河流水面成像测速方法的比测试验研究
2014-02-10徐立中樊棠怀王吉星
张 振,徐立中,樊棠怀,王吉星
(1.河海大学计算机与信息学院,江苏 南京 211100;
2.南昌工程学院信息工程学院,江西 南昌 330099;
3.水利部南京水利水文自动化研究所,江苏 南京 210012)
河流水面成像测速方法的比测试验研究
张 振1,徐立中1,樊棠怀2,王吉星3
(1.河海大学计算机与信息学院,江苏 南京 211100;
2.南昌工程学院信息工程学院,江西 南昌 330099;
3.水利部南京水利水文自动化研究所,江苏 南京 210012)
大尺度粒子图像测速(LSPIV)是一种新兴的非接触式瞬时全场流速测量技术。以 LSPIV 为基本原理,针对现场条件下特有的水流示踪物、复杂的光学成像环境及受限的测点布设方式,通过对流场图像采集、水面背景抑制、运动矢量估计、时均流场重建、水面流场定标及断面流量估计等技术方法的集成创新,建立一套完整的河流水面成像测速(RSIV)工作模式。为评价 RSIV 的性能并提出研究需求,在现场开展与流速仪法和雷达法的比测试验。结果表明,RSIV 法的时均流速测量精度可以达到 0.5 mm/s 以内,相比流速仪法具有更高的时空分辨率。当流速系数和断面划分方式选择合适时,流量估计值和雷达法的一致性较好。试验初步验证河流水面成像测速方法用于河流流速、流量测量的可行性。
水文测验;RSIV;流速仪法;雷达法;比测试验
0 引言
随着传感器及嵌入式技术的快速发展,实时的明渠水流监测技术取得了长足进步,特别是基于声学、光学、电波及图像的非接触式测流仪器,显著提高了水文测验及水利量测的效率及安全性[1]。大尺度粒子图像测速(LSPIV)是一种新兴的非接触式瞬时全场流速测量技术,是实验室流体力学研究中的粒子图像测速(PIV)技术针对天然河流等大尺度水体应用的扩展[2]。它以植物碎片、泡沫、细小波纹等天然漂浮物及水面模式为水流示踪物[3],以自然光为主要光源,以数码相机或视频摄像机为图像采集设备,通过匹配跟随表面水流运动的示踪物图像获得流速场[4]。
自 LSPIV 方法提出以来,以日本神户大学和美国爱荷华大学为代表的国外各研究团队不断对其进行改进,并通过现场比测初步验证了此方法在河流流速、流量监测方面的可行性[5-8]。而在国内,尽管在 21 世纪初就有相关文献引入图像法测流的概念[9],但并未给出具体的实施方案。目前研究多集中于实验室环境下的水槽及模型实验[10],而现场环境下系统化的流速、流量比测试验研究尚未见报道。原因主要在于不同测量方法在实验设置和数据同化上的难点,涉及到断面选取、时间同步、空间平均和深度平均等关键步骤,需要精心地筹划和部署。
近年来,河海大学课题组以 LSPIV 为基本原理,针对现场条件下特有的水流示踪物、测点布设方式和测流工作流程,通过对水面目标增强、水面背景抑制、运动矢量估计、时均流场重建、水面流场定标及断面流量估计等技术方法的集成创新,建立了一套较为完整的河流水面成像测速(RSIV)工作模式及评价体系。为了评价 RSIV 的性能并提出研究需求, 2013 年 10 月 15 日在江西省遂川县的坳下坪(二)水文站采用 RSIV 与转子式流速仪和雷达测流系统进行了流速、流量比测试验。
1 比测试验测流环境
1.1 测站特性
坳下坪(二)水文站是长江流域赣江水系遂川江二级支流禾源水的小河水文站。流域的干流长度为14.5 km,平均比降为 248×10-4,平均宽度为 5.96 km,集水面积 86.4 km2,水文站距河口18.5 km。水文站的水位、降水量观测采用自记记录,流量采用手摇缆道施测,水文资料计算机整编。水文站实测最高水位为 72.18 m,相应流量为 221 m3/s;实测最大流速为 4.94 m/s;实测最大水深为 3.12 m;实测年最大降水量为 2 112.8 mm。
1.2 测验河段
测验河段的地形图及现场测流环境和仪器布设情况如图1 所示。测验河段顺直,长约 400 m。河床由卵石、粗沙、细沙组成,冲淤频繁。两岸为农田,地势较平坦,当水位在 72.50 m 时,左岸开始漫滩,右岸出现死水。水流折冲形成的表面波及漩滚模式为雷达和 RSIV 方法测流提供了良好的示踪条件。断面上游约 136 m 处为禾源村乱石桥,桥下有一岩石急滩;下游约 238 m 处为禾源中心桥,对高水流量有一定控制作用;下游 500 m 左岸有黄背水汇入,对水位—流量关系没有影响。
1.3 测点布设
基本水尺兼流速仪和浮标测流的断面位于乱石桥下游约 136 m 处,浮标兼比降上断面位于基本断面上游 40 m 处,水文缆道位于基本水尺断面上,浮标兼比降下断面位于基本断面下游 40 m 处。2013 年8 月,测站安装了国外引进的 SOMMER RQ-30 型非接触式雷达测流系统用于流量在线监测。仪器位于流速仪断面上游约 1 m 处,采用悬臂方式安装于河流右岸附近的水面上方,由太阳能电池板和蓄电池供电,输出信号通过 RS-485 总线连接至站房内的机顶盒,并转换为视频信号在监视器上显示。
RSIV 测点设置于河流左岸,保证相机视场完全覆盖河流断面及地面控制点。相机采用 1 台架设于三脚架上的可见光数码相机,距水面高约 5 m,光轴近似垂直于顺流方向;镜头前加装 1 片旋转式线偏振片用于实现偏振光学滤波。地面控制点(GCP)采用黑白 2 色的方形对角标志,通过插地牌均匀、对称地分层布设于河流两岸,如图2 所示。选取10 组用于流场定标,其中 GCP1,GCP5,GCP6 和GCP10 布设于水面边界处,插地牌和水面的交点作为水面控制点(WCP),用于求解水面高程系数;GCP3 和 GCP8 布设于流速仪断面上,前者的起点距为 0.8 m;其余 GCP 布设于漫滩区域。采用 1 台免棱镜全站仪(NTS-362RM)测量 GCP 和 WCP 的世界坐标,如表1 所示。

