应用LabVlEW的聚焦声场测量系统
2014-02-28白景峰
江 湛,白景峰,余 瑛
1 上海交通大学生物医学工程学院生物医学仪器研究所,上海市, 200030
2 上海交通大学Med-X研究院,上海市,200030
应用LabVlEW的聚焦声场测量系统
【作 者】江 湛1,2,白景峰1,2,余 瑛1,2
1 上海交通大学生物医学工程学院生物医学仪器研究所,上海市, 200030
2 上海交通大学Med-X研究院,上海市,200030
该文根据聚焦声场测量的要求,应用LabVIEW虚拟仪器平台建立了一个聚焦声场测量系统。该系统能够自动寻找聚焦声场的焦点位置,并根据焦域的大小调整扫描路径,三维声场扫描时间从均匀步长的888 h减少到变步长的9.25 h,提高了声场测量效率。理论计算与系统测量结果存在一定偏差,其中焦平面-6 dB 宽度差异率为3.691%,声束轴-6 dB长度的差异率为12.937%。
声场测量;系统软件;LabVIEW
0 引言
20世纪90年代以来高强度聚焦超声(High Intensity Focused Ultrasound)逐渐发展为一项极具发展潜力的无创肿瘤治疗手段。高强度聚焦超声利用超声声能在体内转换为热能,通过将超声波波束聚焦于靶组织的,在靶组织内形成一个能量可高达500 W/cm2的区域。声能在靶区内转换为热能,令靶组织在(0.5~5) s的时间内迅速升温至60oC以上,从而使靶组织的细胞迅速发生热变性和坏死[1]。高强度聚焦超声系统的三维声场分布是衡量其治疗探头设计与制造工艺、治疗效果好坏的关键因素,也是衡量设备安全性与效率的重要指标[2],对治疗计划的制定也有着重要的参考意义[3]。因此,对高强度聚焦超声系统的声场测量是研究高强度聚焦超声技术的重要环节。
本文设计研发了一套应用LabVIEW的聚焦声场测量系统。该系统控制水听器按用户指定路径自动化的测量三维声场的分布情况,并可实时重建出二维声场分布图。使用本文研发的声场测量系统对相控聚焦超声声场分布进行了测量,并将测量结果与理论仿真的声场分布进行了对比。
1 聚焦声场测量系统
聚焦超声声场测量参数包括声功率、声压、声强和焦域尺寸等。目前声功率的主要测量方法有辐射力法、量热法和声光衍射法等,声场中各处的声强和声压以及焦域尺寸主要通过水听器法来测量[4]。
水听器可分为压电水听器和光纤水听器。本文使用的是PT材料制成的压电水听器。当压电材料被超声照射时,声压引起压电材料内部电荷分布的变化,这种变化使得压电材料两端出现相应的电势差。通过前置放大器以及后续的信号处理电路,就可使超声的幅值和频率等声学信息以电压信号的形式表现出来。
本文研发的超声声场测量系统通过PC上位机控制外围硬件,控制水听器按用户指定的路径在三维声
场中进行移动,由数字示波器对水听器在每点处的电压波形进行采集,通过USB接口传送给PC机进行信号存储、声压与声强的计算、三维声场分布的重建。
本文研发的聚焦声场测量系统采用水听器法对聚焦超声声场进行测量。使用水听器逐点扫描声场得到聚焦超声声场各点的声压,计算出聚焦超声声场的分布及其大小,并实时显示。
1.1 硬件系统
基于LabVIEW的聚焦声场测量系统的硬件系统构架如图1所示,包括水听器、数字示波器、步进电机、上位机以及测量水槽等部分。

图1 声场测量系统硬件框图Fig.1 Hardware diagram of Sound fi eld measurement system
(1) 水听器 采用中国科学院声学研究所研制的PT探针式水听器。传感器有效直径0.8 mm,末端为BNC插头,可连接到示波器或信号采集卡进行波形采集和记录。水听器经中国科学院声学研究所校准,在1.36 MHz频率下灵敏度为0.11 mv/Pa。最大测量声压为40 MPa。
(2) 数字示波器 采用Agilent MSO-X 2012A数字示波器。该示波器的最大采样率2 GSa/s,带宽100 MHz。该示波器带有USB接口和GPIB接口,本文设计的声场测量系统使用速度更快的USB接口完成示波器与PC机之间的通讯。
