无人机地面运动的动力学建模及仿真
2014-03-01关永亮侯玉秀贾宏光刘波马伍元
关永亮,侯玉秀,贾宏光,刘波,马伍元
(1.长春理工大学 机电工程学院,吉林 长春130022;2.中国科学院 长春光学精密机械与物理研究所,吉林 长春130033)
0 引言
无人机以其体积小,造价低,使用方便,对使用环境要求低等特点,已经成为目前航空领域的一个热门研究对象。对无人机的研究一般都着重于对其飞行特性的研究,而随着现代无人机对地面运动特性的要求日益增高,对无人机地面运动特性的研究变得越来越重要[1-3]。
无人机地面运动特性通常是指,在地面运动过程中,无人机及其相关系统的几何学、运动学和动力学特性[4-5]。无人机在地面运动时,在各种作用力的作用下,无人机和轮胎的受力以及工作状况都会出现复杂的变化,这就要求对各种运动情况下的无人机及轮胎的受力情况都应有清晰的了解和准确的把握[6]。
国内外对无人机地面运动模型已经进行了广泛的研究,但目前的模型还存在以下4 个方面不足:
1)模型不能同时考虑无人机的6 个自由度,因此对无人机地面运动的考察不全面[7-8];
2)模型的未知数大于方程的个数[9-10];
3)没有考虑轮胎的弹性特性[1];
4)没有考虑空气动力对无人机地面运动的影响[1]。
地面运动稳定性是衡量无人机地面运动特性的重要指标,无人机翻倒和轮胎滑动是无人机地面运动过程中的多发事故。本文采用弹性轮胎理论,建立了无人机的地面运动模型,用于了解和把握地面运动过程中无人机及轮胎的受力情况,保证无人机在无翻倒和无轮胎滑动的情况下进行稳定的地面运动,提高无人机地面运动的稳定性。
1 无人机动力学模型
1.1 坐标系定义与基本假设
1.1.1 坐标系定义
1)地面坐标系(Oxyz);
2)轮胎坐标系(Otxtytzt);
3)机体坐标系(Owxwywzw).
1.1.2 基本假设
1)无人机模型为刚性模型,且质量为常数;
2)假设地面参考系为惯性参考系,即假设地面坐标系为惯性坐标系;
3)忽略地球曲率,即假设地球为平面;
4)假设机体xw轴和yw轴处于无人机对称面内。
1.2 轮胎模型
1.2.1 轮胎受力分析
在无人机地面运动过程中,轮胎要承受来自地面的多种作用力的作用,这些作用力具体包括:
1)地面支持力与滚动摩擦力
在地面运动过程中,无人机在重力作用下,轮胎与路面的接地印迹区域产生法向的相互作用力,即地面支持力Fg,使轮胎发生变形[11]。由于轮胎变形时材料的内摩擦产生弹性迟滞损失,使轮胎变形时所作的功不能完全收回,部分转化为热能损失在大气中;同时轮胎在接地印迹区域有摩擦损失,以及轮胎滚动对外部空气有搅动损失,这些能量损失都是产生滚动摩擦力Ft的原因。滚动摩擦力Ft与地面支持力Fg具有如下的关系式:

式中:μ 为轮胎的滚动摩擦系数。
2)侧向力与回正力矩
无人机在地面运动过程中,由于地面的凹凸不平对无人机产生颠簸,在操纵无人机进行转弯时,由于轮胎内压不平衡以及侧风的作用等原因,使得轮胎和地面之间产生侧向作用力Fl[11].轮胎在侧向力Fl的作用下会发生侧向变形。轮胎速度方向将不再沿着坐标系xt轴方向,而是与坐标系xt轴方向产生夹角θ[11],θ 称为轮胎的侧偏角。
侧向变形随着侧向力Fl的增加而增加,使得侧偏角θ 也增加,侧向力和侧偏角的之间具有如图1所示的曲线。从图1中可以看出,在一定范围内,侧向力Fl与侧偏角θ 具有正比关系[11],具体可以表示为