图2 控制点分布图

表1 GCP 和 WCP 的世界坐标和图像坐标
2 比测试验开展
比测试验于上午 9 时 45 分至 11 时 45 分进行。比测期间水流稳定、天气晴朗、水面无风,基本水尺水位保持在 69.332 m 左右。水下地形数据借用2013 年 8 月 12 日的大断面测量值,图3 给出了试验期间的断面水下地形图。为避免涉水测量对 RSIV 法的影响,于 9 时 45 分至 10 时 30 分首先进行河流水面图像的采集;然后于 11 时 0 分 至 11 时 45 分进行流速仪法的涉水测量;期间雷达测流系统始终处于连续工作状态。

图3 试验期间的断面水下地形
2.1 RSIV 法
2.1.1 流场图像采集
河流水面由于受到大气散射光、水面反射光及水下出射光的干扰,成像光学环境相比单一的气、水介质要复杂得多[11]。针对这种复杂环境下的泡漩、表面波等水流示踪物检测问题,可利用水体及示踪物的偏振特性差异,采用偏振光学滤波的方式增强水面目标。由于水面反射光主要表现为振动方向垂直于入射面的垂直偏振光,而水下出射光主要表现为振动方向平行于入射面的水平偏振光,当偏振角为 0° 时,可以有效抑制水面反射噪声,适用于深水、高流速的情况;当偏振角为 90° 时,可有效抑制水下出射噪声,适用于浅水、低流速的情况。由于试验期间为枯水期,平均水深仅为 0.2 m 左右,考虑到石块等水下场景将影响水面成像的可靠性,可将偏振角调节至 90°,以增强水面的镜面反射,提高目标和背景间的对比度。完成成像参数设置后,相机以 30 fps 的帧速率连续拍摄分辨率为 1 920× 1 080 pixel 的视频图像并存储于 SD 卡中。采集完成后采用 1 台笔记本电脑读取视频,并重新采样为3 fps 的图像序列。帧速率的选取应足够高,以减小图像量化误差对位移估计精度的影响;同时应足够低,以保证水面模式在帧间保持运动的连续性,这里采用经验值预采样和人工观测调整的方式选取。
2.1.2 测速网格划分
测速网格划分和后续的水面流场定标同属于河流水面的视觉测量问题。为保证测点密度不受图像透视畸变的影响,便于和流速仪法比测,本次试验采用了世界坐标系下的均匀网格,测速网格以 GCP3和 GCP8 的连线为断面方向划分为 3 个流速断面,每个断面设置 17 个间距为 1 m 的测点,具体划分如表2 所示。根据坐标映射关系求得测点的图像坐标,并以此为中心建立窗口尺度不小于待测位移大小 3 倍的分析区域。

表2 河流水面测速网格的划分
2.1.3 水面背景抑制
从图像序列中依次读取 2 帧连续图像作为 1 组图像对,对应 1 幅瞬时流场。针对水流示踪物易受倒影、耀光等复杂背景噪声的干扰,而引起较大的位移估计误差的问题,对分析区域图像采用一种基于视觉感受野额度的双高斯差(DOG)模型的自适应背景抑制方法,以提高相关曲面的信噪比[12]。图像滤波过程描述如下:

式中: I (x, y) 和 g (x, y) 分别表示滤波前、后的图像;模型参数 A1和 A2分别表示兴奋性和抑制性分布的敏感度;σ1和 σ2分别表示 2 种分布的空间散布程度。自适应背景抑制方法利用水面图像中目标和噪声灰度分布的先验知识,以及兴奋性与抑制性作用相抵的约束关系选取模型参数,以达到局部最优的增强效果。
2.1.4 运动矢量估计
针对泡漩、表面波等表现为非刚体目标的天然水面模式,对图像对中的每组分析区域采用 1 种基于快速哈特利变换互相关(FHT-CC)的自适应方法,估计天然水面模式在连续图像中的以像素/帧为单位的运动矢量[13]。此方法以 FHT-CC 作为相关测度用于提高计算效率:通过 3 点高斯曲线拟合出相关峰值的亚像素坐标,使位移估计精度达到 0.2 pixel;采用由粗到精的策略迭代搜索最接近于 3 倍待测位移的相关曲面信噪比峰值,进而自适应地得到最佳窗口尺度,用于改善流场测量的空间分辨率。1 组图像对获得的瞬时位移矢量场如图4 所示。

