大型变频调速船用抓斗挖掘机的研制
2013-12-12谢勇谋吴大可肖奇斌宓祖田
曾 军,吴 斌,谢勇谋,吴大可,肖奇斌,宓祖田
(杭州杭重工程机械有限公司,浙江杭州 310004)
0 引言
船用抓斗挖掘机(又称为挖泥船)是水下开挖施工、水域工程外科手术式治理的主要设备。我国港口众多、内河航道长,特别是近年来国内航道疏浚、水利建设、港口建设等基础建设工程项目的广泛展开,对船用抓斗挖掘机,特别是大斗容量机型的需求与性能要求都日益提高。
由于技术瓶颈的限制与国外产品的价格壁垒,目前国内市场上大斗容量的船用挖掘机大多是从国外购买的二手设备,售后服务无法得到保证。此外,《国务院关于加快振兴装备制造业的若干意见》中明确提出要提高重大技术装备的自主化水平,国家的“十二五”规划中更是将高端装备制造也与海洋装备制造业列为重中之重。因此,本项目立足与自主创新,在借鉴与引进国外先进技术的同时,依靠杭州杭重工程机械有限公司(以下简称“公司”)与浙江大学现有的技术力量,对船用抓斗挖掘机的国产化进程中所面临的技术瓶颈进行技术攻关,依据“十二五”规划中对高端装备提出的高智能性、高可靠性与低能耗的指导原则,开发出符合我国具体施工工况的低成本、高性能船用抓斗挖掘机。
1 国内外情况
1.1 国内外研究现状和发展趋势
1)国内发展现状
我国的船用抓斗挖掘机生产起步较晚,从1954年抚顺挖掘机厂生产的第一台斗容量为1 m3的机械式单斗挖掘机至今,大体上经历了测绘仿制、自主研制开发和发展提高等三个阶段。通过多年施工实践的经验积累,我国正逐步掌握疏浚施工关键技术和国产部分型号的船用挖掘机,这是我国疏浚业进一步发展的基础。但是,国产船用挖掘机主要用于解决单一工程问题,大量工程属于初期治理、大规模和基础性建设,无法满足逐渐专业化、多元化、系统化、综合化的疏浚施工项目的要求。
目前市场上所拥有的大斗容量的船用挖掘机都是从国外进口的二手设备,且已使用多年,面临大修、报废,急待更新,同时由于缺少大修备件,二手设备购买使用性和性价比越来越低;此外,由于我国疏浚项目相对恶劣的施工环境所造成的与国外疏浚项目施工工况的显著差异,造成了国外船用挖掘机产品并不能充分发挥其性能优势。因此,市场急需国内的生产厂家来制造高性价比且适用于我国具体工况的大斗容量的船用挖掘机。公司通过长期的市场调研,探求到沿海港口和长江中下游聚集了众多的船用挖掘机用户,多数用户主要需求的抓斗容量为6 m³及以上的船用抓斗挖掘机,并对产品的价格、维护成本、挖掘性能及售后服务提出了较高要求。
2)国外产品现状与技术发展趋势
国内进口的船用抓斗挖掘机产品主要集中在日本四国建机和石川岛等企业,相对于国内产品采用电驱动形式,即传动形式为电机驱动,由船提供电源,由交流电动机驱动直流发电机,国外产品技术上主要采用双输出轴柴油机驱动,Ω离合器,再到变矩器、链传动、齿轮传动再到主、副卷扬来实现抓斗提升下降,同时柴油机另一端驱动发电机,再带动电动机实现机器平台回转、变幅等动作。目前,国外的产品正朝着高可靠性、高安全性、多工况适应性、高效节能与智能化方向发展。
2 市场需求分析
随着世界经济的发展,在全球物流持续增加、船舶日益大型化的趋势下,港口的港池和航道必须不断加深,同时港口数量也日益增加。
