基于Matlab 的水田激光平地机系统模拟仿真
2014-01-03陈君梅
叶 娟,陈君梅*
(广东科学技术职业学院广州学院,广东广州,510640)
0 引言
我国是农业大国,发展农业规模化和精细化生产离不开土地平整技术。农田表面平整状况对地面灌溉质量和效率有着重要影响, 应用激光控制平地技术进行农田土地平整, 可以有效改善农田表面状况, 提高农田灌溉水的利用率, 实现精细地面灌溉。世界范围内的大量研究表明,土地被平整后可提高庄稼产量20 ~30%,可节水30 ~50%,水田土地利用率提高9%,并可减少农药、化肥和除草剂的使用量。激光平地技术是现有的最先进、最有效的土地精平技术,是农业生产中一项重要的节本增效措施,应用前景开阔,对农业机械化建设具有重要意义。
通过对水田激光平地机平地铲工作原理的分析和数学推算,建立水田激光平地机平地铲液压伺服系统(电磁阀)传递函数模型。
水平平地铲工作示意图如图1 所示,经过初步推算,建立平地铲传递函数模型为

拟对该模型使用Matlab 进行机械、液压、电控系统仿真,以求达到理想控制效果。

图1 平地铲工作示意图
1 系统模拟概述
系统模拟(亦称系统仿真)是指通过建立和运行系统的数学模型,来模仿实际系统的运行状态及其随时间变化的规律,以实现在计算机上进行试验的全过程。这是近年发展起来的一门新兴技术学科。实际对象通常是复杂系统,难以通过真实的实验来进行分析、研究。因此,系统模拟技术就成为十分重要甚至必不可少的工具。