图4 1 组图像对获得的瞬时位移矢量场
2.1.5 时均流场重建
受示踪物时空分布不均和水面光学噪声的影响,图4 中瞬时流场的矢量正确率仅为 30% 左右。为得到稳定可靠的水面流场,采用一种基于序贯矢量平均的方法重建时均流场[14]。此方法利用断面流速方向一致性分布的特点,采用全局角度直方图检测流动主方向,用于解决区域性错误矢量的识别问题。此外,利用示踪物时空分布的冗余信息,以时均流场的矢量正确率为依据控制求平均的进程,用瞬时流场重建的时均流场如图5 所示,瞬时流场及时均流场的矢量正确率对比曲线如图6 所示。从图6可以看出,仅用 15 幅瞬时流场就重建出了矢量正确率为 74% 的时均流场,有效提高了流场测量的时间分辨率。
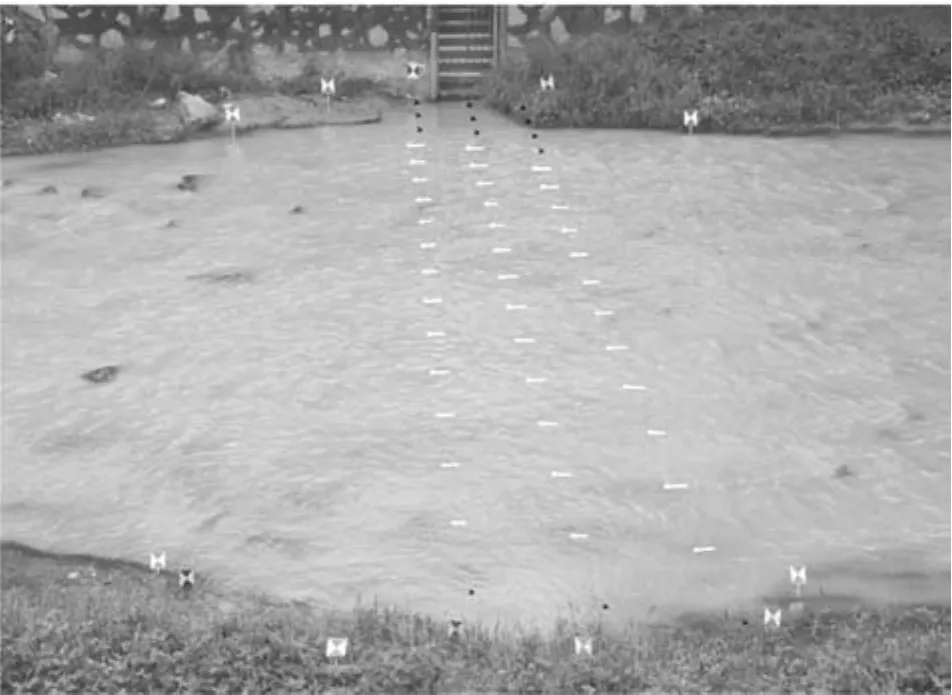
图5 瞬时流场重建的时均流场
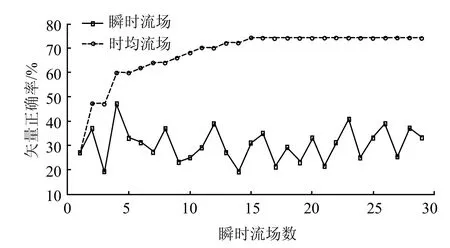
图6 瞬时流场及时均流场的矢量正确率
2.1.6 水面流场定标
针对河流水面控制点布设困难,光学系统存在像差,水面高程动态变化及相机拍摄视角倾斜的问题,采用一种基于变高单应的单目视觉平面测量方法实现水面流场定标[15]。此方法将河流水面的世界坐标 ( X, Y ) 和图像坐标 (x, y) 间的映射描述为以下变高单应关系:

式中:D1,D2分别表示河段在 X 和 Y 方向的比降系数;D3表示断面的水位系数;ι1~ ι11表示 11 个直接线性变换(DLT)系数;δx,δy表示畸变像差,这里仅引入三阶径向畸变系数 k1,薄棱镜畸变系数s1和 s2。
定标过程步骤如下:
1)利用 4 个 WCP 的世界坐标采用最小二乘法求解出 3 个水面高程系数,D1= - 0.000 821,D2= - 0.001 241,D3= - 3.302 488。
2)采用人工定位的方式,手动提取表1 中 GCP的亚像素图像坐标,并采用 DLT 法线性求解出 11 个DLT 系数。
3)将 DLT 系数作为初值,采用非线性迭代的方法求解优化的 DLT 和像差系数,迭代过程如表3所示。当 GCP 坐标的标定精度达到预设值的 99.8%后停止迭代,此时空间坐标的平均测量误差在 5 mm以内。
4)以测速网格的图像坐标为起点叠加位移量求出运动矢量的终点坐标,并根据变高单应关系将其转换到世界坐标系。
5)将矢量起点和终点的世界坐标做差,并除以图像对的时间间隔就得到真实流速的大小,流场定标结果如表4 所示。对于 10 s 图像序列重建得到的时均流场,如果空间坐标的平均测量误差为 5 mm,则时均流速的测量精度可以达到 0.5 mm/s 以内。
2.1.7 断面流量估计
测得水面时均流场后结合断面水深采用标准的流速—面积法估计断面流量,具体步骤如下:
1)选取位于流速仪断面上的流速断面 1 测量值作为 RSIV 方法的比测断面,并根据断面上 GCP3 的坐标计算得到各节点对应垂线的起点距。这里对10 min 内完成的 60 次时均水面流速测量值进行统计,得到断面流速分布及各测点的流速脉动区间,分布统计值如图7 所示。
2)对垂线 1,2,16,17,18 的流速均值进行线性空间插值,得到完整断面的水面流速分布,并选取 0.80 作为流速系数,将水面流速转换为深度平均流速,如表5 所示。

表3 DLT 系数和像差系数的求解过程
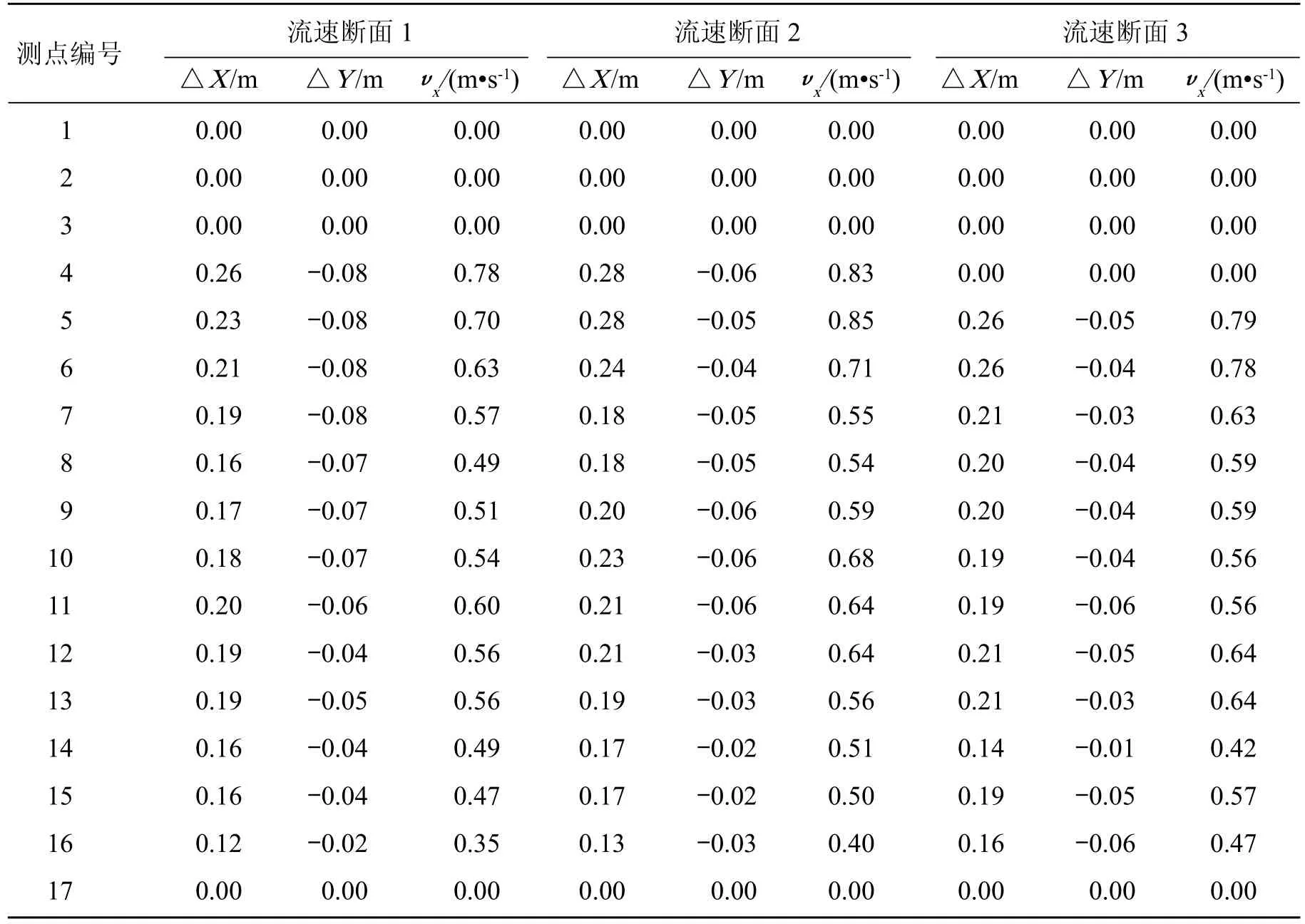
表4 流场定标后的位移矢量及剖面流速
3)以测速垂线为界将断面划分为 19 个子断面,如图8 所示。
4)将垂线间距和平均水深的乘积作为子断面的过水面积,并将垂线深度平均流速的算术平均作为子断面的平均流速,二者相乘即为子断面流量,计算如表6 所示。
5)累加子断面的面积和流量,得到断面的总过水面积为 4.069 m3,总流量为 1.729 m3,平均流速为0.425 m/s。