有关专家预测,未来十年间我国在沿海港口、航道建设与维护方面,沿海疏浚市场每年约有100~200亿元投资,主要包括大型枢纽港深水航道的建设和维护、用于建港和临江工业区建设的沿海大型陆域吹填项目以及港口航道的改造升级。
另外,中国疏浚治理具有较长的历史,但手段落后且规模较小,造成先前水利清淤疏浚欠债较多,进而致使河道和入海口淤塞严重,水患频繁,航道和港深相对于国际标准偏低,水库面积和库容萎缩普遍。数据显示,2002年前我国各大主要江河年清淤疏浚量为1.81亿立方米,2003~2010年年清淤疏浚量为2.71亿立方米,而目前国内船用挖掘机总的年清淤疏浚能力仅有约1亿立方米。目前,我国大量的清淤疏浚工作已提上议事日程,该工作已不仅在防洪建设中发挥着重要作用,同时对改善水环境、提高供水质量、美化城市和观光旅游等方面也有着重要作用。未来中国环保疏浚市场无疑将呈现高速增长态势,其市场潜力不可估量。基于上述情况预测,世界范围内的疏浚量将不断上升,对疏浚船舶特别是大容量的船用挖掘机的需求将不断增加。
3 项目主要研究开发内容、技术关键
3.1 项目主要研究内容
船用挖掘机的性能主要由工作装置、控制系统决定。其技术难点在于泥浆浓度、挖深、输泥距离等参数的确定、工作装置的切削性能和耐磨性以及综合监控能力。结合国内外船用挖掘机的发展趋势以及我国疏浚项目的具体工况要求,本项目研究的主要内容包括:
1)动力匹配与性能优化设计;
2)虚拟样机建模与动态特性仿真技术;
3)挖掘轨迹控制及综合监控研究。
3.2 项目关键技术
3.2.1 挖掘机动力匹配与性能优化设计
抓斗式挖泥船的型式较多,但其工作原理相同。本项目研究的挖泥船挖泥系统的特点主要有:
1)挖掘土质适应性强。可以配备各种不同类型的抓斗,如轻、中、重型抓斗,甚至可以配备超重型抓斗来适应不同土质的需要。在各种挖掘船中,抓斗式挖泥船适挖的土质的范围是最广的。
2)挖深适应性强。可以通过更换不同长度的抓斗钢丝绳来满足施工中不同挖掘深度的需要,最大挖深可达80 m。
3)抓斗机配起重吊钩或配碎石重锤,可兼作起重船或作水下岩石预处理的凿岩船使用,使船用挖掘机成为多用途工程船。
4)可作业于其它类型挖泥船不适应作业的水域。如狭小水域、港池、码头、大型厂矿企业专用航道、岸边以及防波堤等区域的施工。
因此,船用抓斗挖掘机是一种多功能的工程装备,所遇到的作业对象,即体质变化较大;此外,使用方式与要求也不同,有时强调能源经济性,而在狭小水域或港口工况下,则重视精度和安全。同时,根据不同的挖掘土质,所配备的抓斗型号也有所不同,在不同的水深情况下,抓斗钢丝绳的长度同样不同。因此,一般的在满足系统正常工作的前提下,应根据作用工况、抓斗结构参数和使用要求来对电源与电气传动进行优化设计,合理选择船用挖掘机系统各元件的参数,使之与工况向适应,工作时能够达到最佳的工作状态,以提高系统局部和整体效率,达到节能效果。
3.2.2 虚拟样机建模与动态特性仿真技术