本文中介绍的水田激光平地机,有高程控制系统而且拥有独立的水平控制系统,能较好地保持平地铲水平,具有良好的平地效果,能满足更广泛、更实际的水田地形条件。但水田激光平地机功率大机身重,易受干扰而出现误操作,在田埂转弯处水平难以控制。现场实践操作工作不协调,相互干涉,工作效率偏低。我们采用系统模拟通过对水田激光平地机模拟运行过程的观察和统计,得到被模拟系统的模拟输出参数和基本特性,以此来估计和推断实际系统的真实参数和真实性能,为真实系统问题的决策提供科学依据。
系统模拟作为系统研究和实践中的一个重要技术手段,在求解水田激光平地机传递函数模型等复杂的系统问题中,具有下列几个特点:
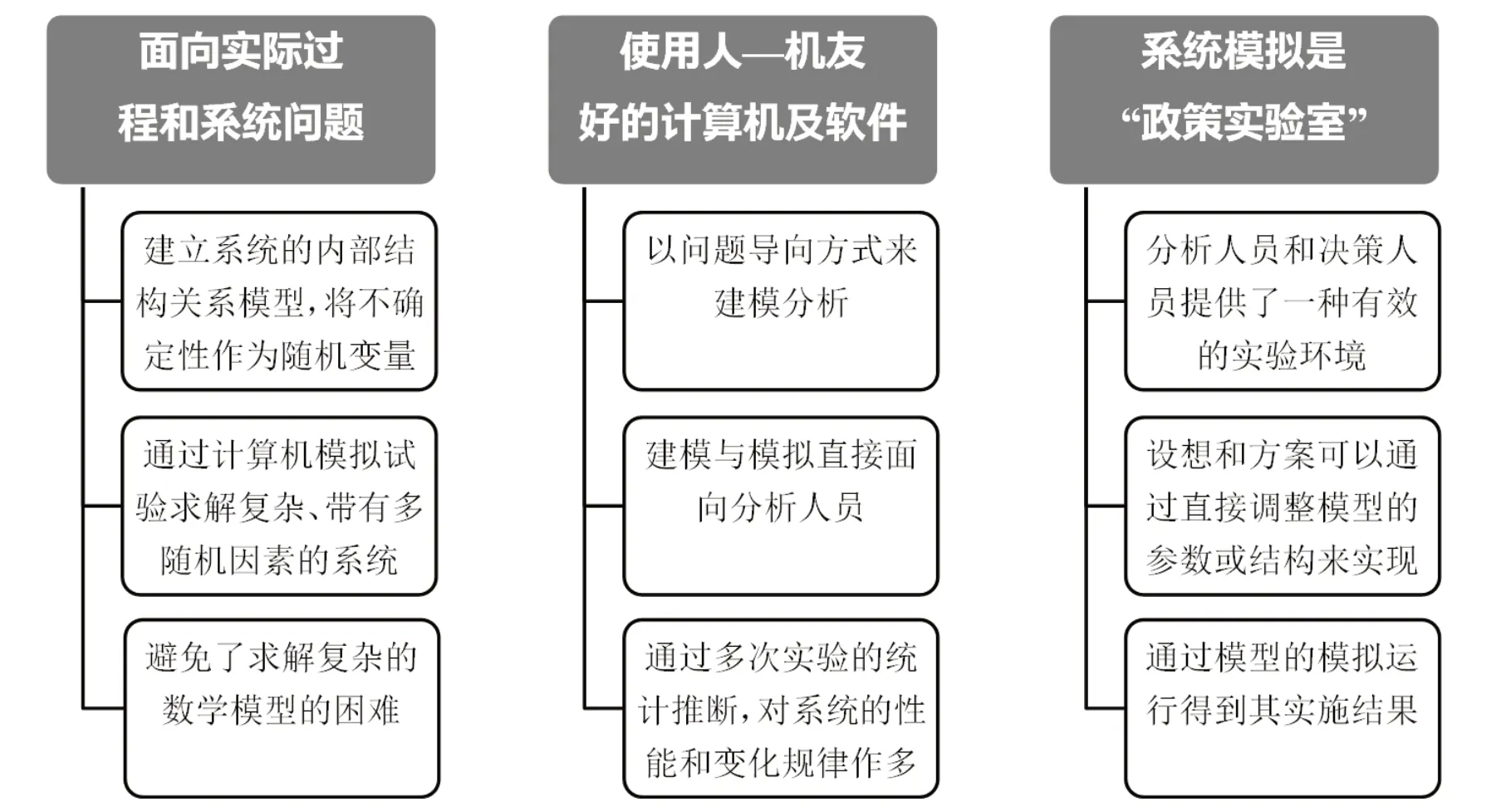
图2 系统模拟的特点
2 激光平地机系统模拟分析
激光平地机工作时,激光发射器发出旋转光束,在工作地块的定位高度上形成一片光平面,此光平面就是凭证地的基准平面。激光接收器安装在靠近刮土铲铲刃的固定杆上,从激光束到铲刃之间的这段固定距离,即为标高定位测量基准。当接收器检测到激光信号后,不停的向控制箱发送电信号,控制箱接收到标高变化的信号后,进行自动修正,修正后的电信号控制液压控制阀,以改变液压油输向油缸的流向与流量,自动控制刮土铲的高度,使之保持定位的标高平面,即可完成高精度的土地平整作业。
激光不但发射频率大而且传输速度也快,因此在实验过程中,直接针对单个激光粒子或激光脉冲直接进行分析研究可行性较低,该仿真系统以可视化的激光传输过程、机械、液压系统的动态管理和电控系统的虚拟训练为对象。