基于Simulink 的伺服系统动态性能仿真研究
2013-12-23张晨光杨凤彪
张晨光,赵 霞,杨凤彪
(军械工程学院 车辆与电气工程系,石家庄 050003)
0 引言
伺服系统是自动化武器装备、工业控制系统的重要组成部分,其动态性能指标对系统整体性能有着决定性的影响。针对目前伺服系统在生产调试、维修检测过程中过分依赖以往经验,盲目性大,调试周期长等不足之处[1],借助MATLAB/Simulink 工具建立了伺服系统的数学仿真模型。利用该模型可以准确、方便的分析、研究伺服系统动态性能指标与测试调整方法,避免了反复开机运行的复杂操作、简化了施加多种传感器采集测试的过程,对研究伺服系统性能、维修调试、配套测试设备的开发都具有重要意义。
1 伺服系统原理简介
某型伺服系统为数字式伺服系统,用于特定目标的自动跟踪,其电路原理框图如图1 所示。
伺服系统采用三闭环结构,其中位置环为最外环,由数字控制电路来实现;速度、电流环为内环,利用模拟电路来实现。其工作过程如下[2-3]:主控计算机将目标位置信息数字量发送至伺服系统数字控制电路,数字控制电路将此信号与采集的系统当前位置信息比较,经合适控制算法生成速度环数字主令。该主令经D/A 转换后送入速度调节器输入端,速度调节器将其与测速反馈信号比较生成电流环主令信号,经电流调节器比较控制后通过功率放大电路施加到执行电机,驱动负载运动。

图1 伺服系统电路原理框图
2 伺服系统仿真模型的建立
2.1 数字控制电路建模
伺服系统对动态性能与稳态性能指标要求较高,能够实现快速、高精度的稳定跟踪。为了达到上述目的,数字控制电路采用变结构的控制方式,即根据位置量偏差自动选择切换控制算法。当系统位置量偏差较大时,采用平方根控制方式以保证快速性;当偏差较小时,采用PID 控制方式以消除偏差实现准确定位。
2.1.1 PID 控制方式模型
比例控制可以减少系统稳态误差,但不能消除;积分控制可消除误差,但可能影响系统超调量;微分控制能够预测偏差,产生超前校正,改善动态性能[4]。将三种作用组合起来形成PID 控制方式,当系统输入、输出分别为e(t)、u(t)时,可得到其微分方程表达式:

对于数字控制系统,上述控制方式由数字控制器或计算机通过软件实现,需将表达式离散化转换成差分方程[5]。当采样周期T 足够短时,可用求和、差商代替积分与微分,得到差分方程表达式为:

对于伺服系统而言,为保证快速瞬态响应、减小超调量,采用ITAE 性能准则对控制器参数KP、KI、KD进行整定[6-7],使其满足输入偏差e(t)绝对值与时间乘积的积分最小,由此得到系统PID 控制模型传递函数为:

确定离散采样周期T = 0.01s,同时依据仿真分析,选取比例系数Kp= 0.06,将(3)式离散化得

依据式(4)即可建立PID 控制器的数学模型。
2.1.2 平方根控制方式模型
大角度伺服跟踪时,要求系统输出快速无超调。此时按时间最优控制思想,系统需以最大加速度启动、最大速度运动、最大加速度制动,就可以最短时间无超调地到达目标位置。无超调要求系统偏差为零时速度也变为零,设制动阶段系统最大加速度为am,角速度为ω(t),t0时刻到达目标位置,则系统偏差e(t)与角速度之间的关系为:

同时已知角速度ω(t)、最大加速度am和t0三者关系,可将(5)式化简得到:

已知伺服系统最大加速度为120°/s2,最大速度70°/s,即可建立平方根控制方式的数学模型。
伺服系统运行时对跟踪精度要求较高,各项指标通常选取密位作为描述单位,2π 弧度= 360° =6000 密位。选取15 密位作为PID 和平方根控制切换的临界偏差,将上述两种控制方式结合起来,即可建立伺服系统数字控制电路模型,如图2 所示。
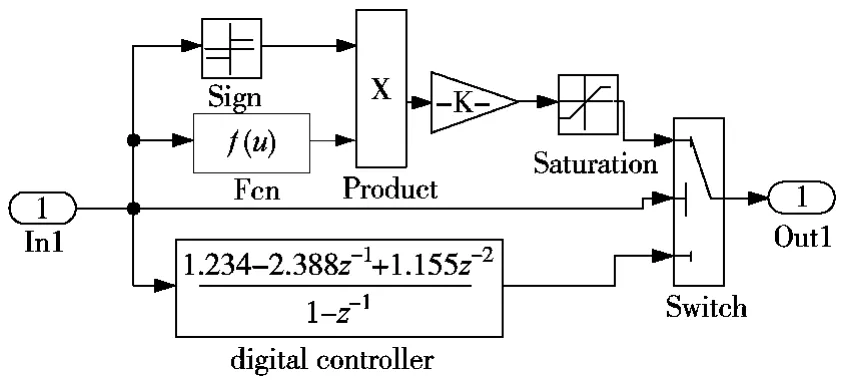
图2 数字控制电路仿真模型
2.2 伺服系统动力部分建模
伺服系统动力部分主要包括速度、电流调节器,功放电路、伺服电机及机械传动装置。该部分用于将数字控制电路输出的速度环主令信号比较、调节和放大,驱动执行电机带动负载运转,达到给定的目标位置。
2.2.1 速度、电流调节器模型
速度、电流调节器用于将速度或电路主令信号与相应反馈信号比较,生成后级单元的控制量,其实质为比较器,如图3 所示。速度调节器放大倍数为10.1,反馈系数为0.026;电流调节器放大倍数为11.5,反馈系数0.072。

图3 速度、电流调节器仿真模型
2.2.2 功放电路模型
功放电路由三极管放大电路与电机扩大机串联组成。三极管放大电路的数学模型可用放大倍数为5.8 的放大器近似表示。电机扩大机属于一种特殊的直流发电机,其原理与一般他励式直流发电机类似,只是在结构上通过附加补偿绕组、换相绕组、交轴助磁绕组等用以保证其输出电压与励磁信号的线性度。考虑上述附加绕组影响的情况下,电机扩大机的数学模型传递函数为:

其中K = 13,TK= 0.024,Tq= 0.048,整理后由于分母二次项系数很小,可忽略不计,得到传递函数:
2.2.3 伺服电机模型
本系统伺服电机为他励式直流电动机,可将功放电路输出的电信号转换为自身转轴上的角位移或角速度信号进行输出。其主要参数有:额定功率PN=6kW,额定转速nN= 3000r/min,额定电流IN= 35A,额定电压UN= 200V,电枢电阻Ra= 0.21Ω,额定转矩TN= 22.4N·m。建模时忽略电机电枢回路电感影响,得到伺服电机模型如图4 所示。
2.2.4 机械传动装置模型
伺服电机模型输出量为角速度ω,单位rad·s-1。考虑电机转轴到负载的传动比200:1,并加入有关单位换算,将角速度转换为机械传动装置的输出量角位移θ,可得传递函数[8]:
3 伺服系统仿真分析
3.1 仿真方法
将之前建立的数字控制电路与动力部分模型相连接,并加入必要的给定、反馈、机械扰动等信号,即得到伺服系统仿真模型[9],如图5 所示。为了研究伺服系统的快速性、跟踪性能等参数,可确定采用阶跃、等速与正弦三种信号作为系统的位置给定量[10]。其中,阶跃信号可测试系统快速反应能力,等速信号可测试系统稳定跟踪能力。上述给定信号在运行期间仅有部分加速、减速过程,对于跟踪加速度等动态参数无法进行有效的仿真测试,而当给定位移量按正弦规律变化时,伺服系统位移、速度、加速度均可连续变化,可弥补阶跃/ 定位信号的不足。
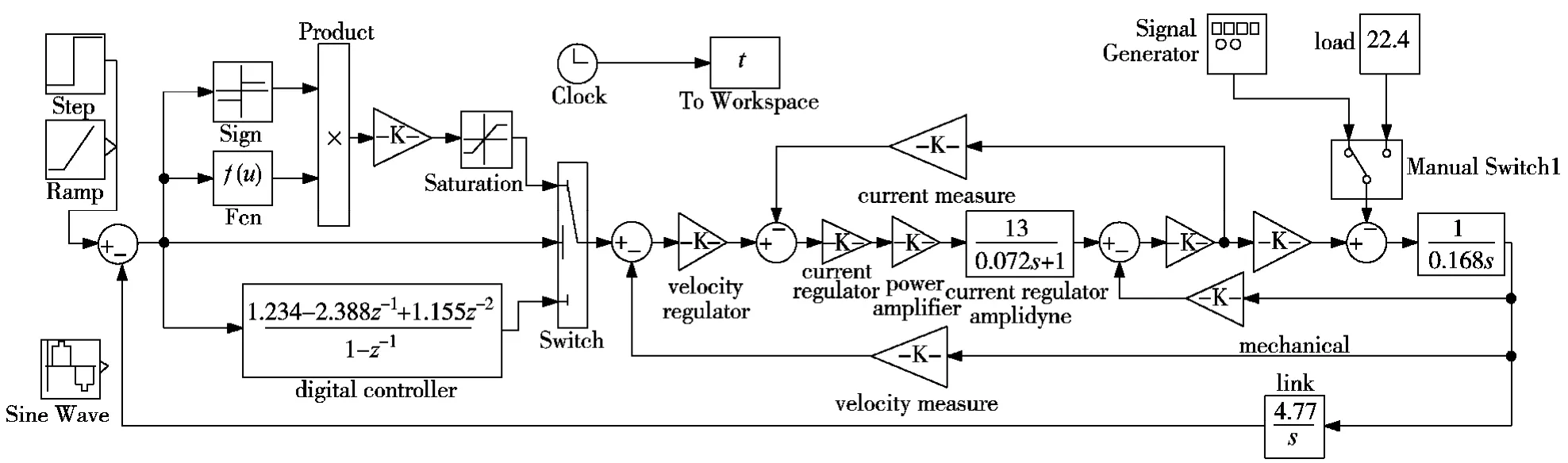
图5 伺服系统仿真模型
3.2 结果分析
为了验证仿真模型是否能够较好地模拟伺服系统的运行状态,在实际系统的位移、速度反馈环节加入传感器和采集电路,选取阶跃、正弦两信号作为控制主令,对实际系统的运行参数进行采集并与仿真结果比较,具体结果如下。
3.2.1 阶跃主令信号响应
伺服系统产品规定的快速反应特性如下:完成1000 密位的调转,其调转时间tdz<2s、超调量σ <25密位、静态误差σj<1 密位。实际系统进行了3 次1000 密位调转运行,通过对采集数据分析得到参数如表1 所示。由于静态误差很大程度受到机械空回误差影响且不便测量,因此未给出该项参数。

表1 1000 密位阶跃主令实测运行参数
仿真运行时,利用阶跃信号发生器模拟伺服主控计算机给出角位移θ = 1000 密位的定位主令,仿真时间设置为2s,得到图6 所示的伺服系统输出角位移随时间变化的曲线。将曲线局部放大可得运行参数如下:调转时间tdz=1.143s,最大峰值时间tm=1.067s,超调量σ = 12.1 密位,静态误差σj= 0.893 密位。
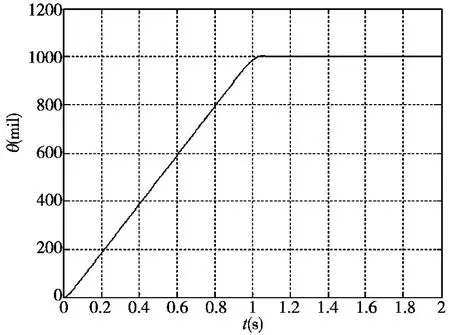
图6 1000 密位阶跃主令信号角位移θ 响应曲线
3.2.2 正弦主令信号响应
伺服系统规定的正弦跟踪特性如下:最大跟踪加速度azmax>1400 密位/s2,且该加速度下的跟踪误差δzmax<5 密位。实测正弦主令信号选择参数为振幅1500 密位,周期6.25s,开机待系统稳定后采集分析得到结果如表2 所示。由于选择信号加速度大于性能指标规定数值,且系统惯性大,电路干扰和温漂等影响,个别误差数据超出规定要求,但超出数值较小,并且通过后期维修和反馈参数调整后可恢复到正常范围。