(3) 步进电机 使用北京卓立汉光生产的MC400位移台控制箱控制的KSA050-11系列高精度电控位移台。MC400位移台控制箱通过RS-232接口与PC机进行通讯,接受上位机的位移指令,并将当前位置返送给PC机。KSA050-11系列高精度电控位移台的移动范围为50 mm,分辨率为2.5 μm,最大速度40 mm/s。
(4) 测量水槽 测量水槽为横截面为正方形的立方体,横切面边长为450 mm,高为290 mm。高强度聚焦超声换能器位于测量水槽底部中央,向上发射超声波。测量水槽四壁铺设有海绵。为减小反射波对声场测量的影响,在水听器周围放置有吸声橡胶制成的声吸收体。吸声橡胶采用牛凤岐教授主持研制的UA-1 型吸声内衬。声吸收体尺寸为(150×150) mm2的正方形板面,厚度(自底面至条棱尖端)约5 mm。在(0.5~5) MHz频段水中正入射的超声波回声降低达(20~40) dB,吸声系数为99 %~99.5 %。
1.2 软件系统
本文设计的聚焦声场扫描系统软件采用LabVIEW平台进行编写。LabVIEW (Laboratory Virtual Instrument Engineering Workbench) 是一种用图标代替文本行创建应用程序的图形化编程语言[5]。传统文本编程语言根据语句和指令的先后顺序决定程序执行顺序,而LabVIEW则采用数据流编程方式,程序框图中节点之间的数据流向决定了VI及函数的执行顺序。LabVIEW集成了可满足 GPIB、VXI、RS-232和 RS-485 协议的硬件及数据采集卡通讯的全部功能。它还内置了便于应用TCP/IP、ActiveX等软件标准的库函数。因此在LabVIEW环境之下进行软件开发,可以不必开发与Agilent MSO-X 2012A数字示波器以及MC400位移台控制箱进行通讯的通讯接口代码,而把精力集中到实现系统功能上来。
系统实现了数据采集处理、数据存储、自动寻找声场焦点位置,自动三维声场扫描,声场分布重建等功能。
根据声场测量需求,系统进行声场扫描的过程可分为三个步骤。
(1) 系统初始化 系统初始化包括软件初始化和硬件初始化。软件初始化主要包括用户界面初始化和内部变量初始化等;硬件初始化主要包括步进电机的复位,归零,状态监测等。
(2) 焦点定位 焦点定位是根据聚焦声场的特点,通过寻找扫描路径上的最大声压值点的位置来确定焦点位置。系统先在XY平面上用较大步长进行大范围二维扫描,并定位出声压最大值点的位置,再以该点为中心使用较小步长进行较小范围的二维扫描,确定出该平面上声压最大值点的位置。最后以该点为中心,沿Z轴进行扫描。Z轴扫描得到的声强最大值点即为系统寻找到的声场焦点。在寻找声场焦点过程中用到的扫描步长和扫描范围等参数可根据所测量声场的理论仿真结果进行调整。
(3) 声场扫描 系统按照用户设定的扫描路径进行
逐点扫描。将扫描结果实时的保存到上位机的硬盘之中,这样可以保证在出现意外情况导致扫描终止时,已获取的扫描数据不会丢失。
在测量过程中,系统可以全自动化的完成水听器的移动、水听器位置确认、测量数据读取,数据有效性校验、多次重复测量以及数据保存等功能。整个测量过程完全由系统自主进行,无须操作人员干预,具有一定的智能处理能力和较高的自动化水平。
系统软件采用模块化的编程方法,将系统软件所需的主要功能分成初始化模块、步进电机控制模块、数据采集处理模块和扫描路径指令生成模块分别实现。完成各功能模块的设计之后,系统软件根据测量流程调用各功能模块实现所需功能。
(1) 初始化模块
初始化模块的功能是将对程序内的各变量和各外围设备进行初始化。保证超声声场自动扫描测量系统做好进行声场扫描的准备。初始化模块内完成的主要操作有:初始化与示波器及步进电机通讯的端口、设定步进电机的初始位置和设定步进电机的移动速度等。
(2) 步进电机控制模块
步进电机控制模块是由步进电机移动子模块和步进电机位置查询子模块两个独立的子模块组成。步进电机移动子模块负责设定步进电机移动的目标位置。步进电机位置查询子模块负责获取步进电机的当前位置。测量系统通过先后调用步进电机移动子模块和步进电机位置查询子模块实现对于步进电机运动的闭环控制,从而确保水听器在声场中所处位置的准确性。
(3) 数据采集处理模块
数据采集处理模块负责与数字示波器进行通信,将数字示波器测得水听器电压波形数据读取回来,并对其合法性进行检查,并对所有合法数据进行处理,将处理结果保存入平均值数组之中,以待进行进一步的数据处理。
