超磁致伸缩致动器的基于RBF 神经网络整定PID 控制
2013-12-23王丽梅董桉吉
王丽梅,董桉吉
(沈阳工业大学 电气工程学院,沈阳 110870)
0 引言
超磁致伸缩材料(GMM)在磁场作用下产生磁致伸缩效应,具有磁致伸缩系数大、响应速度快、磁-机械耦合系数大、输出力大和能力密度大等优点,可实现准确定位、提高输出功率,在精密工程领域具有独特的应用前景。
然而在实际应用中,致动器的输入电流与输出位移呈现显著的非线性以及材料固有特性决定的滞回性[1]。为了消除这些非线性因素给定位系统带来的影响,利用神经网络的非线性映射能力与自学习优点,在线设计了一个神经网络PID 控制器对致动器的磁滞进行补偿。要进行较为精准的补偿和控制,选择合适的磁滞模型是必要的。Restorff 和Clark等首先根据铁质物质的现象学磁滞模型提出了超磁致伸缩材料的Preisach 磁滞模型,该模型非线性预测能力强、通用性好,缺点是只反映输入输出间的特性[2]。Calkins 等采用Jiles-Atherton 模型和二次畴转磁致伸缩模型,建立了超磁致伸缩致动器的物理磁滞模型,该模型为低阶微分方程,物理思想清晰、计算量少,在应用中容易实现[3]。对致动器的位移定位控制主要有:PID 控制是工业控制中应用最广泛的一种基本控制规律,虽然也能减少致动器的磁滞,但其控制效果不理想,而且调整参数使其满足要求往往需要丰富的经验和反复的尝试,工作量大却未必能达到目的[4];对致动器实施自适应滑模变结构控制,趋近滑模面,减小抖阵,但对于高频情况,对定位影响较大[5];利用Jiles-Atherton 的反向运动时磁化强度变化与磁场强度变化的对于关系,给定反向起始点迭代初值,实现磁滞补偿的方法,但需要致动器的精确模型与磁滞环的宽度[6];在迭代补偿的基础上设计了重复控制补偿器,这种基于复合前馈补偿的PID 控制方法提高GMA 精度,避免直接求求Preisach 逆模型,高频下建模精度受影响大[7]。
本文基于Jiles-Atherton 磁滞模型,依据GMM 材料的非线性压磁方程、致动器的结构力学原理,建立超磁致伸缩致动器的动态模型[8]。运用RBF 神经网络PID 整定原理,设计了增量式PID 控制器,加快了神经网络系统的学习速度并对致动器进行有效补偿,有效抑制扰动对系统的影响。
1 致动器系统的动态模型
1.1 超磁致伸缩系统的磁滞非线性动态模型
基于Jiles-Atherton 模型,分五步建立外加磁场H与磁化强度M 的关系:①确定材料的有效磁场He;②依据Boltzman,确定无磁滞磁化强度Man(Man是磁畴转动产生的,是完全可逆的);③确定畴壁位移产生的不可逆磁化强度Mirr;④确定畴壁弯曲产生的可逆磁化强度Mrev;⑤总磁化强度M 为Mirr和Mrev之和。具体表达式如下:
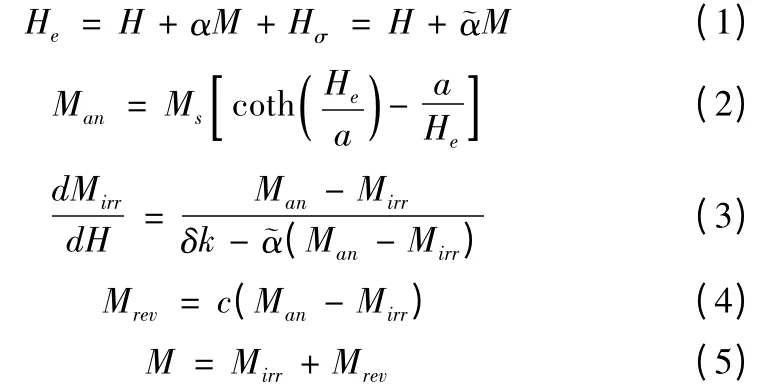
式中,H 为外加磁场,其值为激励线圈上通入的电流I产生的驱动磁场Hd= nI(n 为单位线圈长度的匝数)和永磁铁产生的偏置磁场Hb之和;αM 为材料磁畴间相互作用产生的磁场;Hσ为预应力σ0引发的磁场,其计算式为Hσ= 9λsσ0M (2μ0Ms2)。参数α~ ≡α +9λsσ0(2μ0Ms2);μ0为真空中的磁导率,μ0= 4π ×10-7H/m;当H 减少时,参数δ ≡-1。α、a、k、c 和Ms分别为畴壁相互作用系数、无磁滞磁化强度形状系数、可逆系数和饱和磁化强度。
在一定应力作用下,各向同性材料的磁致伸缩λ与磁化强度M 的近似关系为基于能量基础的二次畴转模型:

