空间飞行目标动态RCS仿真
2014-02-09董纯柱张向阳
宁 超,董纯柱,黄 璟,张向阳
(电磁散射重点实验室,北京100854)
0 引 言
空间目标的动态RCS仿真可以为目标特性分析与识别等提供数据基础。由于飞行试验成本巨大,不可能通过大量实验开展空间目标雷达特性研究,所以通过仿真计算模拟雷达回波数据,用于训练、检验雷达的探测、跟踪和识别能力已成为一项必不可少的工作[1,2]。仿真分为两个步骤,一是运动建模仿真,二是电磁散射特性仿真。运动建模主要包括目标平动和微动的描述,目标的弹道方程由关机点位置和关机点速度的唯一确定,仿真时设定上述参数直接计算[3],该方法运算简单,但无法事先预知弹道落点位置,影响仿真演示效果。文献[4]构造了从发射点到落点的轨迹参数迭代法,求解了6个轨道根数,计算量较大,仿真RCS时不需要对所有参数计算,可简化部分运算。对于电磁散射特性仿真,文献[5]采用了常用的查表法,事先建立目标的全方位静态RCS数据表,仿真时先计算出目标的姿态角,再从静态RCS抽取对应的值并进行插值和相位修正。该方法的优点是RCS数据表提前产生可提高后续仿真的速度,缺点是数据表难以覆盖所有姿态角,并且不可避免地会引入RCS幅度和相位的插值误差。
针对上述问题,本文采用基于发射点和落点参数,反推关机速度的方法,提高了仿真的演示效果,对4个方程式求解即可得到轨道参数,提高了仿真效率。采用了实时电磁理论建模方法,能准确计算RCS复数解。仿真的主要步骤如下:①计算椭圆弹道,得到各个时刻的目标的坐标;②解算雷达观测目标的姿态和相对距离;③在平动上叠加目标的进动参数;④使用物理光学(PO)和等效电磁流(MEC)[6]实时计算目标的RCS。
1 飞行弹道仿真
如果将地球看成均匀球体,将目标看作质点,则目标的运动就是所谓的“二体问题”。若不考虑大气及地球自转等的影响,地心极坐标下的中段弹道符合椭圆方程[7]

式中:rt——任意时刻t时,目标坐标与地心的距离,ft——该时刻极角,e——偏心率,P——半通径。地心为椭圆的一个焦点。
1.1 最小能量弹道椭圆参数求解
弹道椭圆方程中,P与e共同的形状,其值由关机点的3个参数唯一确定,即关机速度Vt、地心距rk和弹道倾角θk。由相关的力学知识得
式中:ν——中间变量
式中:gk——关机点处重力加速度,Re——地球半径,为6371km。
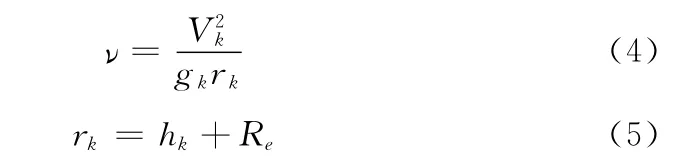
当给定rk和Vk时,可以找到一个θk使射程最大。记为θkopt,此时得到的弹道称为最小能量弹道。弹道如图1所示。
图1 弹道
设关机点A对应的极角为fk,由式(2)-式(4)可得Vk、fk、θk的关系式

根据最小能量弹道的定义,Vk和θk应满足

由式(6)和式(7)得

进而由式(2)-式(4)和式(8)进一步推导得

由式(9)-式(12),通过关机点极角fk和关机点高度hk,可确定P、e等参数,进而得到该最小能量弹道方程的数学表达。
fk利用弹道起点和落点的设定参数求解。仿真时,有3个参数需要设定,分别为关机点A的经纬度坐标、落点B0的经纬度坐标(B0点在地表)以及关机点A的高度hk,本文不考虑再入段空气对弹道的影响,所以关机点A到落点B0点整个弧段都假设符合椭圆方程,如图1所示。图1(b)中B为关机点A关于椭圆长轴的对称点,则有

其中,0为关机点A与落点B0对应的地心矢量的夹角为已知量,α为B与B0的地心矢量夹角为未知量。式(13)中共有4个未知量,将式(11)代入式(13),则可通过数值方法完成未知量的求解,确定方程。确定弹道方程后,还要根据计算弹道上诸点的时间刻度。
1.2 飞行弹道时间刻度的求解
由开普勒第三定律

式中:T——目标的运动周期,a——椭圆轨道的长轴,μ——普朗克常量。又根据开普勒方程

式中:tp——目标飞经近地点(即图1(b)中Z点)的时刻,t——飞行弹道上任一时刻,E——偏近点角,M——平近点角。
由弹道学知识,任意时刻t的偏近点角Et与地心距rt、飞行速度Vt的关系为
通过式(18)、式(19)可求出目标飞行过程中相对于近点时刻tp的时间坐标