式中:c 为轮胎的侧偏刚度。

图1 侧向力与侧偏角关系图Fig.1 Lateral force vs.slip angle
侧偏角的存在表明轮胎的侧向变形量并不均匀。假设侧向力的大小与侧向变形量呈正比,那么侧向变形大的区域将会产生较大的侧向力,侧向变形小的区域将会产生较小的侧向力。侧向力的合力如图2所示,其作用点与轮胎接地印迹区域的中心偏离了一定的距离n,该距离被称为轮胎拖距。由于轮胎拖距的存在,侧向力就会对轮胎接地印迹区域的法线产生一个回正力矩M[11].M 与Fl具有如下的关系式:
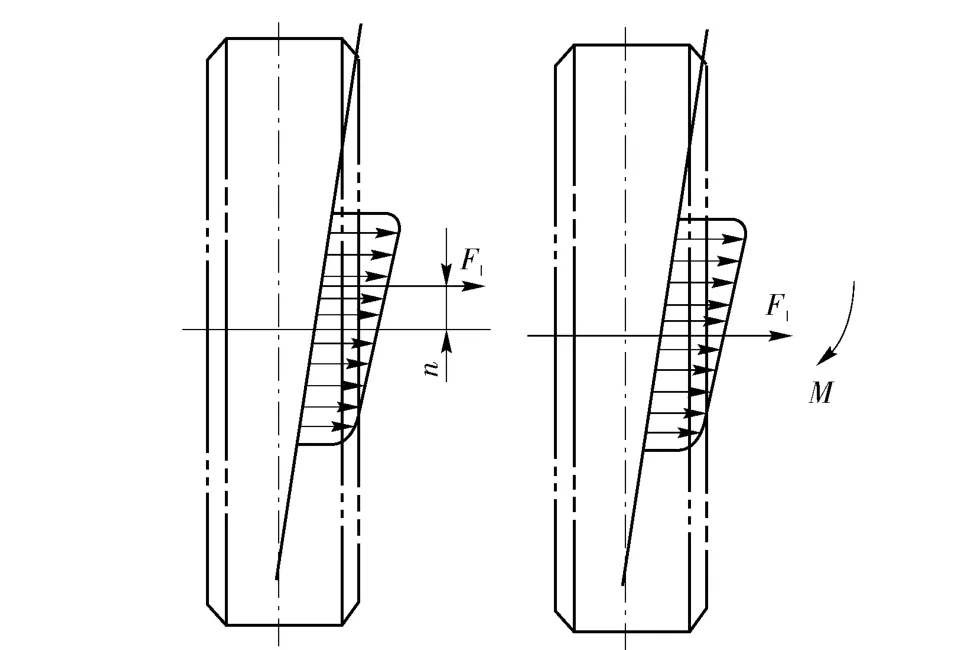
图2 轮胎变形图Fig.2 Deformation diagram of tire

式中:n 为轮胎拖距。
综上所述,在无人机地面运动过程中,以无人机为研究对象,轮胎将受到地面支持力Fg,滚动摩擦力Ft,侧向力Fl和回正力矩M 的作用。轮胎具有如图3所示的受力图。
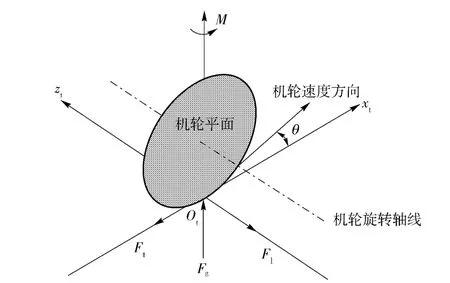
图3 轮胎受力图Fig.3 Force diagram of tire
1.2.2 轮胎侧向摩擦系数
轮胎和地面是一种附着连接,随时都有可能出现相对滑动,所能传递作用力的大小是有限的。作用力的大小由侧向摩擦系数衡量,侧向摩擦系数是与速度有关的变量,它们具有如图4所示的关系曲线。当最大侧向摩擦系数所能提供的最大作用力不能满足无人机地面运动的要求时,轮胎和地面之间就会出现相对滑动[12]。

