电子称重系统水平度自补偿方法的实现
2013-12-14马凯丽宋辉
马凯丽,宋辉
(曲阜师范大学 电气信息与自动化学院,山东 日照 276826)
0 引言
电子秤由于其结构以及重力等原因必须工作在水平面上,故使用时要将其放在平坦稳固的台面上,使用时一般均需通过调节其引脚才能使其工作在水平面,为此一些精度较高的电子秤重系统还安有水平仪,通过观察水平仪内部气泡来进一步精确调整机器从而使其工作在水平面上。但在使用过程中,由于使用者的疏忽、环境的变化、以及人们的视觉误差等,会造成调节次数的增多以及电子秤工作水平面的偏移,影响计量的准确性以及电子秤的使用寿命,进一步将影响交易双方在交易中的公平性[1-2]。MMA745加速度传感器可通过测量三轴的加速度,通过一定的转换得出水平面的倾斜角度,与此可以得出一种解决使电子秤重系统工作平面的新方案。
1 电子秤工作面倾斜对称量结果的影响
应变称重传感器所称物体的质量M与其垂直方向上所受的力G的大小相对应。如图1(a)中所示,当电子秤的工作面水平时,其测量值Fn=G;工作在非水平面上如图1(b)所示,物体所受重力G分解为垂直于工作平面的对称重传感器的压力Fn1和平行于工作平面的力Fn2,Fn1和Fn2均小于G。压力Fn1垂直作用于称重传感器,是称重传感器设计的受力方向,也即电子秤的输出值。在允许的范围内由此方向施力于称重传感器,电桥输出具有良好的线性。力Fn2平行于称重传感器 根据系统倾斜方向的不同会使称重传感器发生整体拉伸、压缩或扭曲变形,影响电桥输出非线性而导致测量误差。