图7 60 次测量的断面流速分布统计值
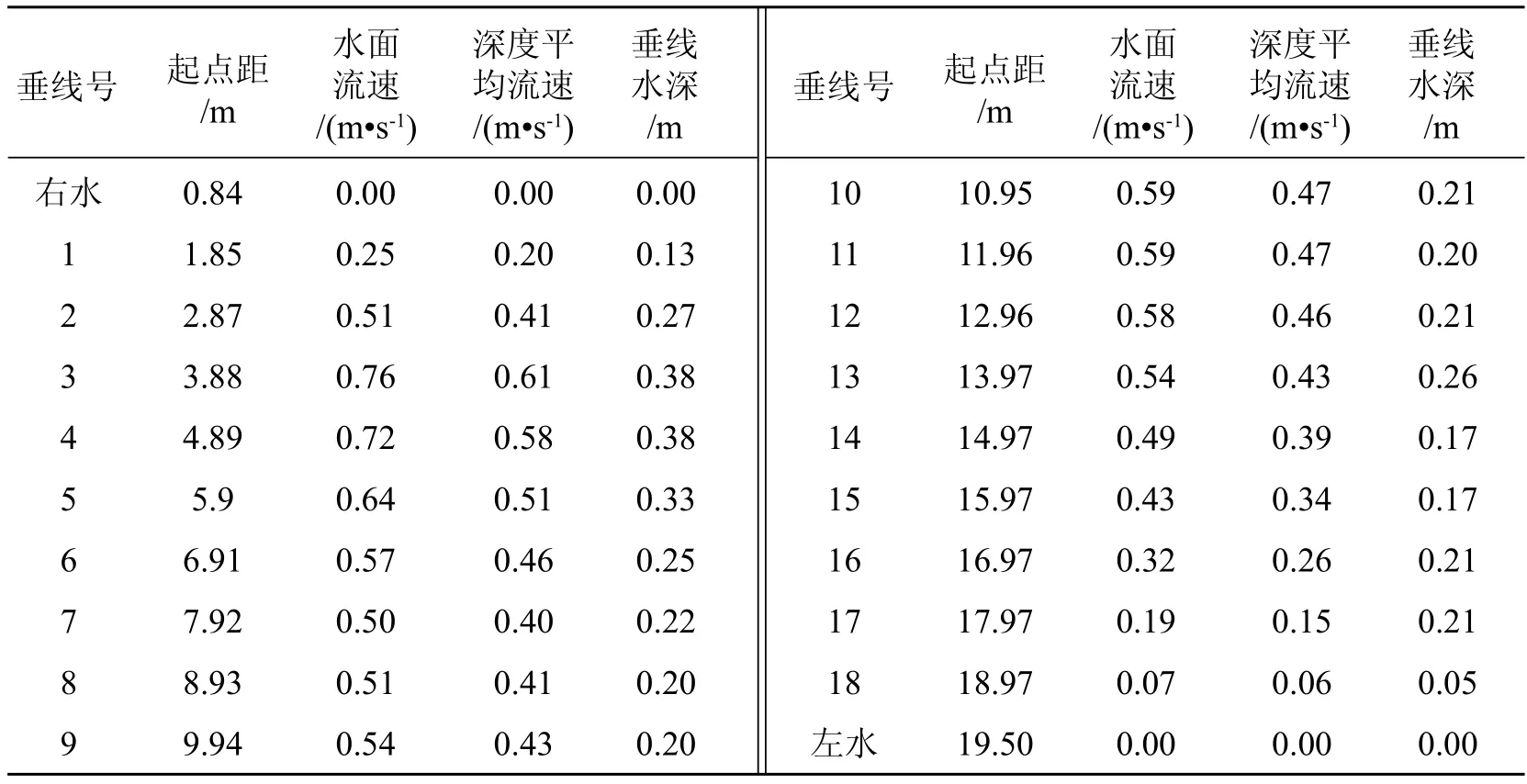
表5 空间插值后得到的断面流速分布
2.2 流速仪法
流速仪共测量了断面上 10 条垂线的水面一点流速(相对水深 0.0)及前 8 条深水垂线的水下一点流速(相对水深 0.6),对垂线 9,10 的水下流速进行线性插值后将其作为深度平均流速,如表7 所示。断面流量估计同样采用流速—面积法,子断面划分及流量计算分别如图9 和表8 所示,得到断面的总过水面积为 3.477 m3,总流量为 1.203 m3/s,平均流速为 0.346 m/s。

