在数控机床及其周围环境中,噪声扰动是不可避免的,噪声扰动包括由温度变化引起的漂移以及各种电气扰动信号等。各种噪声扰动信号必然会降低伺服系统的跟踪精度。在数控机床控制柜中,一般采用接地技术、屏蔽技术、隔离技术来消除噪声扰动信号的影响[2]。
针对各种扰动信号设计扰动观测器并在伺服控制系统中进行补偿是一种减少扰动影响、进而提高系统鲁棒性的办法[3]。国内外许多学者针对伺服控制中扰动信号,进行了补偿控制方法研究。KIM等设计了一个模糊扰动观测器,用于多输入多输出系统的反馈跟踪控制,将模糊扰动观测器用于永磁同步电机的速度控制[4];RYOO等设计了一个鲁棒扰动观测器,在光盘驱动器系统的磁道跟踪控制中进行了实验[5];LU
等采用滑模重复控制理论研究了扰动信号观测器[6];董明晓等结合混合灵敏度设计方法,设计了数控机床伺服 H∞鲁棒控制器[7]。
文中分析了噪声扰动对伺服系统跟踪精度的影响,提出了一种针对噪声扰动信号观测与补偿的控制方法:通过检测加到伺服驱动器上的电压和伺服电机转动角位移,将噪声扰动观测出来,并将扰动补偿量叠加到位置控制器输出中实现补偿。针对典型锯齿波噪声扰动信号做了仿真试验。
1 数控伺服系统模型以及电气扰动影响
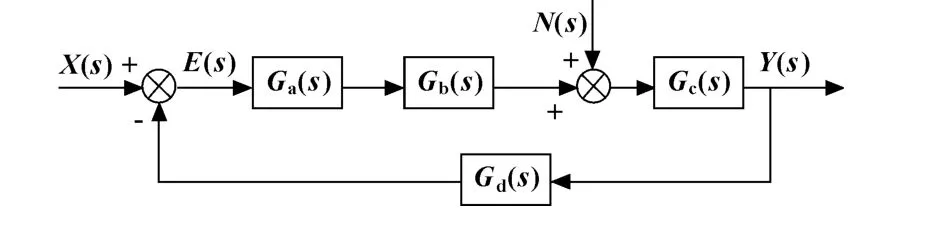
图1 带噪声扰动的进给伺服系统结构
先证明噪声扰动信号产生的稳态误差。将噪声扰动简化为阶跃信号n(t)=M·1(t),其中M为常数。取拉式变换,N(s)=M/s,由图1可得扰动作用下跟踪误差传递函数φe(s),再由终值定理可得在阶跃噪声扰动作用下稳态误差:

从式 (1)看出:噪声扰动信号产生的稳态误差与扰动信号本身有关,还与N(s)在进给伺服系统中作用点之前的部分有关。
2 噪声扰动观测与补偿方法
在图1所示的进给伺服系统中,加入噪声扰动观测和补偿环节。如图2所示,通过检测加到伺服驱动器上的电压信号和伺服电机转动角位移,将扰动信号N(s)观测出来,并将扰动补偿量叠加到位置控制器输出中实现补偿。
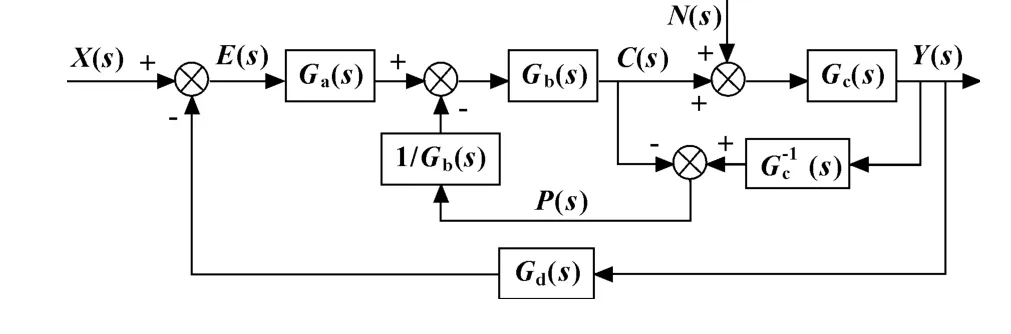
图2 噪声扰动的观测与补偿
在未加入噪声扰动以及观测补偿部分时,系统闭环传递函数为:
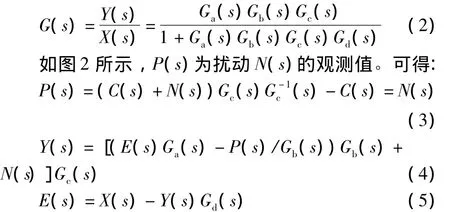
由式(3)—(5)可得加入噪声扰动以及观测与补偿器后系统闭环传递函数G(s),与式 (2)完全一致,说明图2所示针对噪声扰动的观测与补偿方法可以补偿扰动影响,提高系统抗干扰能力。
3 噪声扰动观测与补偿方法仿真
图2中Ga(s)为位置控制器环节,采用PID控制,比例系数为8.1,积分系数为0.002,微分系数为0.032。对噪声扰动进行观测补偿仿真研究时,设位置指令输入信号为2sin(0.4πt);噪声扰动为锯齿波信号,幅值为0.5,周期为2 s,如图3所示。
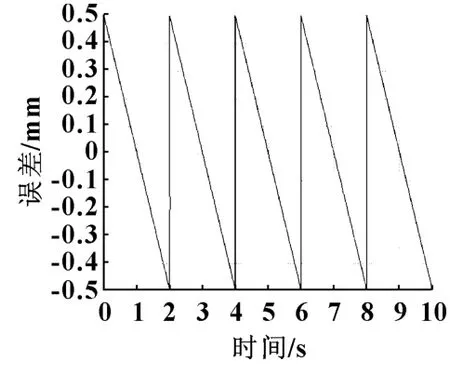
图3 典型锯齿波扰动信号
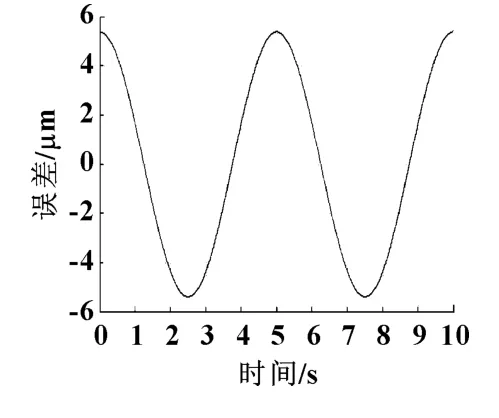