由于称重结构原因在这个方向受力发生变形的敏感程度远低于垂直方向,尤其是当倾斜角度以及G都很小时,G在Fn2方向的分量Gsinα更是微乎其微,甚至可以忽略,所以物体的真实重量可以通过Fn1以及α的值求得:G=Fn1/cosα,其中,Fn1为电子秤所称物体的数值,而物体的实际重量为G,电子秤工作水平面的倾角为 α[3-4]。
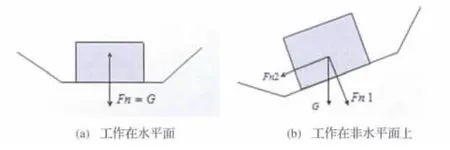
图1 物体在水平面和非水平面的受力情况
2 系统总体的方案设计
在现有实验台(浙江高连的CSY-2000系列传感器与检测技术实验台)电子秤的基础上添加一个AD转换模块、MMA7455三轴加速度模块,在单片机的控制下加以改进的。首先利用应变式电子秤测出物体的质量m,然后将其通过AD转换,转换为数字量d,与此同时通过 MMA7455将电子秤工作水平面的倾角 α测出,通过公式D=d/cosα得出物体真实重量所对应的数字量D的值,然后通过相应的函数将数字量值变换与之对应的物体真是重量值 D1,然后由数码管显示出来,从而得出物体真实的重量M。
2.1 系统的硬件组成部分
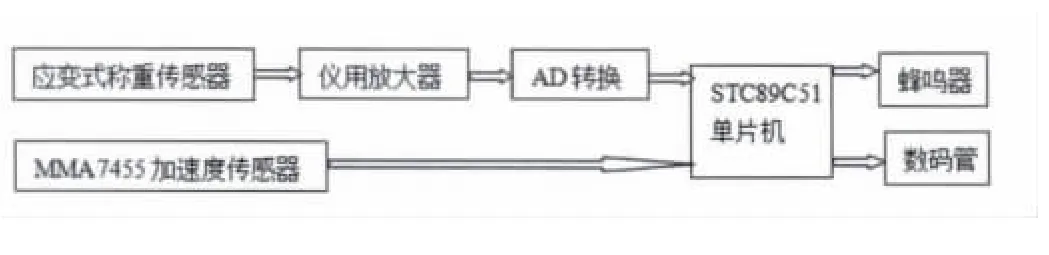
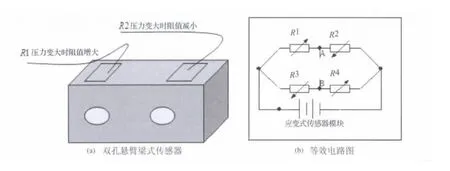
图2 称重装置的结构及工作原理图
系统的硬件结构如图2(a),应变式称重传感器用于测量不同工作平面上的物体质量,MMA7455加速度传感器用于倾角测量。就结构图分别介绍各部分作用。