(4) 扫描路径指令生成模块
由于每次测量开始时,超声声场焦点的位置对于测量系统是未知的。因此用户指定的扫描路径无法使用绝对位置来表示,只能使用相对于焦点的位置表示。但对于步进电机来说,其能识别的位移指令必须使用绝对位置。因此需要扫描路径指令生成模块进行转换,生成可直接发送给步进电机的位移指令。
2 声场扫描耗时优化
目前采用水听器逐点扫描法一般为等步长法扫描[6]。该方法的优点在于可以较为方便的制定出扫描路径,系统控制较为简单,但是存在三维扫描耗时太长的问题。一般来说,对一个聚焦声场进行三维扫描(X、Y为±10 mm,Z为±20 mm),所需测量的点数可多达160万个点,若每个扫描点的耗时2 s则总耗时达到888 h即37 d多。因此采用多种方式减小扫描耗时十分重要。
扫描总耗时由每点扫描时间乘以扫描点数决定。因此可从减少扫描点数和减少每点扫描时间两个方面着手优化扫描耗时。通过扫描策略优化的方法减少扫描点数。HIFU声场特性是其在焦域范围内声强较强,在其他范围内声强较弱。因此扫描过程中可以在声强较强、声场变化较为剧烈的区域使用较小的步长,从而保证扫描精度;在声强较弱、声场较为稳定的区域使用较大的步长,从而减小扫描点数优化扫描耗时。而在在步长较大的区域,则通过线性插值的方法对数据进行插补。扫描耗时优化的另一个方法就是单点扫描时间优化。经分析可知,单点扫描时间由步进电机移动时间、数据读取时间以及程序执行时间组成。提高步进电机移动速度可减小步进电机移动时间。但步进电机移动过快会使测量精度降低,因此不可无限提高。数据读取时间主要受与数字示波器通信的GPIB总线带宽限制。采用UBS2.0总线代替GPIB总线可减小数据读取耗时。
对于一个X、Y方向上20 mm×20 mm,Z方向上40 mm的扫描区域,在进行优化前后的扫描耗时情况见表1。

表1 优化前后的耗时情况Tab.1 Scanning time before and after optimization
3 声场仿真与实验结果分析
对于无限大障碍板上的圆形活塞换能器,其空间某点处的声压可用瑞利积分表示为[7]

其中p为声场中任意一点的复声压,j=√-1,ρ和c分别代表媒质密度和声波在媒质中传播的速度,k =2π/λ为波数,A为源表面辐射面积,u为源表面上的法向振速,μ为衰减系数,r和r'分别表示观察
点和源点的矢量坐标,为声波在衰减系数为的媒质中的传播距离。对于由N个阵元组成的换能器,其在空间坐标为(xm, ym, zm)的某点m处的声压可以看成是[8]

其中An和un分布是第n个阵元的面积和法向振速,rmn代表场点m到n阵元上各积分微元dAn中心点的距离,dmn为声波在衰减系数为a的媒质中的传播距离。
声场测量实验所用的相控型聚焦超声换能器是110个阵元组成的球壳超声换能器。其曲率半径为150 mm,阵元直径为10 mm,工作频率为1.36 MHz。
声场测量实验时声场扫描范围为X轴±4 mm,Y轴±4 mm,Z轴±10 mm。扫描步距为XY轴上0.05 mm,Z轴上0.1 mm。测量重复十次,以其平均值作为最后的测量结果,并计算测量数据的标准差。
(1) 在焦平面处过焦点沿X轴±4 mm范围内的一维声场分布实验测量结果与理论仿真结果对比结果如图2所示。图中可见,主瓣处声场实验测量结果与理论仿真计算出的结果符合的十分良好。但实验测量结果声场分布不完全对称。X轴负方向上的旁瓣处声强比正方向上的旁瓣处强。且两旁瓣的位置比理论仿真值更加靠外。实验测得的最大旁瓣处的最大旁瓣级为-24.421 9 dB。实验测量得到的-6 dB点位置-0.769 mm处和 0.776 mm处。焦域范围为1.545 mm。理论仿真计算处的-6 dB点位置-0.745 mm处和 0.745 mm处。焦域范围为1.490 mm。实验测量结果与理论仿真结果的相对偏差为3.691%。

图2 焦平面处X轴声强分布实验测量结果与理论仿真结果对比图Fig.2 Experimental and theoretical sound intensity distributions along X-axis on the focal plane