通过模拟,实现位置偏差信号识别,可实时控制平地铲的移动方向与幅度,完成一体化仿真。操作人员全面把握试验过程中各元器件的安全状态,并检验装置的合理性等,通过计算软件Matlab 的处理,记录、对比实验数据,获得一个完整全面的分析结果,不断改进和完善水平控制系统,直至达到最优控制效果。因此,激光平地机系统模拟应具备以下功能:

图3 系统模拟的功能
3 编程方法实现
MATLAB 是由美国mathworks 公司开发的高科技计算环境,具有数值分析、矩阵计算、科学数据可视化、非线性动态系统的建模和仿真等强大功能。以高性能的数组运算(包括矩阵运算)为基础,不仅实现了大多数数学算法的高效运行函数和数据可视化,而且提供了非常高效的计算机高级编程语言。在激光平地机的仿真系统中,通过分析和数学推算,建立电磁阀传递函数模型,以Matlab 实现仿真数据的后处理,建立了粒子系统进行管理,再对激光光束传输的可视化建模、传递函数模型计算机三维仿真验证。
激光感应系统的灵敏度较人工肉眼判断和拖拉机上操作人员的手动液压系统准确10 ~15 倍,采用水平控制算法,使水平控制精度提高20%以上,加入控制参数自适应和自诊断功能,实现水平控制与高程控制协同工作。仿真流程为:
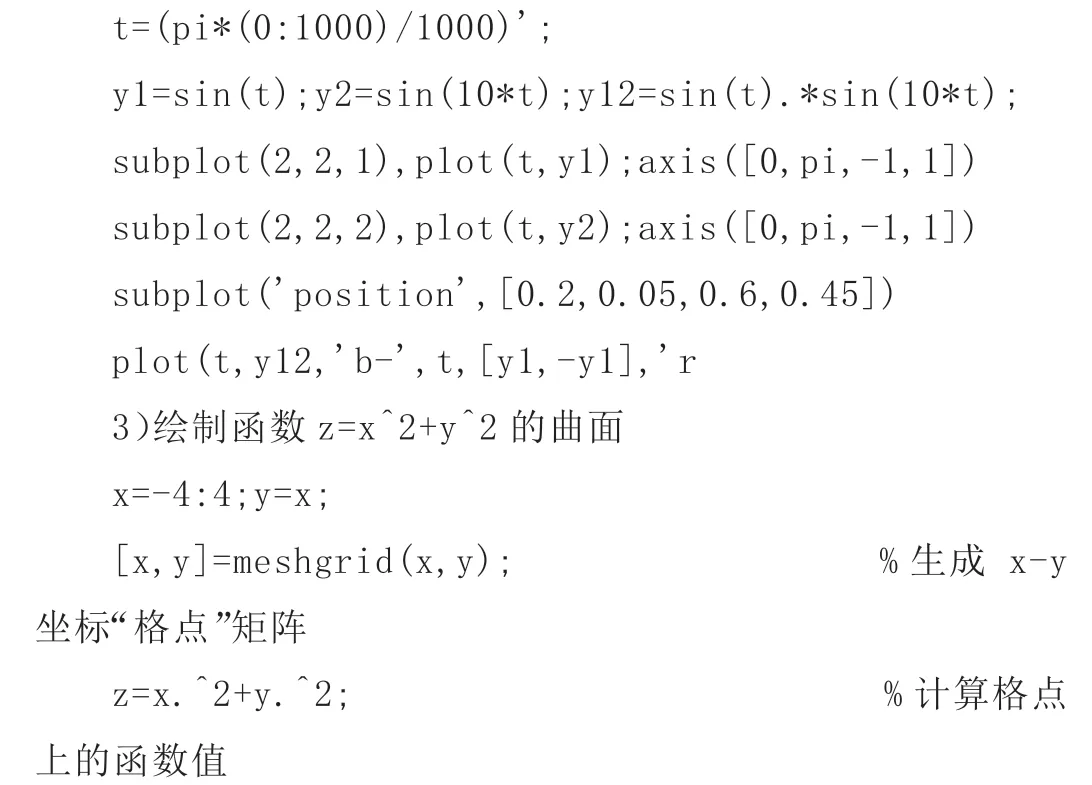
南方水田硬底层高低不平,水田激光平地机利用MATLAB软件完成编程如下:
1)假设x,y,z 组成一组曲线的坐标参数,当x,y,z 是同维向量时,则x,y,z 对应元素构成一条三维曲线。当x,y,z 是同维矩阵时,则以x,y,z 对应列元素绘制三维曲线,曲线条数等于矩阵列数。