图8 RSIV 法断面流量估计中子断面的划分

表6 RSIV 法的断面流量计算表

表7 流速仪法的流速测量值
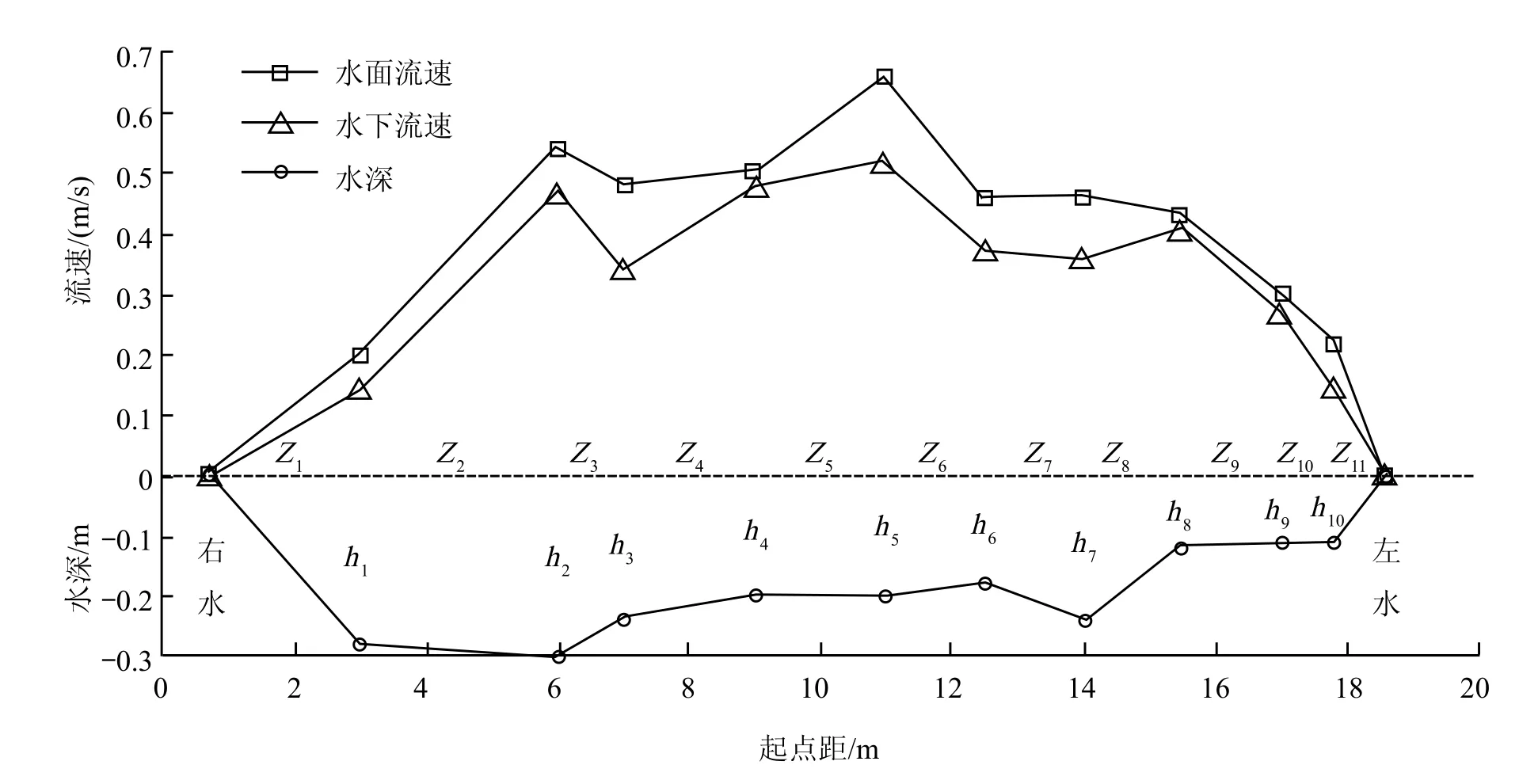
图9 流速仪法断面流量估计中子断面的划分

表8 流速仪法的断面流量计算表
2.3 雷达法
测站配备的 RQ-30 型雷达测流系统集成了 1 台脉冲式水位雷达和 1 台多普勒测速雷达,测量范围分别为 0~15 m 和 0.15~15 m/s,分辨率为 1 mm 和1 mm/s。通过内置的水力学模型,根据预先输入的水下地形及河床糙率等断面参数计算流量。比测期间,系统以 2 min 为采样间隔进行连续测量,测得的断面平均流速和流量分别为 0.430 m/s 和 1.420 m3/s。
3 比测试验成果分析
对比图8 和 9 的流速分布曲线可以看出:尽管两者具有相近的变化趋势,但由于 RSIV 法具有更高的时空分辨率,其多次测量得到的流速均值(除水面边界附近的测点外)构成了较为平滑的曲线,在空间上反映了流体运动的连续性;在时间上反映了流速的脉动现象,表现为在边壁效应的影响下,流速脉动从中泓区域向两岸递增,变幅在 10% 以上(参见图7)。而流速仪法由于在短时内无法获得密集的测量值,各测点实际上对应于不同的测量时段,降低了测量值的代表性。
为进行单点流速比测,首先将 RSIV 流速插值到流速仪测点实现数据同化,如表9 所示。中泓区域的最大流速均位于起点距为 11.0 m 的垂线 5 处,并且在垂线 2 附近均存在另一个流速峰值。不同的是,流速仪法由于缺少 4 m 附近的测量值,未能准确定位到这个峰值点;而 RSIV 法测得了这个比中泓流速还要大的局部流速峰值。观察 4 m 附近的水下地形正对应于断面的最大水深区域,水流受河床糙率的影响较小,因此在此处测得水面流速峰值是合理的。