应变式称重传感器,采用图2(a)所示的双孔梁式称重传感器,等效电路图如图2(b)所示,具有如下基本特点:(1)同样载荷情况下梁的应变量和电桥的输出电压是个常量且与载荷在秤盘的位置无关;(2)梁的应变量和电桥的输出电压与载荷成正比。虽然载荷在秤盘的位置和称重结果关系不大,但四角的水平度对测量结果的影响很大所以应测出电子秤工作平面的倾角[5]。
仪用放大器的工作原理图如图3所示。由传感器的A、B端输出的物体质量的测量值一般为毫伏级,不能用于直接用于A/D转换需要将其进行放大,因此,采用上图所示的仪用放大器,其放大倍数为 VIN0=[-R16/R14+R16(R10+R12)(Va-VB)/RW3R14]*(1+R18/R16)可以通过调节RW3的值进行调节,将毫伏级电压转换为0~5 V,而每个放大器的放大倍数并不是无限制的,最大取决于供电电压的大小,在实验室中,该电路的供电电压是有限的,因此其放大倍数也是有限的,我们需采取多级放大。放大结束后将输出信号输入到A/D转换的IN0引脚。
MMA7455[4-5]是一款数字输出(I2C/SPI)、低功耗、紧凑型电容式微机械加速度计,测量原理如下:如图4(a)所示,当电子秤工作面水平时,Z轴的大小即为物体所受重力加速度g的大小,当电子秤的工作面不水平即如图4(b)所示时,AX=gsinα,AY=gsinβ,AZ=gsinγ;其中,AX、AY、AZ表示在 X、Y、Z 轴上的重力加速度输出,α、β、γ 表示倾斜后与X、Y、Z坐标的倾斜角度,g为重力加速度。