式中,M 和Ms定义同上,λs为饱和磁致伸缩。
1.2 致动器的动力学模型
致动器建模的关键是建立超磁致伸缩棒的数学模型,其目标是建立输入电流和输出位移之间的关系。为实现对超磁致伸缩致动器的动力学模型,作如下假设:①Terfenol-D 棒和线圈同长,棒内部磁场强度H、磁感应强度B、应变ε 和应力σ 均匀,棒输出位移y = εlr,输出力F = σA,lr、Ar分别为Terfenol-D 棒的长度、横截面积;②超磁致伸缩致动器在长度方向上认为单自由度的分离元件弹簧、阻尼器、质量组成;③考虑施压连接刚度,认为负载是一个质量——弹簧——阻尼负载;④在整个过程中,Terfenol-D 棒一段位移为0,另一端始终与负载有相同的位移y、速度和加速度¨y;⑤永久磁铁与弹簧线圈等效成与负载并联的形式,并且与负载的移动一致[9]。基于上述假设,图1 是将致动器的动力学过程简化为等效单自由度力学模型。

图1 致动器的等效力学模型
其中N、ls、I 分别为激励线圈匝数、长度、和输入电流;d、lr、ρ、Ar、CD则分别为Terfenol-D 棒的直径、长度、质量密度、内部阻尼系数,Kr、Cr、Mr分别为D 棒的等效阻尼刚度系数、等效阻尼系数、等效质量;Kl、Cl、Ml分别为等效刚度系数、等效阻尼系数、等效质量;Mt、Kt、Ct分别为致动器的永久磁铁与线圈等效的质量、等效的刚度系数、等效的阻尼系数;Ks为负载与Mt等效作用系数,取值大小为10。F、y、σ0分别为Terfenol-D 棒的输出力、位移和受到的预应力,Fl为负载对Terfenol-D 棒的作用力。
考虑Terfenol-D 棒质量与阻尼方程可写为:

基于第四个假设,可知负载对Terfenol-D 的作用力为Fl= (Ml¨y + Cl+ Kly)+ (KsMt¨y + KsCt+KsKty),根据牛顿第二定律,则Terfenol-D 棒的输出力F = - Fl,即:


其中:

对(9)式进行拉式变换,得到致动器的输出位移:

其中s 为Laplace 算子。
根据Jiles-Atherton 模型式(1)~(5)、二次畴转磁致伸缩模型(6)式、位移动态模型(11)式,得到致动器的磁滞非线性动态模型。应用此模型,可以求出在外加磁场H = Hb+Hd作用下,致动器的输出位移。外加磁场H 为激励线圈上通入的电流产生的驱动磁场和偏置线圈产生的磁场之和,可以确定致动器的输入电流与输出位移的关系。
2 RBF 神经网络整定PID 控制致动器
2.1 控制系统的结构图
神经网络控制器通过对传统控制器输出进行学习,在线调整网络的权值,使输出能够跟踪给定的输入。其中GMA 是驱动机构,yd是给定的参考输入信号,u 是GMA 输入电流,y 是GMA 输出位移,ym是神经网络的输出,e 为参考输入信号与GMA 输出位移的偏差,em是y 与ym的偏差,见图2。
2.2 RBF 神经网络整定的PID 控制
RBF 网络结构简单(图3),是最优的非线性函数逼近器,是一种具有单隐含层的三层前向网络,包含输入层、单隐层和输出层。输入层只起信号传输作用,从输入层到隐含层的网络权值固定为1,隐层节点的激活函数采用高斯径向基函数;由输入到输出的映射是非线性的,而隐含层空间到输出空间的映射是线性的,从而大大加快了学习速度并避免局部极小问题。
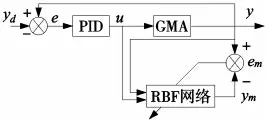
图2 RBF 网络整定PID 控制框图

图3 RBF 神经网络结构
在RBF 网络结构中,x =[x1,x2,…,xn]T为网络的输入向量。设RBF 网络的径向基向量h = [h1,h2,…,hm]T,其中hj为高斯基函数:

其中网络的第j 个节点的中心矢量为Cj= [cj1,cj2…cji…cjn]T,i = 1,2,…,n。
设网络的基宽向量为:

bj为节点j 的基宽度参数,且为大于零的数。网络的权向量为:

辨识的网络输出为:

取RBF 网络逼近的性能指标为:

根据梯度下降法,输出权、节点中心及节点中心矢量的迭代算法如下:
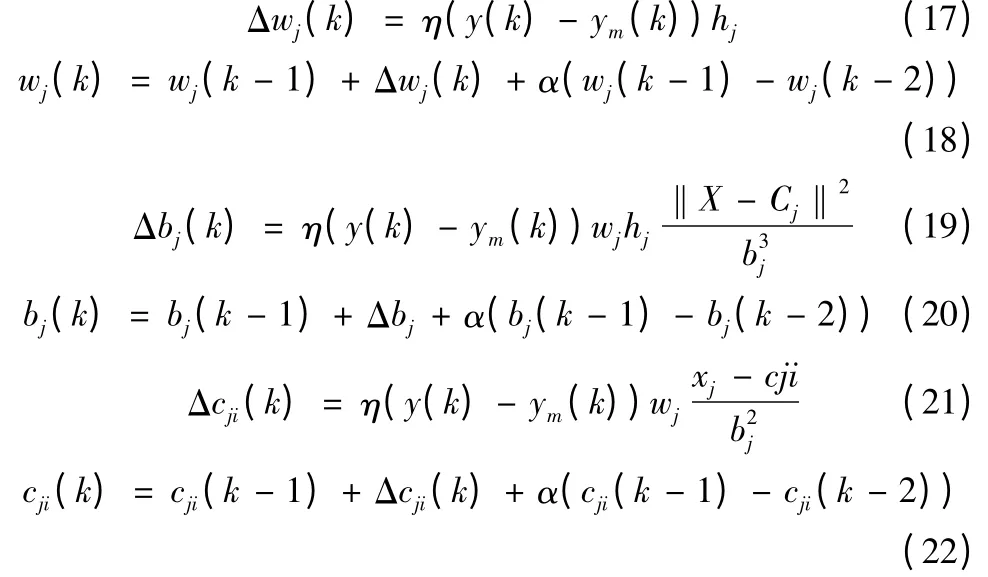
上式中,η 为学习速率,α 为动量因子。
对象的输出对控制输入变化的灵敏度信息的算法为:

其中x1= Δu(k)。
采用增量式PID 控制器,控制误差为:

PID 三项输入为:
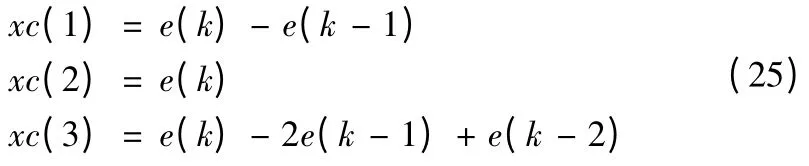
控制算法为:

神经网络整定指标为:

kp,ki,kd的调整采用梯度下降法:

3 仿真结果及分析
根据建立的致动器的磁滞模型和动力学模型,结合输入电流与输出位移的关系,根据文献[10]给出的数据进行仿真实验:在预应力σ0= - 6.69 ×106N/m2,交流频率1Hz 时,Ms= 7.65 ×105A/m,a =7012A/m,k = 3283A/m,α = 0.032,c = 0.18。Terfenol-D 棒的d = 12.7mm,lr= 115mm;激励线圈N = 1200 匝;负载Ml= 0.5kg,= 3 ×1010N/m2。Mr= 0.045kg,kr= 3 × 107N/m,Cr= 3.307 ×103Ns/m,弹簧的刚度系数kl= 5.67 × 105Ns/m,CD= 3 ×106Ns/m2,阻尼系数Cl= 1 ×103Ns/m。选取参数η = 0.65,α = 0.057,cji=[0 0.02 0.01 0 0.01 0;0 0 0.01 0 0.01 0.02;0 0 0 0 0 0.01],bj= [1 1 1 1 1 1]T。
当输入电流I = sin(2πt)时,图4 是致动器输出的位移曲线,从图4 中可以看出当电流为0 时,其位移并不是0,存在着明显的磁滞。
针对致动器存在的磁滞,运用RBF 神经网络PID整定理论设计控制器,给定系统的参考输入yd为50μm,使输出跟踪参考输入。
为了验证PID 整定的致动器的优越性,取输入信号为1A,则输入X = [1,y],网络的初始权值取随机值。

