环境一号卫星A/B星数据自动几何精校正设计研究
2014-01-02熊文成申文明史园莉肖如林
熊文成,申文明,王 桥,史园莉,肖如林,付 卓
(环境保护部卫星环境应用中心,北京 100094)
1 前言
我国经济社会的快速发展带来了巨大的环境问题,如水体污染、城市垃圾、大气污染、生态破坏等。现在环境问题已经严重制约了我国经济社会的发展。要解决环境问题,首先必须了解我国的环境状况,这就需要对环境质量进行有效监测。环境一号卫星是我国自主研制的小卫星星座,其目标之一就是对我国环境质量状况进行严密监测[1]。综合有效地利用环境一号卫星各载荷数据,对实现我国生态破坏、环境污染进行大范围、全天候、全天时动态监测,对生态环境质量变化的过程和趋势的预测都有着重要意义。要实现对各载荷数据的综合应用,业务化地数据几何精校正是一个重要的基础[2~4]。
一般来说,图像的几何精校正过程可以分为地面控制点选取、模型纠正、重采样3个步骤。传统的控制点选取方式主要是人工在图像上有明显的、清晰的定位识别标志处选点,如道路交叉点、河流叉口、建筑边界、农田界线[4]。自动选点则主要是基于基准影像和配准影像相似性关系,自动匹配选点的过程。自动匹配在减少人工选点的主观性以及提高工作效率方面有着重要意义。自动匹配的方法在国内外研究较多,基本可以分为基于灰度的匹配和基于特征的匹配[5,6]。基于灰度的图像匹配算法主要有相关系数法、互信息法、傅里叶变换法、最小二乘法[7~11];基于特征的图像匹配算法主要有基于角点检测的图像配准方法和基于图像特征描述符的配准方法。角点检测方法有Harris角点检测算法和Susan角点检测算法;常用的特征描述符图像配准算法有尺度不变特征变换匹配(SIFT)算法和加速稳健特征(SURF)算法[12~15]。转换模型(校正方法模型)要根据遥感图像几何畸变的性质来确定。现有的纠正模型主要有物理模型、有理函数模型、多项式拟合或三角网拟合等[2]。重采样主要有3种方法,即最邻近点法、双向线性插值法、三次褶积法。
为实现环境一号卫星数据业务化运行,本文从影像自动配准的角度,研究环境一号A/B星数据的自动几何精校正技术的设计与实现。
2 环境一号卫星载荷说明
2008年9月6日,环境一号卫星“2+1”星座中的两颗光学小卫星(A星和B星)“一箭双星”发射成功。环境一号卫星A星搭载了两个charge-coupled device(CCD)相机(CCD1、CCD2)及一个高光谱成像仪(HSI);环境一号卫星B星搭载了两个CCD相机及一个红外相机(IRS)。具体参数可见文献[1]。
环境一号卫星A/B星有以下特点:a.A星与B星上的4台CCD相机参数基本一致,这意味着4台CCD相机的图像具有良好的相关性;b.A星上CCD与高光谱成像仪是同平台不同载荷,B星上CCD与红外多光谱相机是同平台不同载荷,同平台数据具有较好的几何相关性,具体关系可见图1、图2。

图1 环境一号卫星A星2级数据产品几何关系图Fig.1 Geometric relationship of HJ-1A satellite

图2 环境一号卫星B星2级数据产品几何关系图Fig.2 Geometric relationship of HJ-1B satellite
3 环境一号卫星数据几何特点
环境一号卫星地面处理分系统向外分发的环境一号卫星数据主要为2级产品,2级产品为经过系统几何校正和相对辐射校正的产品。由于环境一号卫星的小卫星平台、大幅宽等特点,其数据几何畸变现象较为突出。本文从环境一号卫星2级数据的外部定位精度及内部几何畸变分析环境一号卫星数据几何特点及变形规律。
3.1 环境一号卫星2级产品定位精度
定位精度是指卫星产品的几何定位精度,即2级产品图像上地理位置和真实位置之间的差异。外部定位精度评价以LandsatETM几何精纠正数据产品为参考图像,在环境一号卫星的2级图像以及参考影像上,选择多个均匀分布的匹配同名点,分别获取环境一号卫星数据和参考数据的图像坐标,然后计算出匹配点(环境一号卫星图像坐标和参考图像坐标)的差值。通过计算多景不同地区(东北、西南、西北、中部)2级图像的位置误差值,并把总的均方根误差作为环境一号卫星2级数据的定位误差。经多景统计,环境一号卫星A/B星的几何定位精度评价结果见表1、表2。

