基于GIS的无人机航迹规划软件的开发
2014-01-22邱福生杨建平邵绪威
邱福生,杨建平,邵绪威
(沈阳航空航天大学航空航天工程学部(院),沈阳110136)
地理信息系统(Geographic Information System,简称GIS),是用于获取、存储、分析、显示地理空间数据的计算机系统。随着计算机技术的不断进步,GIS广泛地应用于空间数据输入、属性数据管理,数据显示、探查、分析和GIS建模等方面,并以此为基础解决更加复杂的问题[1]。无人机航迹规划就是在根据无人机自身机动性、战场环境和任务要求,为其选择一条安全有效的飞行路线[2]。在现代日新月异的高科技空战中,航迹规划是确保无人机对敌区进行远程侦察和精确打击必要途径之一[3-4]。ArcGIS Engine 是一个简单的、独立于应用程序的 Arc Objects编程环境[5]。本文利用ArcGIS Engine,开发出一款无人机航迹规划导航软件,在无人机地面站系统中嵌入数字地图功能,增强了无人机地面站系统应用的空间分析能力,提高了数字地图管理与航线规划的效率。
1 系统功能概述
本软件是基于成熟数字地图数据和全球定位系统(GPS)相结合,通过以太网通讯,航迹软件系统通过地面控制站获得无人机的GPS定位信息,并在数字地图上实时显示出无人机飞行航迹状态[6],实现无人机航线快速生成与加载。该航迹规划软件的难点在于对电子地图的设置和操作,由于电子地图包含了许多图层,每个图层同时也对应着许多的地理信息数据。该软件主要具有地图处理与显示、获取经纬度信息,设置航路点、生成航线等功能。整个无人机地面站控制系统的示意图如图1所示。航迹规划软件主要包括数据通信模块、地图处理显示模块和航迹规划模块,其中航迹规划模块包括航路点规划子模块、航路信息生成与校验处理子模块和历史航迹显示子模块,如图2所示。
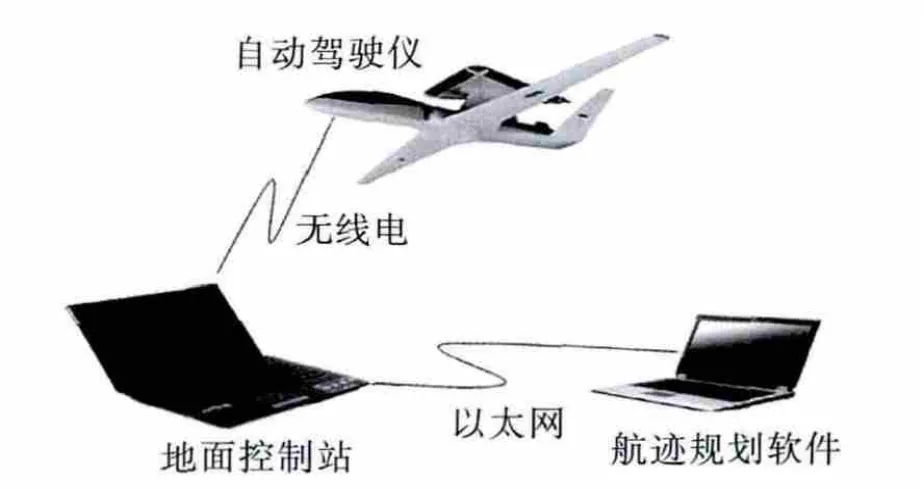
图1 无人机地面站控制系统示意图
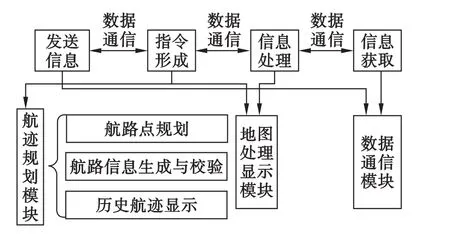
图2 航迹规划软件各模块之间的关系
2 算法描述及验证
2.1 威胁代价函数
当无人机进行三维航迹规划时,实质上是一个多约束优化问题,本文对航迹规划威胁代价函数采用线性加权的指标方法[2]。

其中li表示第i段航迹的长度,hi表示第i段航迹的海拔高度,n表示航迹段的总条数,J总表示各航迹段总威胁代价,w1,w2为权系数,w1+w2=1,由w2和w1的大小来选择飞机是从上方飞越还是从障碍侧边绕过。
2.2 算法描述
遗传算法在航迹规划中得到了广泛的应用,遗传算法的选择、交叉和变异算子在搜索最佳的航迹路线时,能够以随机的方式得到寻求最优解,新一代的子群体主要是通过上一代父群体之间进行交叉重组产生的,容易得到全局最优解附近的局部最优解,所以,单纯的使用遗传算法容易导致早熟和陷入局部最优解,而模拟退火算法能够对遗传算法寻优过程进行扰动,具有摆脱局部最优解的能力,在交叉和变异过程中用Metropolis准则判断新解是否可以被接受,使用两者结合的遗传模拟退火算法能够有效地解决陷入局部最优解问题,从而得到全局最优解[7]。
设定种群规模M,最大遗传操作代数N,交叉概率pc,变异概率pm,初始温度T=T0,温度更新次数 j=0,设定退火温度变化规律为 Tj+1=0.9Tj,终止温度为Te。遗传模拟退火算法流程图如图3所示:

图3 遗传模拟退火算法流程图
3 数据通信模块
地面站控制系统的数据通讯模块包括以太网网络和无线电网络两部分组成,无线电网络可以实现地面控制站和无人机自动驾驶仪的在线通信,是地面控制站和无人机自动驾驶仪交互信息的一种方式。以太网网络是为了实现航迹规划系统与地面控制站之间的信息传递,完成无人机航迹规划和实时路径显示,可以将航迹规划软件中的航迹路线传送给地面控制站,也可以将控制站接收到的无人机GPS实时地将数据传送给航迹规划软件。
4 地图处理显示模块
4.1 地图处理
数字地图具备多种可选图层,能够显示包括卫星、行政区域、等高线视图等多种地理信息的实时地图,同时也可以根据实际情况,在数字地图上编辑禁飞区、降落区、备降区等特定区域,以便在规划航线时使用。在Form1窗体上添加一个ToolbarControl控件,一个 MapControl控件,一个LicenseControl1控件,然后为 MapControl添加放大、缩小、平移、测距、图层管理等工具,就可完成对地图的基本操作。其中各选项功能如下:
(1)放大:在地图上任一位置点击时,滚动向下鼠标中键或按“+”按钮,地图将以鼠标点所在位置为中心,逐步放大比例尺显示;
(2)缩小:在地图上任一位置点击时,滚动向上鼠标中键或按“-”按钮,地图将以鼠标点所在位置为中心,逐步缩小比例尺显示;
(3)平移:将鼠标光标移至某一位置,按住鼠标左键在屏幕上拖动地图,地图界面就会沿着拖动方向移动;
(4)测距:用于航线规划人员在数字地图上测量规划的一条直线长度或者多条连续折现的总长度;
(5)图层管理:用于对图层进行添加、更新、删除和移动等管理功能,并可对图层属性进行控制[8]。
4.2 获取经纬度信息
无人机在飞行时能将自身的GPS定位信息反馈给地面站,经过数据处理后能够转换成二维的经纬度信息显示在数字地图上,在数字地图上进行操作时,反馈回来的定位信息能够给用户提供航线规划指导,方便增加、调整和删除相关航路点的位置[9]。在鼠标移动事件情况下,调用相应的函数就能动态获得鼠标所在地图位置的经纬度坐标信息.。屏幕坐标可以通过函数体中的关键代码转化成地图坐标。
4.3 获取高程信息
等高线指的是各个高程相等的点连接而成的闭合曲线,是把地面上海拔高度相同的点连成的闭合曲线。等高线可以为无人机在航迹规划中提供飞行高度参考,从而确定无人机的飞行高度。
5 航迹规划模块
5.1 航路点规划
航迹规划的目的是在一定的时间内为无人机设计出一条安全可行的飞行航迹,飞行航迹包括一系列航路点,航路点的属性存储该点经纬度、飞行高度、速度等信息。根据无人机飞行任务需求,可以利用鼠标在数字地图上手动选取航路点,或者通过键盘输入航路点的三维坐标。用鼠标在数字地图上选取航路点时能够显示航路点的经纬度、距离上一航点的距离、航点属性[10]。航路点的类型共有6类,分别是机场点、主航点、过定点、盘旋点、任务起点和任务终点。
5.2 航路信息生成与校验
根据已经设置好的航路点编号和航路点坐标,选取符合飞行需求的航路点,各个被选的航路点按照被选取的先后顺序,通过线段连接生成一条航线[11],用程序实现在电子地图上航线显示功能。航线的类型共有4类,分别是主航线、着陆航线、返航航线和迫降航线。
航路信息校验的主要功能是加载已规划的航路文件,在地图上以航点及线条形式表现出来,用于检验航线规划软件的正确性。根据已经生成的航路信息,分二维模式与三维模式对试飞规划航路进行模拟,即自动在数据地图上生成平面航线模拟,在虚拟背景下进行航线三维飞行模拟,用于校验生成航线的性能,主要有以下几方面:
(1)闭合完整性:生成航线是否闭合完整,从起飞至飞回机场是否可安全降落;
(2)飞行畅通性:生成全航线飞行过程中是否有禁飞区域或危险区域,航线是否畅通合理,避免运算生成往返折线;
(3)机动合理性:全航线飞行过程中的起飞、降落、机动转弯、盘旋运动检查,是否正确。
5.3 历史航迹显示
无人机在飞行过程中,飞行到达的经度、纬度和高度信息都被保持在数据库中,可以方便技术人员进行数据分析和处理,在历史航迹显示子模块下,可以已经保存好的飞行数据解码、拆分和转换,能够再现航路信息生成时的航迹,显示出无人机飞行中的详细情况。历史航迹显示的不是现在操作回放的时间,而是直接从数据库导航信息表中读取飞行航迹各相关信息,显示的是当时执行飞行任务的时间。
6 结语
本文以ArcGIS Engine组件为地理信息平台,以遗传模拟退火算法为理论依据,研究并开发出一款无人机航迹规划软件,并对软件的设计方案和功能进行介绍,无人机指挥人员可以根据飞行任务需要。规划航路点和航线,在电子地图上实时监控无人机的飞行路径,并根据情况需要,及时对飞行路线进行修改和调整。软件运行稳定,界面友好,操作简单方便,实现了航迹规划的科学性和实用性,提高了部队和科研人员的规划效率,为无人机执行飞行任务提供了重要的保障。
[1]陈建飞,地理信息系统导论[M].北京:清华大学出版社,2009:1 -9.
[2]郑昌文,严平,丁明跃,等.飞行器航迹规划[M].北京:国防工业出版社,2008:27-40.
[3]Gilmore J F.Autonomous vehicle planning analysis methodology[C]//The Proceedings of Association for Unmanned Vehicles Systems Conference,Washington D C,USA,1991:67.
[4]Hura M,Mcleod G.Route planning issues for low observable aircraft and cruise missiles:implications for the intelligence community.RAND,Santa Monica,CA,1993:234.
[5]邱洪刚,张青莲,陆绍强,等.ArcGIS Engine开发从入门到精通[M].北京:人民邮电出版社,2010:45.
[6]吴益明,卢京潮,魏莉莉,等.基于GIS的无人机航迹系统的设计与实现[J].弹箭与制导学报,2006(2):1056-1058.
[7]周明,孙树栋.遗传算法原理及应用[M].北京:国防工业出版社,1999:65.
[8]王磊.基于MapX的电子地图路径规划软件设计[J].计算机与数字工程,2012,40(5):114 -116.
[9]刘波,卢京潮,吴益明.无人机地面导航站系统的设计与实现[J].计算机测量与控制,2006,14(12):1714-1716.
[10]崔文,崔焕东,张嵩.基于GIS组件的航迹标绘系统设计与实现[J]测绘与空间地理信息,2012,35(2):107-109.
[11]赵磊,杨磊,闫鹤,等.基于GIS的直升机辅助航迹规划探讨[J].北京测绘,2012(1):54-55.