船用抓斗挖掘机的传统的经验设计——物理样机——现场试验——样机修改的迭代设计过程由于其设计周期长、效率低且无法分析工作过程中的动力学特性而无法满足市场需求。此外,船用抓斗挖掘机是一个由动力装置、传动系统、转向系统、气动系统、工作装置、制动系统等多个子系统组成的刚体——柔性体耦合的机、电、气复杂系统,其各部件、总成以及施工工况决定了其整机性能,采用传统的力学分析方法很难甚至无法对其三维运动学和动力学进行求解(图1、图2所示)。因此需要将多体系统动力学理论与虚拟样机理论引入船用抓斗挖掘机的设计中来,解决其设计过程中关键的理论问题,建立起运动学、动力学与系统动态特性的数学模型。通过建立不同物理参数设计方案的虚拟样机模型,确定影响性能的敏感参数,并通过可视化技术,预测产品在真实工况下的特征与动态响应,以获得具有最优工作性能的设计方案,大大缩短产品的设计开发周期,提高产品的可靠性和性能指标。
3.2.3 挖掘轨迹控制及综合监控研究
抓斗式挖泥船轨迹控制的目标是使挖泥船的施工精度和质量得到明显的提高,通过对作业土体参数的在线识别,采用人工智能等技术手段,实现自动作业,降低操作者的劳动强度,提高工作效率。本项目研究抓斗式挖泥船抓斗施工作业流程以及挖泥船液压控制系统的工作原理,根据实际施工作业要求,对挖掘轨迹控制及其综合监控系统的硬件整体结构进行设计,并对系统中各个监控环节的工作原理以及系统各传感器件间的数据传输及通信方式进行研究。
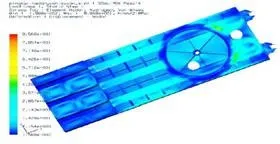
图2 平台整体位移云图
3.3 技术路线
3.3.1 三变频电机联合驱动的动力匹配技术
解决途径:船用抓斗挖掘机主要由回转支承、回转平台、动臂与变幅、抓斗提升与回转驱动装置、电气传动与控制系统、气动系统等组成。挖掘机的机械驱动分别由三台变频电机驱动,提升电机为一台400 kW的变频电机,由它来实现抓斗的开闭和升降。平台的回转由一台90kW的电机驱动,动臂的变幅由一台30 kW的电机驱动。
异步电机变频调速原理:异步电机的同步转速是由供给电机的电源频率决定,如8极电机50Hz时750转/分,10 Hz时为120转/分,80 Hz时为1200转/分,因此只要改变变频器输出频率就能对电机进行调速,变频调速异步电机输出机械特性如图3。
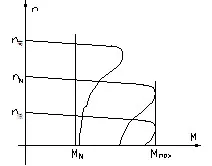
图3 变频调速异步电机输出机械特性图
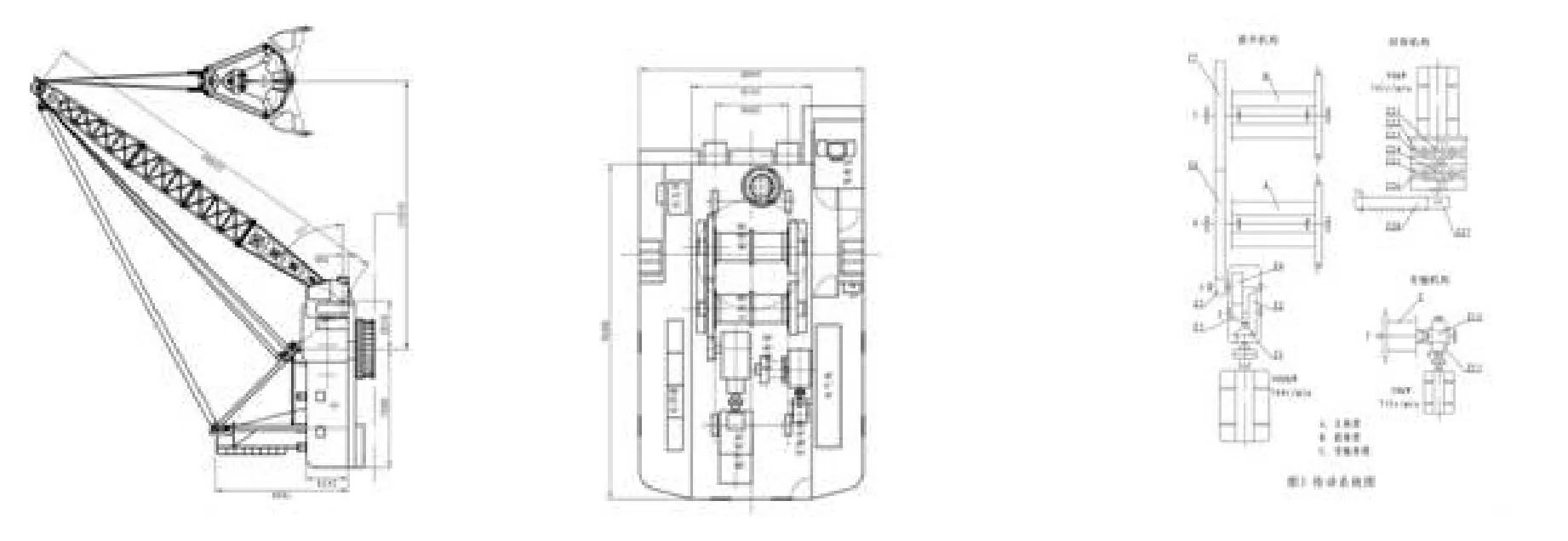
图4 平台整体布局图
由于变频调速通过内部计算机实现矢量控制,在50Hz以下实现恒转矩调速,调速性能能与直流电机相媲美,50Hz以上实现恒功率调速。恒功率调速主要用于快速下放,由于快速下放一般为空斗或轻负载时下放,因此变频调速也能满足工况要求,为了实现较硬的机械器组成闭环控制。
控制包括气路控制系统和电气控制系统,抓斗的挖掘、升降,平台回转及动臂变幅的调速通过先进的变频调速系统实现,该变频调速系统在电机轴上安装编码器以组成闭环控制系统,最终实现了机械装置的快速响应和高精度速度控制。回转支承采用三派柱式回转支承,特点是轴向及径向间隙小,受载更加稳定,承载能力更强,安装方便等特点;整机回转制动采用电气控制,提升卷筒采用大直径,并且是单出绳,减少钢绳弯曲度与损耗,增加钢绳寿命;提升钢绳采用双出绳,增加提升稳定性;配重部分采用配重沙,减少生产成本。方案设计图见图4。
3.3.2 刚柔耦合的多体动力学建模技术