图4 GMA 输出位移曲线(输入为正弦信号)
图5 和图6 分别表示未加入RBF 神经网络PID整定与加入RBF 神经网络PID 整定的系统响应曲线,实线代表给定输入曲线,虚线代表系统输出曲线即跟踪曲线。当给系统分别加入相同的扰动后,可以明显地看出:图5 中的跟踪曲线在0.1s前有明显的超调,大约在0.35s时与给定输入曲线重合;图6 中系统的输出在0.1s 前可以较快的跟踪致动器的输入,跟踪效果好,超调量较小,经RBF 整定的PID 控制有效地对致动器的磁滞进行补偿,而且根据式(29)可以自整定最优参数值。
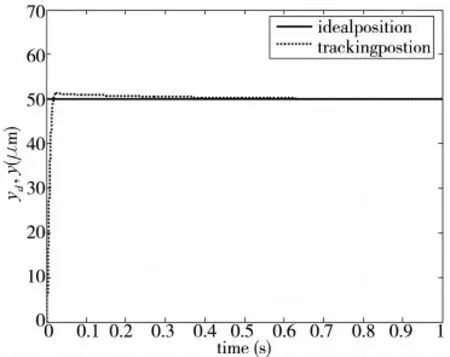
图5 未整定的PID控制响应

图6 RBF 整定PID控制响应
若考虑Terfenol-D 棒振动对致动器带来的干扰影响G,则致动器的输出变为:

为验证RBF 整定PID 控制的抗干扰能力,在仿真t = 0.1s 时(G = 100N)对两种控制方式加入干扰。图7 是未加入整定的PID 控制方式下加入干扰时的仿真曲线,0.1s 后曲线经大约0.5s 的时间跟踪到输入信号;图8 是加入整定的PID 控制方式下加入干扰后的仿真曲线,0.1s 加入干扰后可快速自调整,抑制干扰能力明显提高。

图7 在PID 控制下有干扰的响应
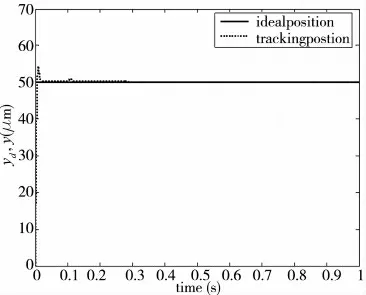
图8 RBF 整定下有干扰的响应
为进一步试验所设计的控制器对位移的控制效果,输入位移r = 35 +25sin(2πt)μm。
图9 中实线轨迹为输入的参考位移,虚线轨迹为增加前馈补偿控制器后的输出位移,可以看到致动器的输出能够跟踪给定的输入,达到了控制目的,从而实现了位移的精密定位控制。

图9 输入与输出信号跟踪
4 结束语
本文通过建立超磁致伸缩致动器的Jiles-Atherton 磁滞模型和系统动力学模型,设计了基于RBF 神经网络整定的PID 控制器,实现了对致动器输出的补偿控制,提高了输出对参考输入的位移跟踪速度,而且RBF 神经网络整定的PID 三个参数能够自整定,且该控制方法能够兼顾跟踪能力和抑制干扰能力,有效减小了磁滞非线性的影响,控制效果理想。
[1]孙乐. 超磁致伸缩材料的本构理论研究[D]. 兰州:兰州大学,2007.
[2]Restorff,J.B.,Savage,H.T.,Clark,A.E.Preisach modeling of hysteresis inTerfenol[J]. Journal of Applied Physics,1990,67(9):5016-5018.
[3]Calkins,F. T. Smith,R. C. Flatau,A. B. Energy-Based Hysteresis Model for Magnetostrictive Transducers[J].IEEE Transactions on Magnetics.2000,36(5):429-439.
[4]刘金琨. 智能控制[M]. 北京:电子工业出版社,2005.
[5]贾振元,王晓煜,王福吉. 超磁致伸缩执行器自适应离散滑模控制[J]. 系统仿真学报,2007,19(24):5768-5777.
[6]李欣欣,王文,陈子辰,等. Jiles-atherton 模型的超磁致伸缩驱动器的磁滞补偿控制[J]. 光学精密工程,2007,15(10):1558-1563.
[7]龚大成,吕福在,唐志峰,等. 复合前馈补偿的超磁致伸缩执行器精密伺服控制[J]. 光学精密工程,2007,15(10):1589-1595.
[8]F.Braghin,S.Cinquemani* ,F.Resta. A model of magnetostrictive actuators for active vibration control. Sensors and Actuators A 165(2011):342-350.
[9]王湘江,王兴松. 超磁致伸缩驱动器建模及其迟滞补偿[J]. 仪器仪表学报,2007,28(5):813-819.
[10]Calkins F T,Smith R C,Flatau A B. Energy-based Hysteresis model for magnetostrictive transducers[J]. IEEE Transactions on magnetics. 2000,36(2):429-439.