图4 侧向摩擦系数与速度关系图Fig.4 Lateral friction coefficient vs.velocity
1.3 无人机模型
1.3.1 无人机受力分析
在地面运动过程中,无人机不仅要承受上述地面作用于轮胎的作用力,还要受到自身重力、发动机推力、空气作用力和惯性力等作用力的作用。无人机的受力情况如图5所示,无人机地面运动的几何关系如图6所示。
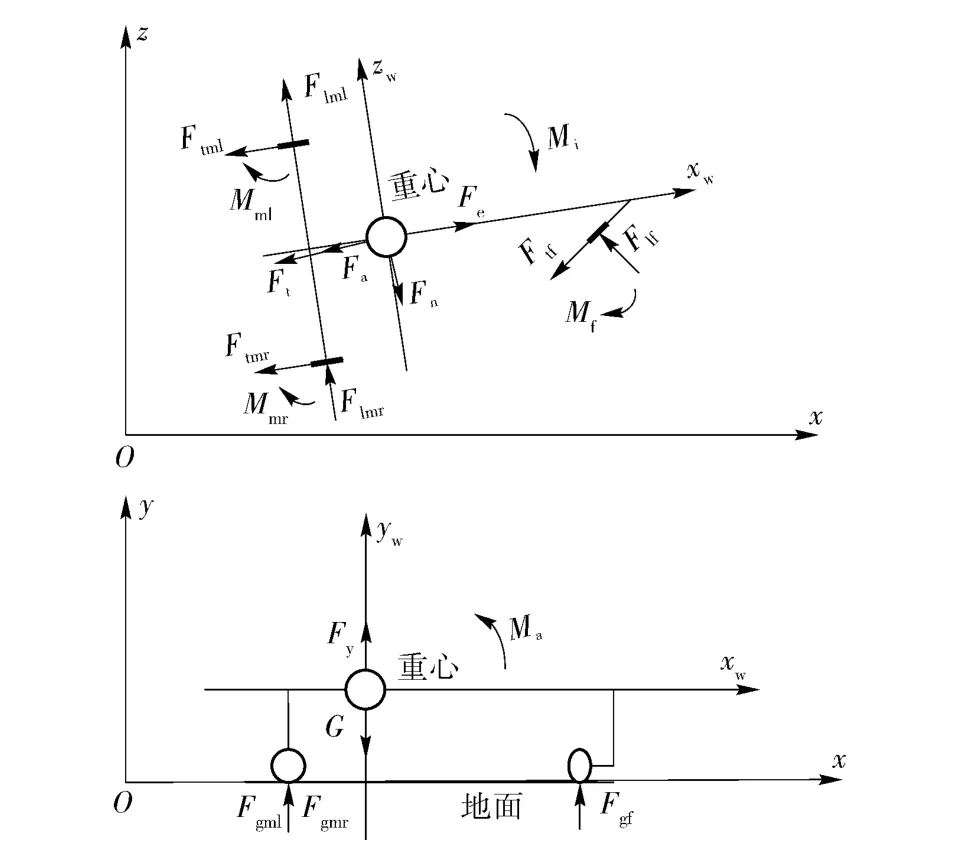
图5 无人机地面运动受力图Fig.5 Force diagram of UAV

图6 无人机地面运动几何关系图Fig.6 Geometrical relationship of UAV ground maneuver
图5所示的地面运动过程中,无人机所受到的作用力具体包括:
1)自身重力G,发动机推力Fe;
2)空气升力Fy,空气阻力Fa,空气力矩Ma;
3)地面作用于前轮、主左轮、主右轮轮胎的支持力Fgf、Fgml、Fgmr,滚动摩擦力Ftf、Ftml、Ftmr,侧向力Flf、Flml、Flmr和回正力矩Mf、Mml、Mmr.它们之间满足:
式中:μf为前轮轮胎的滚动摩擦系数;μml为左主轮轮胎的滚动摩擦系数;μmr为右主轮轮胎的滚动摩擦系数。