表1 环境一号卫星A星几何定位精度评价结果Table1 Geometricalpositioning accuracy evaluation resultsof HJ-1A satellite m

表2 环境一号卫星B星几何定位精度评价结果Table2 Geometricalpositioning accuracy evaluation resultsof HJ-1B satellite m
综合来看,环境一号卫星A/B星的几何定位精度大约为1 100m。
3.2 内部几何畸变
遥感图像的几何形变是指图像上像元在图像坐标中的坐标与其在地图坐标系统等参考系统中的坐标之间的差异[2]。形变可由传感器结构等因素引起,如摄影机的焦距变动、像主点偏移、镜头畸变等;也可由遥感器以外的各因素所造成的误差引起,如传感器的外方位变化、传感器介质的不均匀、地球曲率、地形起伏、地球旋转等因素所引起的误差。
图像内部几何变形可以归纳为长度变形、角度变形和放射变形等指标,评价的内容包括变形的绝对量和整幅图像变形的一致性。具体的方法如下所述。
1)从图像上选择同名控制点20~30对,并从4个方向(垂直轨道、沿着轨道和对角方向)大致进行配对与分组。每组类别中有20组左右的配对点。
2)计算图像上点对距离与地图上各同名点对距离的相对差距。点对距离是指图像上两点的距离,即

式(1)中,(L1,P1)和 (L2,P2)分别为图像上两个点的坐标;Δp为图像分辨率。图像上点对距离diimg与地图上同名点对距离diref的相对差距为

统计每组配对点间的距离差的均值作为变形误差,即

3)计算8个方位的控制点到景中心的距离变化,得到相对变化程度和矢量方向。计算方法与上一步类似。
将4个方向控制点间相对几何误差以及各方位控制点相对于景中心的几何定位误差取平均得到,环境一号卫星A/B星的内部几何相对误差是0.12%~0.17%,绝对误差是100~400m。
从分析结果来看,环境一号卫星数据内部几何误差较大,从各个方向的统计值来看,也没有展示出明显的规律。这对于进行下一步的几何精校是一个挑战。
4 自动几何精校正流程设计
基于环境一号卫星A/B星的参数特点,几何定位以及内部形变等特点,本文设计了环境一号卫星A/B星自动几何精校正的技术流程。
4.1 总体几何校正流程设计
环境一号卫星多载荷数据总体几何校正流程设计如图3所示。

图3 环境一号卫星多载荷数据总体几何校正流程Fig.3 Geometric correction of HJ-1 satellite multi-sensor data
总体流程的设计基于以下3个方面。
1)利用同平台的高分辨CCD对高光谱数据实现几何自动匹配。高光谱成像仪在光谱复原后任一波段的切片数据相当于一幅多光谱CCD相机单波段数据,两者数据的辐射机理是相同的。同星平台获取的CCD和高光谱数据具有较好的相似性。
2)利用同平台的高分辨CCD对红外相机数据实现几何自动匹配。CCD数据第四波段和红外相机第一波段,波长较为接近,辐射机理相同。且同星平台的CCD与红外相机数据具有较好的相似性。
3)利用环境一号卫星CCD精校正影像作为控制库。相对于基于控制点影像库的方法,控制影像易于维护以及匹配更多的点,而控制点库可能由于地物的变化而需要进行更新,并且影像局部受云雨污染时难以进行匹配。另外,同源的环境星CCD较异源影像(如ETM/TM控制库)具有更好的匹配性,自动匹配的精度和准确性更高。
因此本流程的关键是对环境一号卫星CCD影像实现自动几何精校正。
4.2 环境一号卫星CCD影像自动几何精校正
实现CCD影像的自动几何精校正的关键也就是实现待纠正的CCD影像与CCD控制库影像的自动匹配。
基于灰度和特征的图像配准方法各有优缺点[5]。基于灰度的图像配准算法简单,计算量大,耗时长,对光照条件敏感。当待匹配点位于低反差区内,即在该窗口内信息贫乏,信噪比很小,基于灰度的匹配算法成功率不高。而基于特征的图像配准算法可以在一定程度上克服此缺点,但在精度上逊于基于灰度的图像匹配算法。因此,环境一号卫星数据的校正将结合两种方法的优势,以达到快速、准确的配准效果。
环境一号卫星CCD数据匹配策略利用了基于灰度的匹配和基于特征的匹配相结合的方式。利用金字塔影像结构,将上一层影像的特征匹配结果传到下一层作为初始值,并考虑对粗差的剔除或改正。最后以特征匹配结果为“控制”,对其他点进行匹配或内插。由于基于特征匹配是以“整像素”精度定位,因而对需要高精度的情况,将其结果作为近似值,再利用最小二乘影像匹配进行精确匹配,取得“亚像元”精度[15,16]。环境一号卫星配准策略流程见图4,可以分为以下几个步骤。