(2) 在Z轴上焦点为中心±10 mm范围的一维声场如图3所示。从图中可见,Z轴上实验测量结果与理论仿真结果基本一致。但实验测量得到的声强随z轴位置改变的速度较理论仿真慢。在理论仿真时结果中在±8 mm附近存在声强接近于零的极小值点。但在实验测量的相应位置处并为测得极小值点。实验测量得到的-6 dB点位置-5.533 mm处和5.257 mm处。焦域范围为10.790 mm。理论仿真计算处的-6 dB点位置-4.722 mm处和 4.892 mm处。焦域范围为9.554 mm。实验测量结果与理论仿真结果的相对偏差为12.937%。
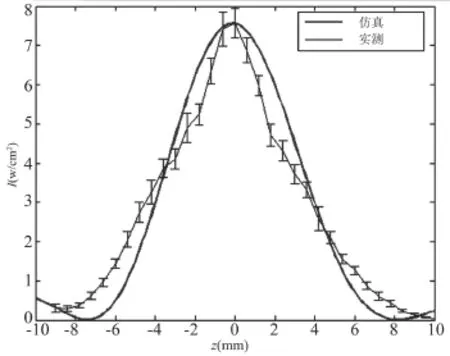
图3 Z 轴声强分布实验测量结果与理论仿真结果对比图Fig.3 Experimental and theoretical sound intensity distributions along z-axis
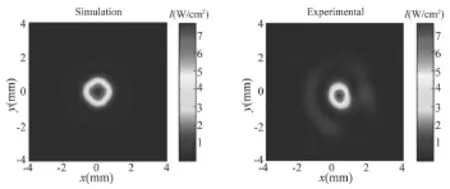
图4 焦平面处声场实验测量结果与理论仿真结果图Fig.4 Experimental and theoretical sound intensity distributions on the focal plane
(3) 焦平面处以焦点为中心±4 mm范围的二维声场分布实验测量结果和理论仿真结果如图4所示。从图中可见,实验测量结果与理论仿真结果十分一致。实验测量结果与理论仿真结果的主要差别在于旁瓣位置。实验测量结果中,旁瓣的范围较理论仿真结果更大,其边缘不清晰。实验测量结果中,旁瓣并未形成完整的圆环状,而是在右下角处出现了一个缺口。
分析实验测量结果与理论仿真结果的偏差可分为实际声场分布与理论仿真结果之间的偏差和基于
LabVIEW的声场测量系统对实际声场进行测量时的测量误差两部分。实际声场分布与理论仿真结果之间的偏差的可能原因有:实际发生超声声场时不同阵元之间的相位误差、不同阵元的激励电压不一致和超声换能器中阵元的安装位置误差等。这部分偏差不在本文讨论的范围之内。基于LabVIEW的声场测量系统的测量误差系统包括使用的水听器的测量误差、系统使用的数字万用表的量化误差、系统使用的步进电机的定位误差和环境中电磁干扰等。经分析,本文认为测量误差主要受水听器的测量误差影响。未来可通过换用更精确的水听器提高基于LabVIEW的声场测量系统的测量精度。

表2 -6 dB范围实验测量结果与理论仿真结果对比表Tab.2 Experimental and theoretical -6 dB location
4 结论
相控型高强度聚焦超声系统的声场分布测量对其临床应用具有一定价值。本文介绍的基于LabVIEW的聚焦声场测量系统可自动化的对空间中超声声场的分布情况进行测量,并重建出直观的超声声场二维分布图,计算出旁瓣级、超声工作频率、焦区几何尺寸等参数。实验测量得到的声场分布结果与理论仿真得到的声场分布结果十分相似,表明基于LabVIEW的聚焦声场测量系统的测量结果准确可靠。
[1] 冯若. 高强度聚焦超声 “切除 ”肿瘤的机理[J]. 中国超声医学杂志, 2000, 16(12):881-884.
[2] Bailey MR, Khokhlova MR, Sapozhnikov OA, et al. Physical mechanisms of the therapeutic effect of ultrasound(a review)[J]. Acoust Phys, 2003,49(4):369-388.
[3] Canney MS, Bailey MR, Crum LA, et al. Acoustic characterization of high intensity focused ultrasound fields: A combined measurement and modeling approach[J]. J Acoust Soc Am, 2008, 124:2406-2420.
[4] ter Haar G, Coussios C. High intensity focused ultrasound: Physical principles and devices[J]. Int J Hypertherm, 2007, 23: 89-104.