式中:cf为前轮轮胎的侧偏刚度;cml为左主轮轮胎的侧偏刚度;cmr为右主轮轮胎的侧偏刚度;θf为前轮轮胎的侧偏角;θml为左主轮轮胎的侧偏角;θmr为右主轮轮胎的侧偏角。
式中:nf为前轮轮胎的轮胎拖距;nml为左主轮轮胎的轮胎拖距;nmr为右主轮轮胎的轮胎拖距。
4)切向惯性力Ft、法向惯性力Fn和惯性力矩Mi.它们之间满足如下关系:

式中:m 为无人机的质量;v 为无人机重心的速度。

式中:γ 为无人机机体坐标系xw轴相对于地面坐标系x 轴的转角;β 为机体坐标系xw轴与无人机速度方向的夹角。

式中:J 为无人机相对于机体坐标系yw轴的转动惯量。
1.3.2 基本动力学方程
无人机能够进行6 个自由度的地面运动,其运动过程应该用6 个自由度方程来描述。为了能够完全描述无人机在6 个自由度的运动状态,根据图5所示的无人机受力情况与图6所示的无人机运动几何关系情况,分别建立3 个沿机体坐标轴xw、yw和zw的平动方程,和3 个绕机体坐标轴xw、yw和zw的转动方程。
1)沿机体坐标轴xw轴方向:

2)沿机体坐标轴yw轴方向:

3)沿机体坐标轴zw轴方向:

4)绕机体坐标轴xw轴:
5)绕机体坐标轴zw轴:

6)绕机体坐标轴yw轴:
1.3.3 几何方程
根据图6所示的无人机地面运动的几何关系图,可以建立如下4 个几何关系方程:
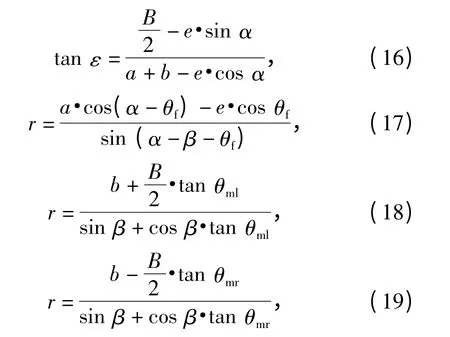
式中:r 为无人机的转弯半径;α 为前轮转角。
2 仿真分析
以某型号无人机的参数,对其地面运动过程中最容易发生事故的操纵前轮转弯过程在Matlab 软件中进行仿真。在仿真结果中提取影响无人机地面运动的4 个关键参数:前轮侧向力、主轮侧向合力和左、右主轮地面支持力。它们与前轮转角和无人机速度的关系分别如图7~图10所示。
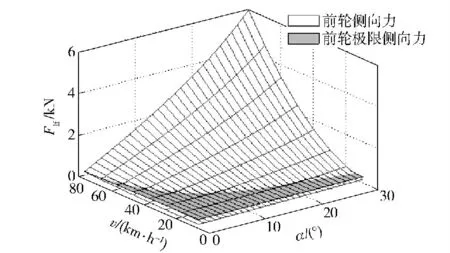
图7 前轮侧向力与前轮极限侧向力Fig.7 Lateral and limit lateral forces of front wheel
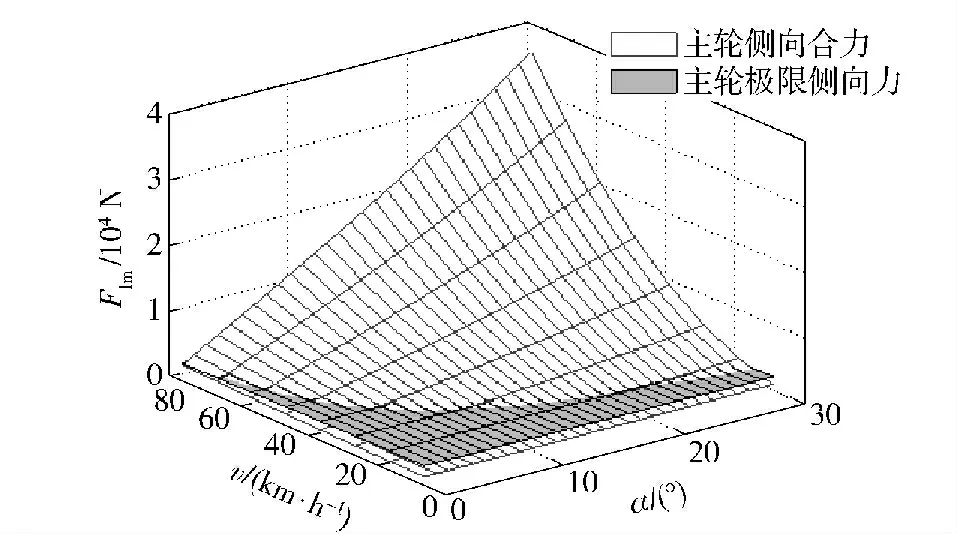
图8 主轮侧向合力与主轮极限侧向力Fig.8 Lateral and limit lateral forces of main wheel