图4 环境一号卫星配准策略流程Fig.4 CCD registration flow of HJ-1 satellite
1)建立金字塔分层影像。环境一号卫星CCD数据特征匹配方案应用了金字塔分层影像数据。金字塔影像的建立按照2×2像元变换成一个像元,此时,上一层的结果与下一层2×2个像元的公共角点相对应。利用三级金字塔逐级精化,利用顶级金字塔数据量小的特点进行快速初始定位,利用顶级金字塔初始定位引导中级金字塔进行初始定位精化,利用中级金字塔精化的初始定位引导底层金字塔或原始影像精匹配。
2)特征提取。在特征点检测阶段优先采用Fast、Harris、Susan等速度较快的角点检测算法。本研究采用的是Fast特征点检测算法。
3)粗差剔除。在一个小范围内利用二次曲面为模型进行拟合,将残差大于某一阈值的点作为粗差剔除。当所有错误的匹配点作为粗差剔除后,即得到与目标模型一致的匹配点对。有效的粗差剔除决定了影像配准是否成功,粗差剔除是匹配关键关节。必须采用稳健的粗差剔除方法保证配准成功。本研究考虑小概率事件原理粗差剔除,按照5%小概率事件发生原理,可认为超过中误差2倍的匹配点为粗差,进行迭代剔除可达到粗差剔除目的。
4)校正模型。针对环境一号卫星2级数据,几何校正模型可采用多项式校正模型。遥感图像的总体变形是图像的平移、缩放、旋转、仿射、偏扭、弯曲以及更高次的基本变形的综合作用结果,这样的变形用一个严格的数学表达式来描述是困难的,可以用一个适当的多项式来描述校正前后图像相应点之间的坐标关系。
5)重采样。经空间变换后输出的新图像像元,在多数情况下会落在原始图像阵列中的几个像元之间(即共轭位置),因此输出图像的像元灰度值,必须通过适当的方法把该点四周邻近的若干个整数点上的像元灰度值对该点的灰度值贡献累积起来进行计算,这个过程称为数字图像的重采样。校正空间网格上的亮度值等于原始图像空间共轭点的亮度值,即

式(4)中,(ε,η)为校正空间某点坐标;(X,Y)为该点在原始图像空间上的共轭点坐标。
通常有3种方法确定共轭点的亮度值f(X,Y),即最邻近点法、双线性插值法,三次褶积法。
4.3 环境一号卫星高光谱与红外相机数据自动几何精校正
环境一号卫星红外相机数据和高光谱数据以同步成像的CCD数据进行匹配校正。由于是同步成像,匹配的成功率一般较高。
4.3.1 高光谱与CCD图像配准
在特征点检测阶段优先采用Fast、Harris、Susan等速度较快的角点检测算法。以CCD图像为基准地图,特征匹配阶段建立2层金字塔。并且,由于CCD与高光谱同时搭载在A星上,受外方位元素引起的形变以及地形引起的形变具有很大的相似性,两个载荷之间的几何差异主要是平移和旋转等差异。因此,校正模型采用一次多项式即可。参与匹配的波段尽量采用CCD第四波段和高光谱数据波长类似的波段。通过配准,其配准精度可以小于1个像素。
4.3.2 红外与CCD图像配准
在特征点检测阶段优先采用Fast、Harris、Susan等速度较快的角点检测算法。以CCD图像为基准地图,特征匹配阶段建立2层金字塔。并且,由于CCD与红外相机同时搭载在B星上,因此受外方位元素引起的形变以及地形引起的形变具有很大的相似性,两个载荷之间的几何差异主要是平移和旋转等差异。因此,校正模型采用一次多项式即可。参与匹配的波段尽量采用CCD第四波段和红外相机的第一波段,因为这两个波段之间的相关性最高。通过配准,其配准精度可以小于1个像素。
4.4 精校正结果
根据以上方法、流程设计,环境一号卫星数据处理系统已经实现了环境一号卫星数据的自动几何精校正。本研究在全国范围内各个方向上选取10景影像。利用自动几何精校正方法进行自动匹配选点、校正,并进行精度结果抽样检验,结果见表3,典型效果见图5~图7。