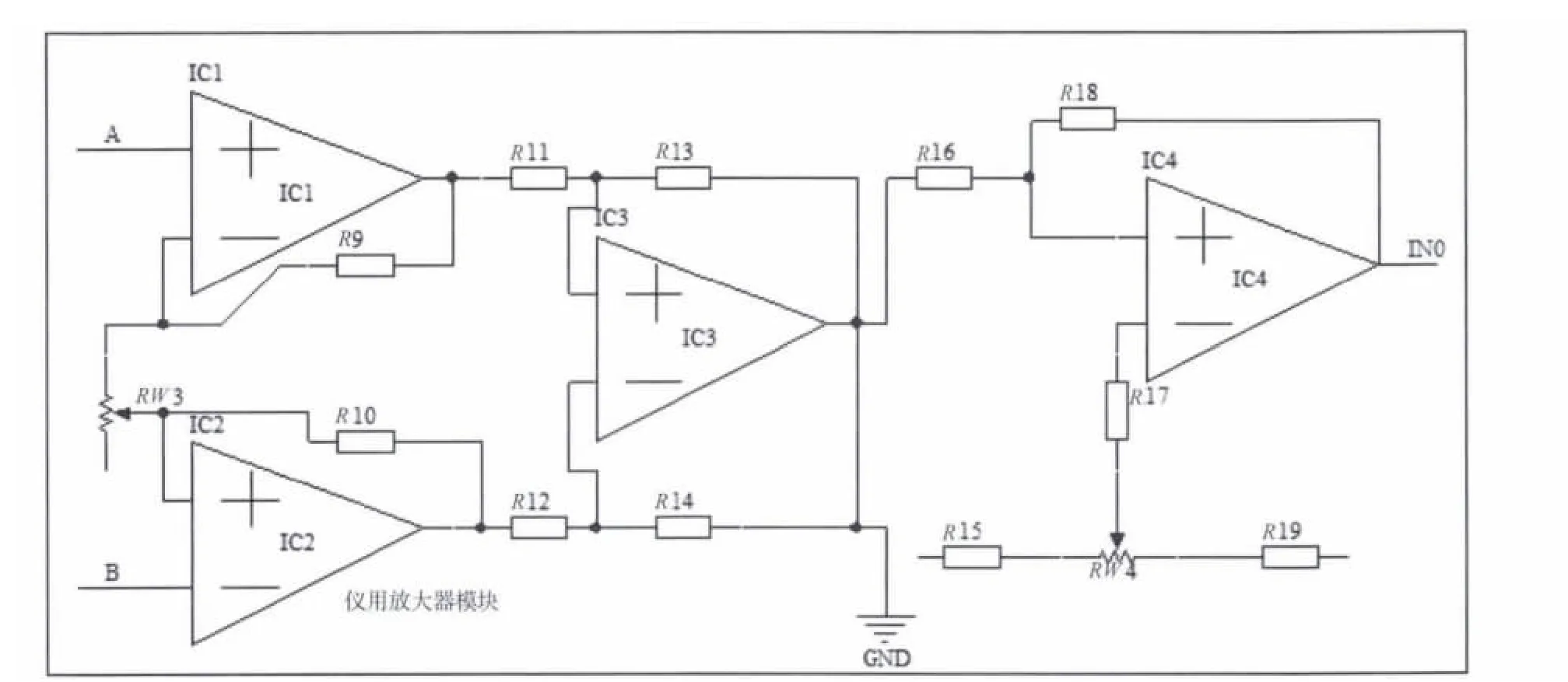
图3 仪用放大器工作原理图
从而α=arcsin(AX/g),β =arcsin(AY/g),γ =arcsin(AZ/g),;由图 4 分析可知:当电子秤绕X轴转动一定角度时,G=m(AZcosγ ±AYsinβ);当电子秤绕 Y 轴转动一定角度时,G=m(AZcosγ ±AXsinα);θ=f(α,β,γ);当电子秤倾斜角度较小,即 cosθ≫sinθ时,G也即 cosθ的大小主要取决于 γ 的大小[6]。
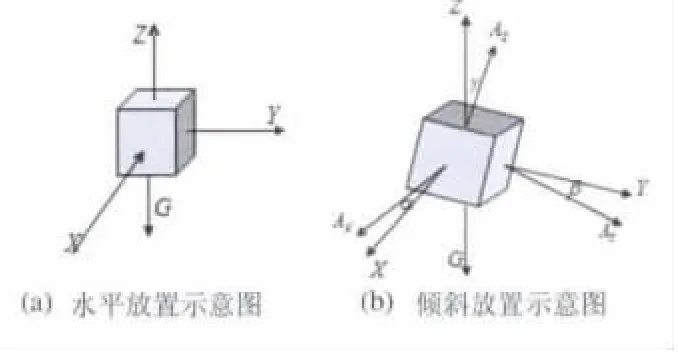
图4 MMA7455角度测量的原理图
2.2 系统的软件部分
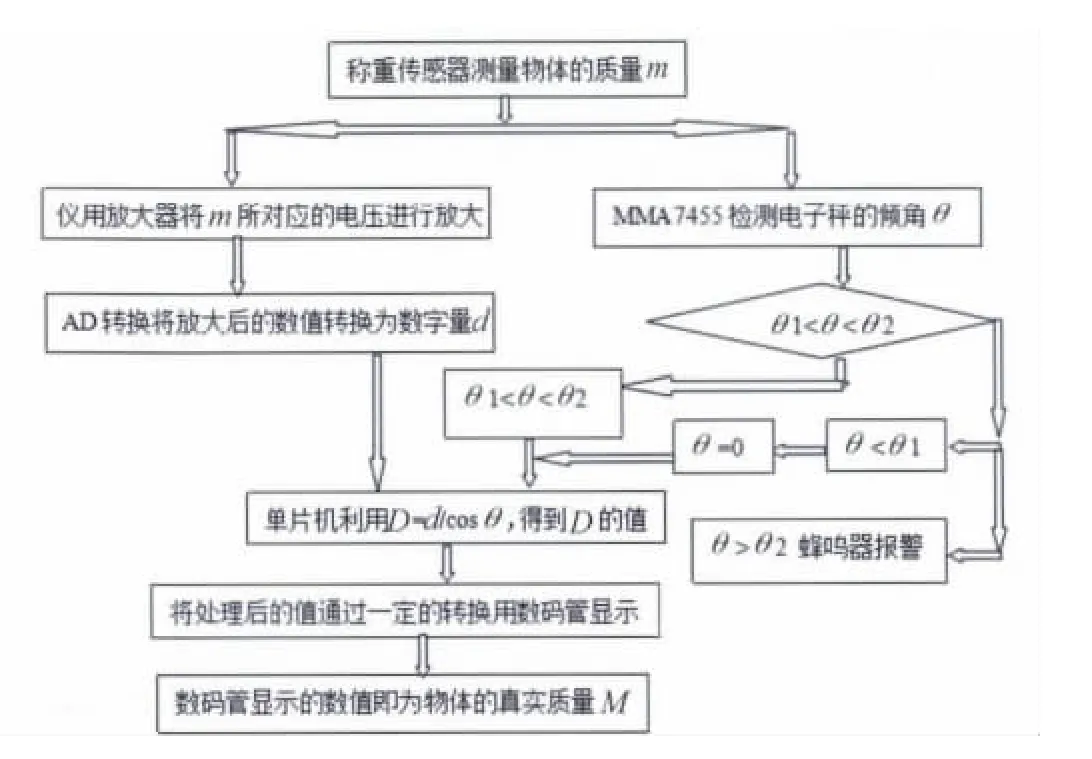
图5 系统的软件流程图
系统的软件流程如图5所示。首先用现有电子秤测出物体现有的质量m,然后通过改变仪用放大器电阻 RW3的值进行放大倍数的调整,从而将m所对应电压的大小转换为0~5 V,再通过AD转换将转换为单片机可接受的数字量d,同时,MMA7455完成对电子秤倾角θ的测量。当θ的值小于θ1时,其引起的误差较小不必进行补偿;当θ的值大于θ2时,人们就很容易看出电子秤的倾斜,该情况很容易进行避免,所以也不需进行专门的补偿,只要令蜂鸣器响几声作为对人们的提醒即可;当θ1<θ<θ2时,就要对称量结果采取专门的补偿处理措施,利用AD转换得到的数字量d与倾角θ通过公式D=d/cosθ进行处理,从而得到物体的真实重量所对应的数字量D,转换为真实质量M时所应对应的值后数码管输出显示。
3 实验结果与误差分析
表1给出了实验室实验台(浙江高连的CSY-2000系列传感器与检测技术实验台)基础上倾角补偿测量结果,并给出了不同倾角的补偿前后测量曲线与真实曲线差值的的仿真结果图如6所示。
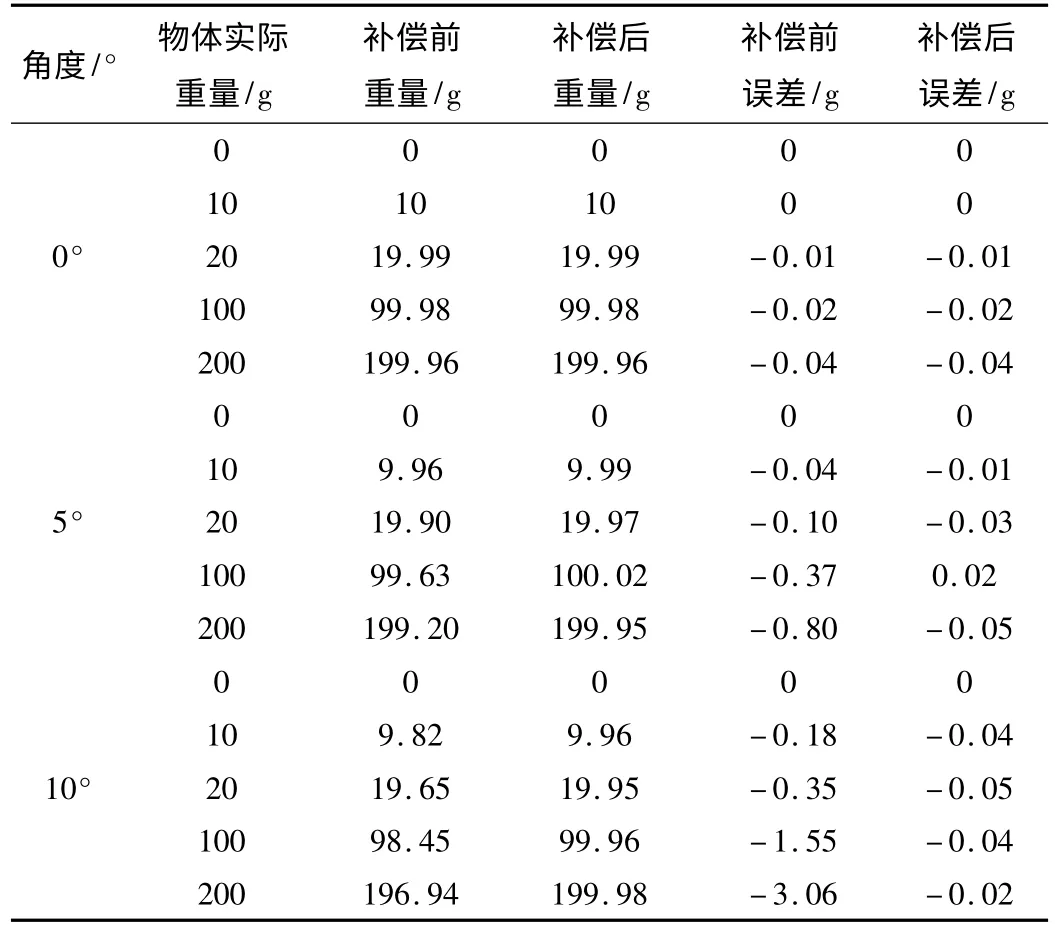
表1 不同倾角下补偿前后测量值
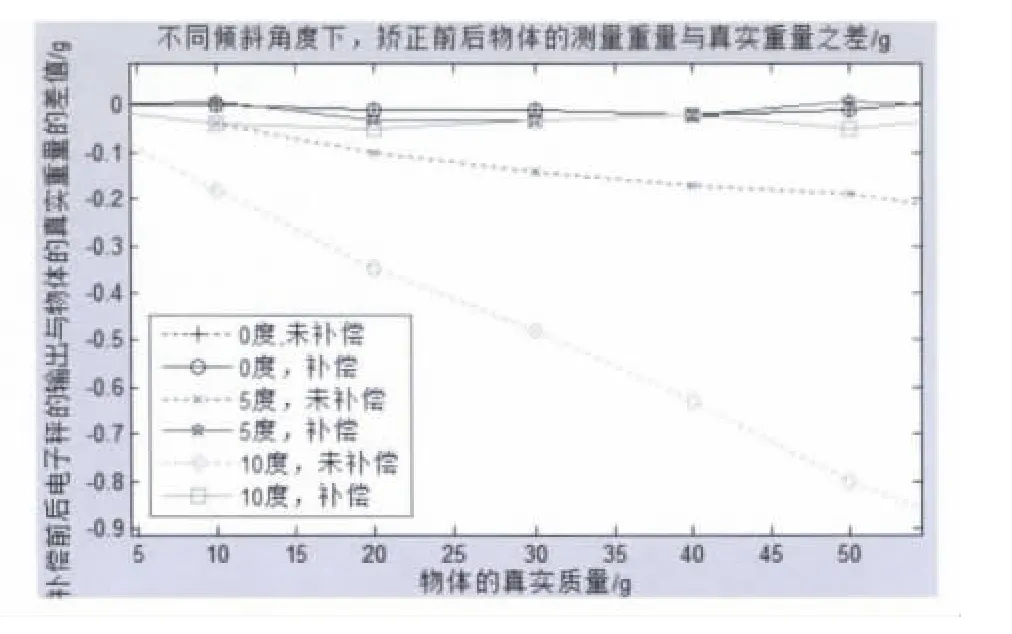
图6 对不同倾角的补偿前后测量曲线与真实曲线差值的的仿真
图6 中所描绘曲线为不同倾斜角度下,矫正前后电子秤的输出与物体的真实质量的差值。其中:“+”虚线表示角度为0°未矫正时的输出误差;“ⅹ”虚线为倾角为5°未矫正时的输出误差;“◇”虚线为倾角为10o未矫正时的输出误差;“〇”细实线为倾角0°矫正后的输出误差;“☆”细实线为倾角5°矫正后的输出误差;“□”细实线为倾角10°矫正后的输出误差。由图明显可以看出,矫正后电子秤的输出更加接近物体的真实质量。表2给出了国家标准二级秤标准,对比看出该电子秤满足国家标准二级秤标准,而且补偿后的数值比补偿前的更加精确,更加接近物体的真实重量,从而可以有效的减少交易的不公平性。
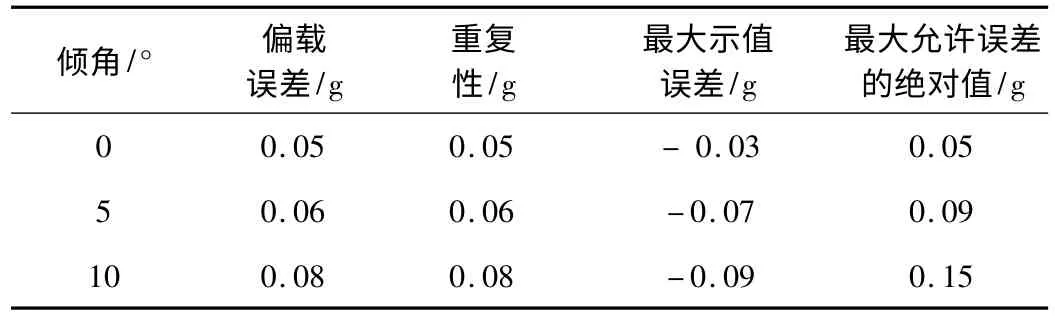