图9 左主轮地面支持力Fig.9 Vertical force of left main wheel
从图7和图8中可以看出,随着前轮转角和无人机速度的增加,前轮、主轮侧向力也增加,当前轮转角和无人机速度增加到某一值时,前轮、主轮侧向力就会达到极限值。若前轮转角或无人机速度继续增加,前轮、主轮侧向力就会超过极限值,此时最大侧向摩擦系数所能提供的最大作用力不能满足无人机地面运动的要求,前轮、主轮与地面之间就会发生相对滑动。
从图9和图10中可以看出,随着前轮转角和无人机速度的增加,左主轮的支持力会减小,右主轮的支持力会增加,当前轮转角和无人机速度增加到某一值时,左主轮的支持力就会等于0,而右主轮的支持力仍然大于0.左主轮支持力等于0,表明此时左主轮已经不承受载荷,若前轮转角或无人机速度继续增加,无人机将沿前轮和右主轮连线(即图6所示侧翻轴线)翻倒。
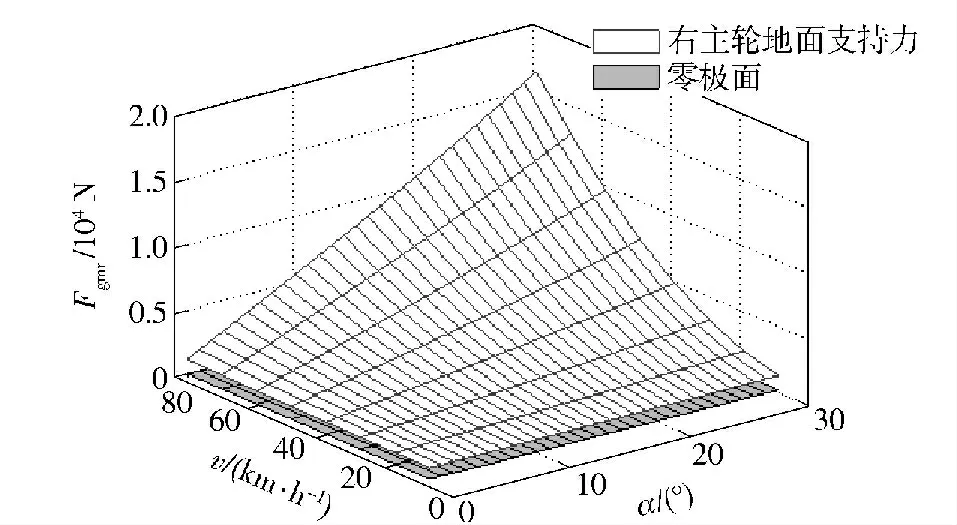
图10 右主轮地面支持力Fig.10 Vertical force of right main wheel
3 约束条件及可行域
3.1 约束条件
鉴于在地面运动过程中,无人机可能会出现前轮、主轮滑动和无人机沿侧翻轴线翻倒的情况,必须对某些影响无人机地面运动的参数加以限制。
3.1.1 限制前轮滑动
在无人机地面运动过程中,当最大侧向摩擦系数所能提供的最大作用力不能满足无人机地面运动的要求时,轮胎与地面之间就会出现相对滑动。为了防止前轮滑动,无人机地面运动过程中所需要的前轮侧向力应满足以下关系式:

式中:[Flf,l]为前轮极限侧向力。
3.1.2 限制主轮滑动
与前轮相同,为了防止主轮滑动,无人机地面运动过程中所需要的主轮侧向合力应足以下关系式:

式中:[Flm,l]为主轮极限侧向力。
3.1.3 限制无人机翻倒
在无人机地面运动过程中,最严重的事故是沿侧翻轴线翻倒。地面支持力Fg的值是判定无人机是否会翻倒的关键,当一侧主轮的地面支持力为0,即一侧主轮已经不承受载荷,另一侧主轮的地面支持力仍然大于0 时,则认定无人机有翻倒的趋势,此种情况要坚决避免,所以地面支持力Fg必须满足:

3.2 可行域
以同一型号无人机的参数在Matlab 软件中进行仿真,在约束条件下得到无人机地面运动过程中,不同速度下前轮转角和转弯半径的可行域,分别如图11、图12所示。图11中,曲线下方为不同速度下前轮转角的可行域;图12中,曲线上方为不同速度下转弯半径的可行域。
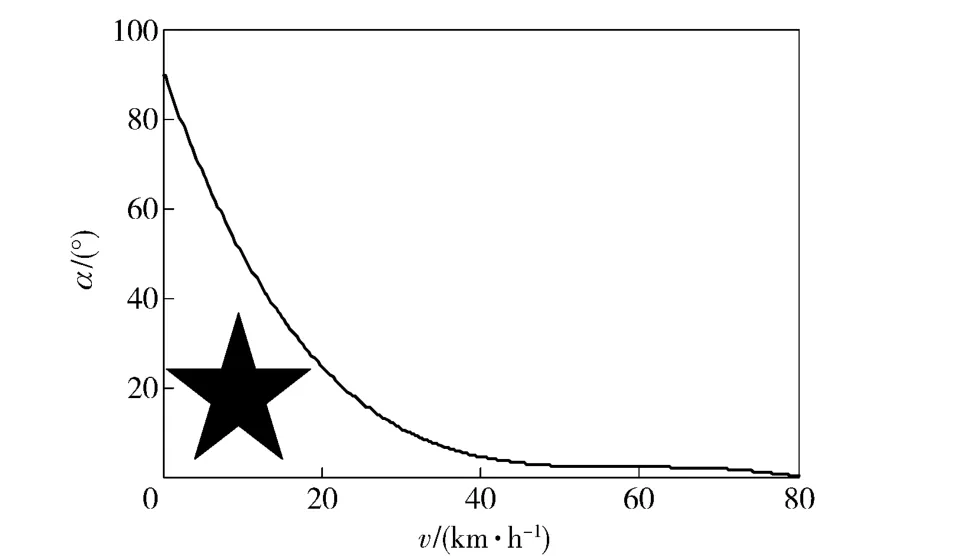
图11 前轮转角可行域Fig.11 Feasible region of turning angle of front wheel
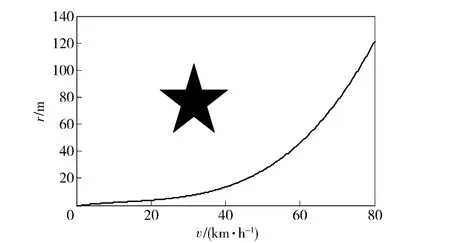
图12 转弯半径可行域Fig.12 Feasible region of turning radius
4 结论
本文通过分析地面运动过程中无人机的受力情况,采用弹性轮胎理论,建立了无人机地面运动的动力学模型。该模型考虑无人机地面运动过程中所要承受的来自地面、空气以及自身的作用力,描述了无人机的地面运动过程。应用某一型号无人机的参数在Matlab 软件中进行仿真,通过对仿真结果的分析,发现在无人机地面运动过程中,若对某些参数不加以约束,无人机会出现侧翻和轮胎滑动事故。因此,引入无人机地面运动模型的约束条件,重新进行仿真,得到了不同速度下前轮转角和转弯半径的可行域。
References)
[1] 顾宏斌.飞机地面运行的动力学模型[J].航空学报,2001,22(2):163 -167.GU Hong-bin.Dynamic model of aircraft handing[J].Acta Aeronautica et Astronautica Sinica,2001,22(2):163 -167.(in Chinese)
[2] 傅莉,王晓光.无人机近距离空战微分对策建模研究[J].兵工学报,2012,33(10):1210 -1216.FU Li,WANG Xiao-guang.Research on close air combat modeling of differential gams for unmanned combat air vehicles[J].Acta Armamentrii,2012,33(10):1210 -1216.(in Chinese)
[3] 傅阳光,周成平,胡汉平.无人飞行器海上航迹规划差分进化算法研究[J].兵工学报,2012,33(3):295 -300.FU Yang-guang,ZHOU Cheng-ping,HU Han-ping.Research on differential evolution for path planning for unmanned aerial vehicle in ocean environment[J].Acta Armamentrii,2012,33(3):295 -300.(in Chinese)