2)MATLAB 具有极其强大的数据可视化功能,可制作激光平地机具有出版质量图形,在同一图形窗口布置几幅独立的子图,产生的子图彼此独立。

4 结论
在水田激光平地机中应用Matlab 软件实现系统模拟仿真,有助于我们实现高效的开发、调试,耗时短,耗资小,耗材少,通过仿真校验分析,不断地修订算法和函数模型,做到了直观显示与复杂计算的统一,以获取最佳状态和最精准参数,实现控制效果最优化。

图4 系统仿真流程
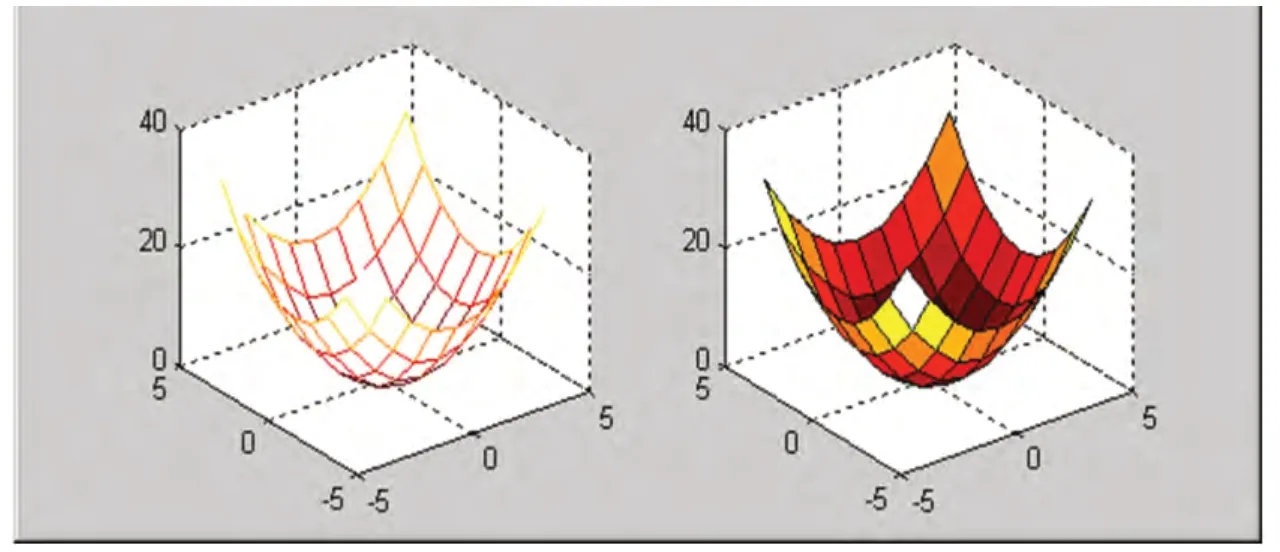
图5 曲面的绘制结果
[1] 姚亚萍.激光控制平地系统的研究与设计[D].西北农林科技大学2010 届攻读硕士学位研究生学位论文,2010.
[2] 黎永键,赵祚喜.水田激光平地机平地铲姿态测量系统的设计[J].农机化研究,2012,(2):69-74
[3] 葛建兵,倪向东,李盛林,曹杰.Multisim 在激光控制平地机控制器设计中的应用[J].中国科技博览,2009,(7):30.
[4] 夏文俊,王峻峰,李世其.基于虚拟样机的激光传输模拟仿真系统开发[J].系统仿真学报,2007,(14):3237-3240
[5] Rickman J F.Manual for laser land leveling[R]. Rice-Wheat Consortium Technical Bulletin Series 5,2002.