表2 电子称重系统国家标准二级秤标准
4 结束语
在分析倾角对电子秤系统称重结果的影响的基础上,设计了一种基于MMA7455三轴加速度传感器的电子秤水平度自补偿系统。利用MMA7455测出其工作面的倾斜度,经单片机算法处理,得到物体的真实重量,具有较好的补偿效果。从软硬件两方面介绍了系统的组成及各部分作用,基于改装过的实验室现有实验平台进行了数据测量并对结果进行了仿真。由实验数据的仿真结果可知,系统有效的补偿了电子秤水平工作面倾斜所引起的误差,达到了国家二级秤标准。
[1]从佩仁.浅谈电子秤的误差来源与解决方法[J].计量与测试技术,2008,35(6):45 -46.
[2]赵总社.关于电子秤的工作原理与应用[J].科技信息,2007,24(1):70.
[3]金建交,郑卜伟,郁峰,等.称重系统角度自动补偿方法研究[J].衡器,2008,37(2):18 -21.
[4]唐立军,滕召胜,陈良柱,等.电子秤倾角自动检测与称量误差补偿方法研究[J].电子测量与仪器学报,2011,25(1):61 -67.
[5]利用加速度传感器测量倾角[DB/OL].http://www.tilt-china.com.
[6]刘宁.半导体加速度传感器在电子秤重系统中的应用[J/OL].'飞思卡尔杯'第五届嵌入式处理器设计应用大奖赛论文[J/OL],2004(10).http://www.freescale.com.cn/mcu2004/chi/pdf/f10288.pdf