图4 未加扰动信号时跟踪误差
当不考虑噪声扰动信号时,伺服进给系统的跟踪误差如图4所示,系统跟踪误差在±0.006 mm范围内;当加入噪声扰动信号但不进行扰动观测与补偿时,跟踪误差如图5所示,系统跟踪误差在±0.02 mm范围内;当采用文中噪声扰动观测与补偿方法后,跟踪误差如图6所示,系统跟踪误差在±0.007 mm范围内。对比说明所研究噪声扰动观测与补偿方法,可有效提高伺服进给系统的抗干扰能力。
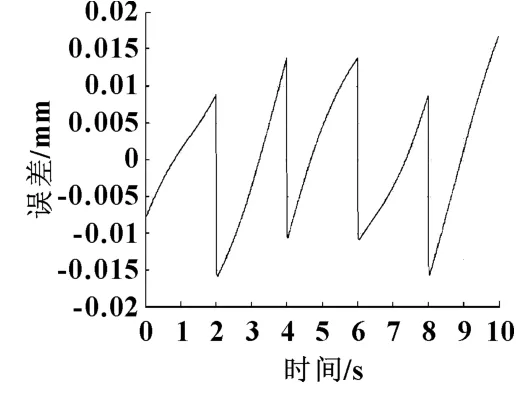
图5 加扰动信号未补偿时跟踪误差
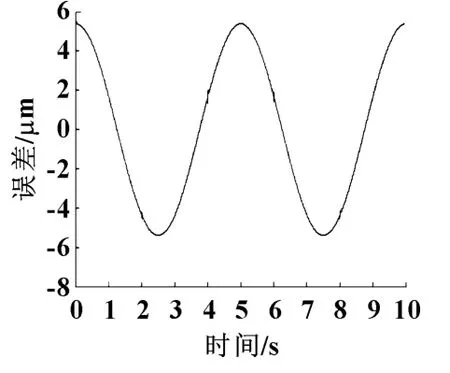
图6 加扰动信号并补偿时跟踪误差
4 结论
噪声信号无处不在,在数控机床伺服系统驱动器接口处,噪声扰动包括由温度变化引起的漂移以及各种电气扰动信号等。各种噪声扰动信号必然会降低伺服系统的跟踪精度。文中不是从硬件,而是从软件补偿角度,设计了一种针对噪声扰动的观测与补偿方法:通过检测加到伺服驱动器上的电压和伺服电机转动角位移,将噪声扰动观测出来,并将扰动补偿量叠加到位置控制器输出中实现补偿。针对典型锯齿波扰动信号的仿真表明:所提出观测与补偿方法能有效提高跟踪精度,提高系统抗干扰能力。该方法是对硬件抗扰动技术的一个有益补充。
[1] LIU Chunfang,XING Yinlong.Gantry Mobile Machining Center Magnetic Suspension System Fuzzy Synchronization Control Based on Disturbance Observer[J].Advanced Materials Research,2012,433 -440:7407 -7412.
[2]朱玉堂,许力.变频器的电磁兼容及抑制[J].机电工程,2005,22(5):40 -43.
[3]YIJingang,CHANG Steven,SHEN Yantao.Disturbance-observer-based Hysteresis Compensation for Piezoelectric Actuators[J].IEEE/ASME Transactions on Mechatronics,2009,14(4):456 -464.
[4]KIM Euntai,LEE S.Output Feedback Tracking Control of MIMO Systems Using a Fuzzy Disturbance Observer and Its Application to the Speed Control of a PM Synchronous Motor[J].IEEE Transactions on Fuzzy Systems,2005,13(6):725-741.
[5]RYOO Jung Rae,DOH Tae-Yong,CHUNG Myung Jin.Robust Disturbance Observer for the Track-following Control System of an Optical Disk Drive[J].Control Engineering Practice,2004,12(5):577 -585.