此外,由于流速仪法测量水面一点流速时,转子的实际入水深度至少应在 0.05 m 以上才能保证测量值稳定,并不是真正的水面流速,因此 RSIV 法的测量值总体偏大。偏小的测量值可能是由于分析区域内的空间平均效应引起的。
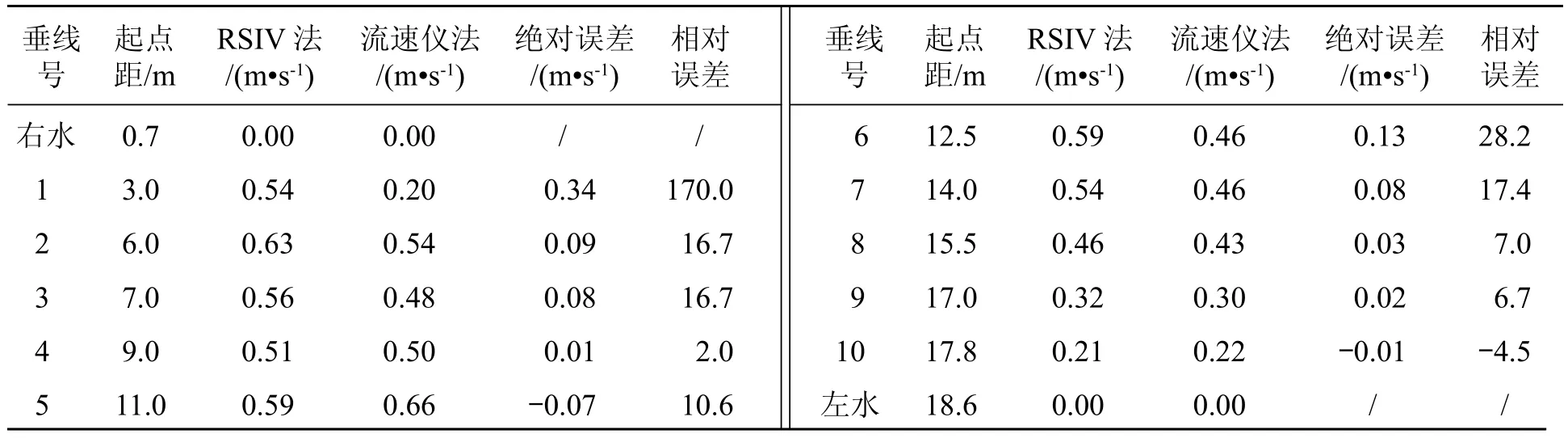
表9 水面流速比测表
表10 对比了流速系数为 0.80 时,RSIV 法和流速仪法的深度平均流速,两者相对误差依然在 5%以上。从表7 的实测数据可以看出,流速仪法对应的流速系数在 0.64~0.96 间变化,原因可能来自两方面:一方面是由于采用涉水测量时测点的深度难以精确控制,另一方面是卵石河床对水流的折冲作用导致水流紊动特性复杂。取均值 0.80 作为天然水面模式流速系数的经验值是一种简单的逼近,相比 0.85 的浮标系数取值更小,因为浮标往往具有一定入水深度,跟随性较差。根据过水面积和断面流量,RSIV 法和流速仪法得到的断面平均流速与雷达法的绝对误差分别为 0.005,0.084 m/s,对应的相对误差分别为 1.16% 和 19.53%,说明 RSIV 法与雷达法测量结果的一致性较好。
对比表6 和 8 的流量计算结果,由于采用了不同的子断面划分方式和水面边界,RSIV 法得到的总过水面积比流速仪法测得的总过水面积高出近 0.6 m3,总流量高出 0.526 m3/s。从表11 可以看出,对数据同化后的 RSIV 流速重新计算断面流量为 1.433 m3/s,和流速仪法及雷达法相比,相对误差分别降低至19.1% 和 0.92%。由此推断,起点距 4.0 m 附近局部流速峰值的差异及边界流速的插值,是影响本次流量比测结果的重要因素,而满足“多线少点”原则的 RSIV 法应当具有更高的流量估计精度。