表2 正弦主令实测运行参数
仿真系统运行时,由正弦信号发生器模拟主控计算机给出相同参数的正弦主令信号,仿真时间设置为15s,得到图7 所示的角位移θ 随时间变化的曲线以及图8 所示的正弦跟踪误差δz响应曲线。由曲线可知正弦主令信号跟踪时,最大跟踪误差为δzmax=-3.785 密位,伺服系统本次仿真的最大跟踪加速度azmax= 1513.42 密位/s2。
图7 正弦跟踪角位移θ 响应曲线
图8 正弦跟踪误差曲线
将两种主令下的实测结果与仿真结果比较后可发现,实际伺服系统在运行期间的性能参数要略低于仿真系统,其中的时间参数、跟踪加速度参数的实测值与仿真结果相差不大,验证了仿真系统的良好性能。超调量和跟踪误差参数实测与仿真有一定差距,这是由于实际系统惯性大,运行环境复杂,控制环节易受干扰,加上机械加工、装配工艺的等因素的影响,采集参数必然与理想值有一定差距,后期可以通过将上述随机因素模型化融入仿真的方式的进行完善。综合来看,仿真系统能够在误差允许的范围内反应实际伺服系统的运行特性,为系统动、静态性能改进,参数调试和故障检测等工作提供了便利。
4 结论
本文针对某数字直流伺服系统的生产调试与配套测试设备的开发需求,对系统原理与控制规律进行了分析研究。在此基础上建立了基于MATLAB/Simulink 仿真平台的伺服系统分析模型,并对主要动态性能参数进行了仿真研究,完成了仿真与实测数据的对比分析,验证了仿真模型的良好性能。目前,已利用该仿真模型,针对实际伺服系统的数字控制单元进行了软件参数的进一步优化和整定,同时该模型也为维修后的伺服系统反馈参数调整和检测设备开发提供了依据,大大提高了维修保障工作的效率,达到了预期目的。
[1]张思弟,饶华球,李宏胜. 伺服系统性能测试系统的开发研究[J]. 制造技术与机床,2005(3):62-64.
[2]赵霞,等. 某防空武器系统综合电气系统构造与原理(第1 版)[M]. 石家庄:军械工程学院,2009.
[3]孙世宇. 火控计算机和火炮随动系统(第1 版)[M]. 石家庄:军械工程学院出版社,1999.
[4]熊博. 自适应PID 控制在火炮随动系统中的应用[J].机电工程技术,2010,39(1):63-65.
[5]刘金琨. 先进PID 控制及其MATLAB 仿真(第1 版)[M]. 北京:电子工业出版社,2003.
[6]王小军,马保慧,李博,等. 高阶无静差数字伺服系统的ITAE性能指标最优控制[J]. 电气传动自动化,2011,33(3):17-21.
[7]耿爱辉,陈卉,陈娟,等. 数字随动系统的动态高型控制[J]. 长春工业大学学报,2007,28(3):261-263.
[8]黄振全,王锡荣,何云. 某型高炮电液随动系统仿真分析[J]. 机床与液压,2007,35(11):143-145.
[9]魏胜. 数控机床伺服系统原理分析与性能调整[J]. 组合机床与自动化加工技术,2010(5):81-85.
[10]蒋乐涛. 某型数字化随动系统分析及调测系统设计[D]. 南京:南京理工大学,2008.