[6]LU Y-S,CHENG C-M.Disturbance-observer-based Repetitive Control with Sliding Modes[C]//IEEE/ASME International Conference on Advanced Intelligent Mechatronics,2005:1360-1365.
[7]董明晓,郑康平,王小椿.交流位置伺服系统的H∞鲁棒控制研究[J].机械科学与技术,2004,23(5):517 -518.
[8]金钰,胡佑德,李向春.伺服系统设计指导[M].北京:北京理工大学出版社,2004.
Compensation Control Method of Noise Disturbance Signals in CNC Servo System
ZHAO Guoyong,AN Hongjing,XU Hongqin
(Department of Mechanical Engineering,Shandong University of Technology,Zibo Shandong 255049,China)
The noise disturbance signals in CNCmachine tool servo system electrical interfaces and components will reduce the tracking accuracy of servo feed system.The influence of noise disturbances on the servo system tracking precision was analyzed,and a noise disturbances observation and compensation controlmethod was presented.Simulation results show that the proposed method can be used to effectively improve the tracking accuracy of servo feed system,and enhance the anti-disturbance ability.
Servo system;Noise disturbance;Observation and compensation;Tracking error
TG801
A
1001-3881(2014)10-156-2
10.3969/j.issn.1001 -3881.2014.10.047
2013-04-02
山东省高校科技计划项目 (J09LD51)
赵国勇 (1976—),男,博士,副教授,研究方向为机械制造及其自动化技术。E-mail:zgy709@126.com。