表10 深度平均流速比测表

表11 RSIV 法(数据同化后)的断面流量计算表
4 结语
通过对河流水面成像测速方法开展现场比测试验研究,获取了测试关键技术方法的现场实测数据,并初步验证了这种新型工作模式用于河流流速、流量测量的可行性。通过比测发现:尽管流速仪法是标准的河流流量测验方法,但在实际操作中由于定点、定线和偏角等误差,在测验环境恶劣、水流条件复杂的现场环境下,要及时、准确地获取完整的断面流速和流量数据并非易事,使得开展单点流速及重复精度的直接比测十分困难,这也是目前 LSPIV 的敏感性研究主要限于实验室环境下进行的主要原因。因此,如何开展多种水流条件下完整河流断面的多点流速和流量比测,研究流速测量的误差源和流量估计的不确定度是有待解决的问题。此外,流速系数是 RSIV 法的主要敏感因素,选取不当可能引起较大的倍乘误差。若能够建立合理的断面流量估计模型,根据断面参数对不同垂线采用不同的流速系数将有助于提高流量估计精度。
未来的工作将以基于数字网络摄像机的水利视频监控系统为平台,实现在线的河流流速、流量监测,进而针对不同的测验河段、水流条件,以及光照和气候条件(如夜间、降雨)开展完整水文过程(如洪峰)的应急监测及测站长期运行性能的评估,以便全面深入地分析 RSIV 法的准确性、稳定性和适宜性,建立一套完整的测验成果精度分析及评定体系。
参考文献:
[1] 徐立中,张振,严锡君,等.非接触式明渠水流监测技术的发展现状[J].水利信息化,2013 (3): 37-44.
[2] MUSTE M, FUJITA I, HAUET A.Large-scale particle image velocimetry for measurements in riverine environments [J].Water Resources Research, 2008, 44(W00D19): 1-14.
[3] 张振,徐立中,王慧斌.河流水面成像测速中的水流示踪物综述[J].水利水电科技进展,2014, 34 (3): 81-88.
[4] 张振,严锡君,樊棠怀,等.近红外成像的便携式大尺度粒子图像测速仪[J].仪器仪表学报,2012, 33 (12): 2840-2850.
[5] A.Hauet, J.D.Creutin, P.Belleudy.Sensitivity study of large-scale particle image velocimetry measurement of river discharge using numerical simulation[J].Journal of Hydrology, 2008, 349: 178-190.
[6] J.Le Coz, A.Hauet, G.Pierrefeu, G.Dramais, B.Camenen.Performance of image-based velocimetry (LSPIV) applied to flash-flood discharge measurements in Mediterranean rivers[J].Journal of Hydrology, 2010, 394 (1): 42-52.
[7] R.Tsubaki, I.Fujita, S.Tsutsumi.Measurement of the flood discharge of a small-sized river using an existing digital video recording system[J].Journal of Hydro-environment Research, 2011, 5 (4): 313-321.
[8] M.Muste, H.C.Ho, D.Kim.Considerations on direct stream flow measurements using video imagery: Outlook and research needs[J].Journal of Hydro-environment Research, 2011, 5 (4): 289-300.
[9] 刘建军,何志江,李白羽,等.图像法水面流速测验方法简介[J].水文,2003, 23 (6): 53-54.
[10] 江杰,李刚.PTV 技术在河流流速测量中的实验研究[J].水文,2011, 31 (6): 44-47.
[11] ZHANG Zhen, WANG Xin, FAN Tanghuai, et al.River surface target enhancement and background suppression for unseeded LSPIV [J].Flow Measurement and Instrumentation, 2013, 30: 99-111.
[12] 张振,陈哲,吕莉,等.基于视觉感受野的自适应背景抑制方法[J].仪器仪表学报,2014, 35 (1): 191-199.
[13] 严锡君,张振,陈哲,等.基于 FHT-CC 的流场图像自适应运动矢量估计方法[J].仪器仪表学报,2014, 35 (1): 50-58.
[14] 张振,郑胜男,韩磊,等.河流水面成像测速中的时均流场重建方法研究[C]//第十五届全国水利量测技术综合学术研讨会.哈尔滨:黄河水利出版社, 2014: 113-123.
[15] 张振,徐枫,沈洁,等.基于变高单应的单目视觉平面测量方法[J].仪器仪表学报,2014, 35 (8): 1860-1868.
Comparative Experiment Study on River Surface Imaging Velocimetry Method
ZHANG Zhen1, XU Lizhong1, FAN Tanghuai2, WANG Jixin3
(1.College of Computer and Information Engineering, Hohai University, Nanjing 211100, China;
2.School of Information Engineering, Nanchang Institute of Technology, Nanchang 330099, China;
3.Nanjing Automation Institute of Water Conservancy and Hydrology, the Ministry of Water Resources, Nanjing 210012, China)
Large Scale Image Velocimetry (LSPIV) is an emerging non-contact technique for measuring whole-field velocities instantaneously.Aiming at the specific flow tracers, complex optical environment and limited site deployment under field conditions, a complete operating mode of River Surface Imaging Velocimetry (RSIV) is built based on the fundamental principles of LSPIV and the integrated innovation of image acquisition, background suppression, motion vector estimation, time-average flow field reconstruction, flow field calibration and discharge estimation.To evaluate RSIV and propose research needs, comparative field experiments are conducted with current meter method and radar method.Results show that the accuracy of RSIV can achieve 0.5mm/s for time-averaged velocity measurement, the spatial-temporal resolution of which is higher than that of the current meter method.The estimated discharge is consistent with the measurement of radar method when choose the proper velocity coefficient and cross-section division.The experiment preliminary verified the feasibility of RSIV for river velocity and discharge measurement.
hydrologic survey; RSIV; current meter method; radar method; comparative experiment
P332
A
1674-9405(2014)05-0031-11
2014-07-30
国家自然科学基金项目(61263029),河海大学中央高校基本科研业务费专项(2014B00714)。
张 振(1985-),男,江苏武进人,博士,主要研究方向为水信息获取与处理、大尺度粒子图像测速。