[5] National Instumentation. LabVIEW foundation[R]. [2007]. http:// www.ni.com.
[6] Shaw A, Hodnett M. Calibration and measurement issues fortherapeutic ultrasound[J]. Ultrasonics, 2008, 48(4): 234-252.
[7] Daum DR, Hynynen K. A 256-Element Ultrasonic Phased Array System for the Treatment of Large Volumes of Deep Seated Tissue[J]. IEEE Trans Ultrason Freq Contr. 1999, 46(5): 1254-1268.
[8] Zhang C, Chen Y. Investigation of a spherical-section ultrasound phased array for hepatic ablation[J]. J Zhejiang Univ SCI, 2007, 8(8): 1237-1245.
A Focused Sound Field Measurement System by LabVlEW
【 Writers 】Jiang Zhan1,2, Bai Jingfeng1,2, Yu Ying1,2
1 Biomedical Instrument Institute, School of Biomedical Engineering, Shanghai Jiao Tong University, Shanghai, 200030
2 Med-X Research Institute, Shanghai Jiao Tong University, Shanghai, 200030
【 Abstract 】In this paper, according to the requirement of the focused sound field measurement, a focused sound field measurement system was established based on the LabVIEW virtual instrument platform. The system can automatically search the focus position of the sound fi eld, and adjust the scanning path according to the size of the focal region. Three-dimensional sound fi eld scanning time reduced from 888 hours in uniform step to 9.25 hours in variable step. The efficiency of the focused sound field measurement was improved. There is a certain deviation between measurement results and theoretical calculation results. Focal plane - 6 dB width difference rate was 3.691%, the beam axis - 6 dB length differences rate was 12.937%.
sound fi eld measurement, system software, LabVIEW
TP274.4
A
10.3969/j.issn.1671-7104.2014.03.006
2014-01-06
上海市科技攻关项目(11441900200)
白景峰,E-mail: jfbai@sjtu.edu.cn
1671-7104(2014)03-0181-05