至此,得到了各个时刻的弹道参数,完成了弹道仿真。
2 目标的姿态解算及目标进动模拟
目标的RCS随观测的姿态角变化而变化。本文设定圆锥体作为所观测目标。圆锥是一个旋转对称体,由电磁散射理论易知,在空间上其RCS仅是雷达视线角的一维函数[8],这里雷达视线角定义为雷达波束指向与锥体对称轴之间的夹角。
2.1 雷达视线角求解
要求解雷达视线角,首先计算雷达与目标的相对位置关系即雷达指向矢量。上一节求得的弹道方程只是在弹道飞行平面内的二维方程,为求解雷达指向矢量可通过三次坐标旋转实现。
其中

其中,和θ分别为弹道平面的法线矢量在地心坐标系下的方位角和俯仰角。而该法线可通过关机点地心矢量和落地矢量的叉积计算得到。为在弹道平面内OW的投影轴与弹道椭圆长轴的夹角。如图2所示。

图2 坐标系关系

则雷达与目标的距离为

接下来计算目标的对称轴矢量。需要先引入目标运动坐标系,该坐标系记为xyz,随目标一起运动,坐标原点在弹体进动中心o,x轴与速度方向一致,指向弹头方向,z轴平行于弹道平面,y轴与x,z构成右手直角坐标系。如图2所示。显然,目标运动坐标系是时变的,原点为,各个坐标轴的指向也可以通过下式求得

为了后续叠加微动的计算方便,求解雷达视线角在目标运动坐标系中进行。需要完成雷达视线矢量从地心坐标系UVW到目标运动坐标系xyz的坐标变换

其中,MU-x为坐标转换矩阵,易通过目标运动坐标系各个坐标轴在地心坐标系中指向求出。若目标不存在进动,且0攻角飞行,对称轴即为x轴,雷达视线角Ψt为

2.2 目标进动的描述
若目标存在进动,产生雷达视线角的变化,进而导致目标RCS的改变。进动可通过两个参数来描述,进动角γ和进动角速度ω。进动角为锥体对称轴与速度方向的夹角。对于平稳的进动而言,γ为固定值。在目标运动坐标系系中,对称轴Lt-x指向可表示为

式中:α0——一常数。如图3所示。
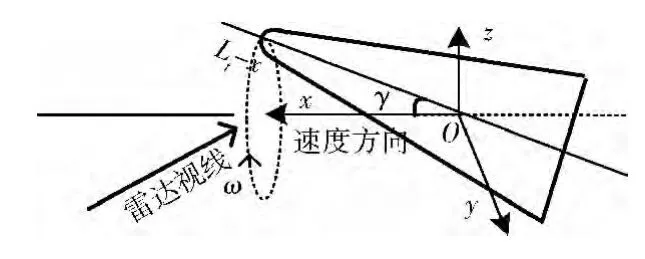
图3 进动圆锥目标
雷达视线角随时间的表达式为

将视线角Ψt和Rt作为输入参数,利用电磁理论建模技术完成目标的RCS仿真。
3 电磁散射动态建模
在常见雷达波段(如:C和X等),导体目标相对于雷达入射波处于高频区,目标的雷达散射回波可以采用高频电磁散射计算方法获取[8]。采用三角平面元对目标进行几何建模,在三角平面元上直接应用物理光学法(PO)和等效电磁流(MEC)计算目标RCS[8,9]。电磁波照射目标,表面会产生表面电流,这些电流向外辐射从而形成目标的回波。采用PO对目标的面电流积分,计算面元对电磁波的响应,采用MEC是对线电流积分,计算边缘对电磁波的响应,合成目标所有入射可见的面元和线元电流的远区散射场可得到目标的RCS。
对于动态目标,不同时刻的目标的姿态和距离随时间变化,雷达接收回波会产生多普勒效应。因此,对于动态导弹目标还需要对PO+MEC方法产生的RCS做进一步相位修正,用于模拟目标的多普勒信息。处理方法为

式中:c——电磁波速度,f——电磁波频率,σ0(f,t)——相位修正前RCS,σ1(f,t)——相位修正后RCS。
综上,动态建模的主要流程如图4所示。

图4 动态电磁建模流程
4 仿真实例及分析
主要仿真参数设置如下:目标体为球顶圆锥,160cm,底面直径50cm,半锥角6°;雷达照射频率10GHz;关机点坐标(东经60°,北纬0°),关机点高度80km;落点坐标(东经90°,北纬0°);雷达坐标(东经89°,北纬0°)。
假设目标轴向与速度方向相同,仿真得到目标飞行高度随时间的变化如图5所示。从关机到落地飞行时间981s,仿真得到的RCS时间序列及对应的雷达视线角如图6所示。仿真时,雷达布置在弹道平面内,在落点之前,目标先迎头进入,在弹道后期过顶和背离。当视线角84°时,雷达波与圆锥母线垂直,雷达散射出现RCS强峰。
再仿真目标的进动情况:仍采用图5所示弹道,设进动周期为5s,进动角10°,观测时间为600~610s,仿真得到雷达视线角序列和RCS回波如图7所示。对结果曲线进行自相关运算[10],平滑处理后,如图8所示。易得RCS起伏周期约5s,和设置参数一致。验证了仿真的正确性。

图5 目标飞行高度

图6 全弹道RCS仿真结果

图7 飞行弹头宽带RCS回波序列

图8 RCS回波序列的自相关结果
为了验证仿真相位的准确性,仿真雷达回波的频谱:设雷达脉冲串重频8k Hz,观测时间为600s~600.05s,共得到40个脉冲。得到归一化后的频谱如图9所示,多普勒谱峰的位置约-1.2k Hz。
按设定的仿真参数,可计算得在飞行时刻600s处,目标径向速度约3342.2m/s,则多普勒频偏约222.8k Hz。由傅里叶变换性质易得,速度频偏折叠到8k Hz的频带内,为-1.2k Hz。与仿真结果一致,验证了仿真回波相位结果的正确性。
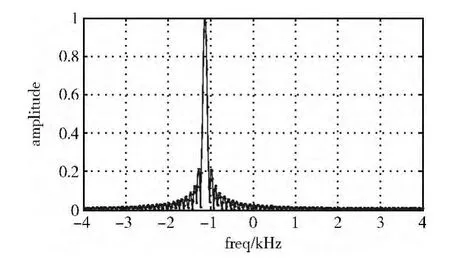
图9 飞行弹头宽带RCS回波序列
5 结束语
针对空间目标动态RCS仿真问题,给出了质心飞行运动的数学表达,描述了目标与雷达相对几何关系的解算过程,提出了利用物理光学和等效电磁流方法实时计算得到各个飞行时刻的目标RCS的方法。文中基于关机点和落点的参数反推弹道方程的仿真方法,算法简单。文中采用的实时计算RCS的方法代替了常规的查表插值法,提高了仿真的准确性。文中的仿真将地球简化为理想球体,而且忽略了自转的影响,后续研究中需要围绕这些问题进一步开展工作,提高仿真的逼真度。
[1]Philip van Dorp,Rob Ebeling,Albert G Huizing.High resolution radar imaging using coherent multiBand processing techniques[C]//Radar Conference,2010:981-986.
[2]LI Longyue,LIU Fuxian,MEI Yingying.Modeling and simulation system design of tactical ballistic missile interception based on UML[C]//Fourth International Conference on Computational and Information Sciences,2012:53-56.
[3]HU Wei,YANG Jianjun,LONG Guangzheng,et al.Dynamic modeling and simulation of RCS for TBM's post-boost guidance phase[J].Electronics Optics &Control,2010,17(4):22-25(in Chinese).[呼玮,杨建军,龙光正,等.弹道导弹被动段动态RCS建模与仿真[J].电光与控制,2010,17(4):22-25.]
[4]XIAO Bin,GUO Pengcheng,HENG Jun,et al.Ballistic simulation of tactical ballistic missile[J].System Simulation Technology,2008,4(4):213-218(in Chinese).[肖滨,郭鹏程,衡军,等.战术弹道导弹的弹道仿真[J].系统仿真技术,2008,4(4):213-218.]
[5]MA Liang,LI Yongzhen,CHEN Zhijie,et al.Research on simulation of dynamic full-polarization radar echo for spatial targets[J].Journal of System Simulation,2012,24(3):628-632(in Chinese).[马梁,李永祯,陈志杰,等.空间微动目标动态全极化回波仿真技术研究[J].系统仿真学报,2012,24(3):628-632.]
[6]NIE Zaiping,FANG Dagang.Electromagnetic scattering feature modeling of target and environment[M].Beijing:National Defense Industry Press,2009(in Chinese).[聂在平,方大纲.目标与环境电磁散射特性建模[M].北京:国防工业出版社,2009.]
[7]HUO Wei,WANG Xiaojun.Analysis of antimissile system based on trajectory simulation[J].Journal of CAEIT,2009,4(5):507-510(in Chinese).[霍伟,王晓钧.基于弹道仿真的反导系统分析[J].中国电子科学研究院学报,2009,4(5):507-510.]
[8]HUANG Peikang,YIN Hongcheng,XU Xiaojian.Radar system and information processing[M].Beijing:Publishing House of Electronics Industry,2010(in Chinese).[黄培康,殷红成,许小剑.雷达目标特性[M].北京:电子工业出版社,2010.]
[9]WANG Chao.High frequency electromagnetic scattering modeling and its application[D].Beijng:Communction University of China,2009:27-32(in Chinese).[王超.高频电磁散射建模方法及工程应用[D].北京:中国传媒大学,2009:27-32.]
[10]FENG Dejun,LIU Jin,DAN Mei.RCS periodicity of ballistic target in midcourse and its estimation algorithms[J].Journal of Astronautics,2008,29(1):362-365(in Chinese).[冯德军,刘进,丹梅.弹道中段目标RCS周特性及其估计方法[J].宇航学报,2008,29(1):362-365.]