表3 多项式几何精校正Table3 Polynom ialgeometric precision correction
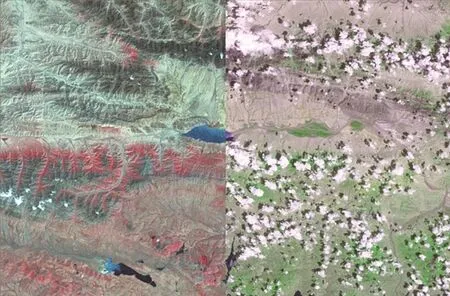
图5 CCD纠正细节Fig.5 Correction detailsof CCD image

图6 CCD与高光谱配准影像细节Fig.6 CCD and HSI im age registration

图7 CCD与红外配准影像细节Fig.7 CCD and infrared image registration
5 结语
本文分析了环境一号卫星2级数据(系统几何校正后的数据)的几何特点。系统几何校正后的环境一号卫星数据外部定位精度大概是1 km;另外,由于环境一号卫星平台为小卫星平台,并且图幅的幅宽很大,几何变形规律性不强。其内部畸变也可以达到10多个像素,这给准确的几何精校正带来很高的难度。
基于环境一号卫星数据的特点,本文设计了自动几何校正方法流程。对于CCD影像,笔者利用自动匹配的多项式方法进行校正,其优势是快速且成功率较高,缺点是对部分地区(尤其是山地)的校正精度有限。对于红外相机和高光谱数据的几何校正,由于其与同星CCD的高度相关性,可以利用同星CCD进行自动匹配校正。通过实际数据评测,结果表明,环境一号卫星CCD经自动几何精校正后,图像精度可从1 km改善到2个像素(60m)以内。同星不同载荷图像之间自动匹配方法可以获取小于1个像素的图像匹配精度。
总之,基于自动匹配的选点和精校正对环境一号卫星数据大批量处理具有重要意义,一方面可以减少人工选点的误判而带来的误差,另一方面可以大大节省人力的投入。
[1] 王 桥,魏 斌,王昌佐,等.基于环境一号卫星的生态环境遥感监测[M].北京:科学出版社,2010.
[2] 朱述龙,张占睦.遥感图像获取与分析[M].北京:科学出版社,2000.
[3] 张永生.遥感图像信息系统[M].北京:科学出版社,2000.
[4] 赵英时.遥感应用分析原理与方法[M].北京:科学出版社,2003.
[5] 余 涛,王 桥,魏 斌.环境一号卫星遥感数据处理[M].北京:科学出版社,2013.
[6] Barbara Zitova,Jan Flusser.Image registration methods:A survey[J].Imageand Vision Computing,2003,21:977-1000.
[7] Li Xiaoming,Zhao Xunpo,Zheng Lian,et al.An image registration technique based on Fourier-Mellin transform and its extended applications[J].Chinese Journal of Computers,2006,29(3):116-122.
[8] Castro ED,MorandiC.Registration of translated and rotated imagesusing finite Fourier transform[J].IEEE Transactions on Pattern Analysisand Machine Intelligence,1987(9):700-703.
[9] Viola P,WellsW.Alignment by maximization ofmutual information[J].International Journal of Computer Vision,1997,24(2):137-154.
[10] Thevenaz P,Unser M.A pyram id approach to sub-pixel image fusion based on mutual information[C]//Proceedings of the IEEE International Conference on Image Processing.Lausanne,Sw itzerland,1996,1:265-268.
[11] Thevenaz P,Unser M.An efficientmutual information optim izer for multiresolution image registration[C]//Proceedings of the IEEE International Conference on Image Processing.Chicago,Illinois,USA,1998:833-837.
[12] Goshtasby A.Description and discrimination of planar shapes using shapematrices[J].IEEE Transaction on Pattern Analysis and Machine Intelligence,1985,7(6):738-743.
[13] Goshtasby A.Image registration by local approximation methods[J].Imageand Vision Computing,1988,6:255-261.
[14] Danip P,Chaudhuris.Automated assembling of images:Image montage preparation[J].Pattern Recognition,1995,28(3):431-445.
[15] 章毓晋.图像工程:下册[M].北京:清华大学出版社,2004.
[16] 李 峰,周源华.采用金字塔分解的最小二乘影像匹配算法[J].上海交通大学学报,1999,33(5):513-519.