解决途径:本项目通过Pro/E、ANSYS、ADAMS的联合仿真平台(图5)对船用抓斗挖掘机的抓斗作业过程的机构运动学、动力学以及振动响应特性等进行分析。抓斗机动作由起升、回转和变幅三大动力系统组成。项目通过建立船用抓斗挖掘机抓斗的运动学和动力学模型,并利用联合仿真平台得到仿真结果;利用Pro/E建立船用抓斗挖掘机的三维实体模型,应用大型有限元分析软件ANSYS完成吊索以及弹性动臂的固有模态分析,通过ANSYS与ADAMS的专用接口生成模态中性文件并导入ADAMS,实现工作装置刚体——柔性体耦合建模。同时为满足运动控制研究的需要,对挖泥船抓斗进行水平直线、斜线、垂直线及弧线的运动规划,并给出相关的仿真结果。
项目同时进行了船用抓斗挖掘机疏浚作业过程的建模与仿真的研究,研究在不同的疏浚环境和作业方式下吸口处泥浆的形成过程和计算泥浆比重的仿真模型,根据水力疏浚原理和6立方挖泥船的技术数据,设计泥泵和管路的清水特性曲线与泥浆特性曲线,在此基础上给出了泥泵工作点的计算方法。以提高挖泥船作业的工作效率。
3.3.3 挖掘轨迹控制以及综合监控系统的开发
解决途径:通过疏浚作业的要求建立抓斗挖掘剖面坐标系统数学模型,选取合适的抓斗挖掘轨迹控制方案,实现抓斗的挖掘轨迹的监测与控制。使抓斗按照预定的挖槽剖面进行施工,显著提高挖泥船的挖掘精度。
在实现挖泥船抓斗挖掘轨迹控制及原有挖泥船作业过程监控系统的基础上,开发抓斗式挖泥船综合监控系统。利用面向对象程序设计方法,合理划分系统软件各功能模块,创建施工水深及坐标数据库,采用数据库访问技术作为数据库与用户界面图形系统的接口,实现施工水深查询。
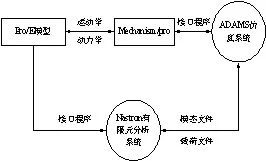
图5 虚拟样机平台
5 结论
综上分析,采用变频调速提高了系统的可维护性和可靠性。同时改变原来的变流机组由异步电机、直流发电机组成,效率在0.8以下,而变频器效率在0.95以上,从而起到了节能的效果。
[1]于凌宇.世界超级电容器发展动态[J].今日电子,2008(12):53-55.
[2]孟丽因.超级电容器组及能量管理系统[J].辽宁工学院学报, 2005,25(2):71-74.
[3]李晓娜.超级电容器在变电站直流系统中的应用[J].宁夏电力, 2008(5):16-19.
[4]王雪迪, 杨中平.超级电容在城市轨道交通中改善电网电压的研究[J].电气传动, 2009,39(3):77-80.
[5]李贵远, 陈勇.动力电池与超级电容混合驱动系统设计与仿真[J].系统仿真学报, 2007, 19(1):101-105.
[6]南金瑞, 王建群, 孙逢春.电动汽车能量管理系统的研究[J].北理工学报, 2005,5(5):384-389.
[7]张燕滨.变频调速460问[M].北京: 机械工业出版社.2006.
[8]韩国收获电气株式会社.SOHO-VD变频器用户手册[EB/OL](2009-07-09).
[9]GB/T3811-2008, 起重机设计规范[S].
[10]王栋.基于PC的虚拟样机集成仿真平台及其关键技术的研究[D].上海大学, 2007.
[11]侯红玲, 赵永强, 魏伟锋.基于ADAMS和ANSYS的动力学仿真分析[J].现代机械, 2005.
[12]夏鸿建.机械系统虚拟样机平台建模技术与动力学求解研究[D].华中科技大学, 2008.