[4] 钱小妹.飞机操纵前轮转弯特性仿真研究[D].南京:南京航空航天大学,2008.QIAN Xiao-mei.Research on steering nose wheel aircraft by dynamic simulation[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2008.(in Chinese)
[5] Duprez J,Mora-Camino F,Villaume F.Control of the aircraft-onground lateral motion during low speed roll and manoeuvers[C]∥IEEE Aerospace Conference Proceedings.Washington:IEEE,2004:2656 -2666.
[6] 张明.飞机地面动力学若干关键技术研究[D].南京:南京航空航天大学,2009.ZHANG Ming.Research on some key technologies of aircraft ground dynamics[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2009.(in Chinese)
[7] Goldthorpe S H,Dangaran R D,Dwyer J P,et al.Guidance and control design for high-speed roll out and turn off (ROTO),NASA-CR-201602[R].Washington:NASA,1996:33 -75.
[8] Yu S H,Moskwa J J.A global approach to vehicle control:coordination of four wheel steering and wheel torques[J].Journal of Dynamic Systems,Measurement,and Control,1994,116(4):659 -667.
[9] Allen R W,Rosenthal T J,Szostak H T.Steady state and transient analysis of ground vehicle handling,SAE Paper 870495 [R].Washington:SAE,1987:49 -78.
[10] Allen R W,Szostak H T,Rosenthal T J,et al.Characteristics influencing ground vehicle lateral/ directional dynamic stability,SAE Paper 910234[R].Washington:SAE,1991:56 -89.
[11] Mitschke M,Wallentowitz H.Dynamik der kraftfahrzeuge[M].4th ed.New York:Springer-Verlag Berlin and Heidelberg GmbH& Co.K,2004:5 -135.
[12] 王超.汽车轮胎/路面摩擦系数的估算方法研究[D].长春:吉林大学,2007.WANG Chao.Study on the estimation method of vehicle tire/road friction[D].Changchun:Jilin University,2007.(in Chinese)