手持激光雷达技术用于大型青铜器的精细测量
——以后母戊鼎为例
2013-12-11梁宁博王晏民王国利马燕如
梁宁博,王晏民,王国利,马燕如
(1.北京建筑工程学院现代城市测绘国家地理信息局重点实验室,北京100044;2.中国国家博物馆科技处,北京100006)
一、引 言
后母戊方鼎是中国殷商晚期(约公元前16世纪至公元前11世纪)王室祭祀用的青铜礼器。在以往公布的数据中,其通高133 cm、口长110 cm、口宽78 cm、重832.84 kg。长方形鼎体高大厚重,形制雄伟,在两侧的短壁上铸接两只直耳,下有四根圆柱形鼎足,四足中空。鼎身四面在方形素面周围以饕餮作为主要纹饰,四面交接处则饰以扉棱,靠近扉棱上部为牛首纹,下部为饕餮纹。作为殷商时期青铜范铸技术的代表作,该鼎是迄今为止世界上发现的年代最久、体量最大的青铜器。
然而,由于受到测绘方法及手段的制约,以往研究者只能利用直尺和外卡规等工具对其外形上的长、宽、高进行测量分析。这种作业方法的缺点主要体现为:①精准度低;②难以操作;③区域受限;④信息量少。尤其对大鼎壁厚的测量更是困难重重,从而大大影响了对其铸造结构的精准判断。
2011年,国家博物馆对这件镇馆之宝进行了综合性技术研究,其中一部分立项内容便是与笔者所在单位合作,针对这一长期无法解决的问题,提出以手持激光雷达为基础的精细测量方法对大鼎进行结构分析的思路。即首先采用离散点的形式对大鼎进行数据采集,并对多站数据分别进行拼接,最终以高精三角网模型为依托进行精细测量,并通过制作剖面法、造型图解法来研究鼎身的结构信息。经试验分析发现,此方法精度高,切实可行,能够准确反映大鼎真实的三维结构信息,为大鼎的铸造工艺研究维护、表面锈蚀层的病害研究提供了详尽的基础数据。
二、数据获取与预处理
后母戊鼎是目前世界上发现的最大的青铜器,但其相对于建筑物或大型现代工业产品来说,体量较小,加之青铜器表面结构纹饰复杂,为了在扫描过程中能够获取更全面的三维信息,扫描仪可以选用关节臂式坐标测量系统或手持扫描仪。本次对大鼎扫描所采用的是关节臂式坐标测量系统。
1.关节臂工作特点
关节臂式坐标测量系统由多个关节构成,安装有测量探头的测量臂为测量端,由作业员牵引在物体表面滑动扫描。机械臂上装有角度传感器,可以实时测量关节的转动角度,根据臂长和各关节的转动角度计算出测量点的三维坐标。用关节臂获取的点云精度在亚毫米级,生成的三角网模型的表面精度也很高,可以满足实际测量和分析的需要。海克斯康INFINITE2.0性能指标见表1。
2.点云数据采集
为了获取大鼎的完整数据,扫描采用分站设点、站点之间数据互补的原则,以此获取鼎的完整数据。布站要合理,充分考虑扫描仪自身情况,即扫描现场的环境,为后续数据配准打下良好基础。本次扫描站点布设如图1所示,4个角点代表架站位置。站点布设原则有:①站与站之间要有足够的重叠度,以保证数据的完整性;②在保证数据连接的情况下,尽量少设站,避免拼接误差,同时也应减少数据冗余,提高数据处理效率。

表1 INFINITE2.0性能指标

图1 站点布设分布图
3.数据预处理
(1)点云配准
为了获取到高精度三角网模型,要先将各站的点云配准,目前点云配准的主要方法有标定物拼接、迭代最近点法[1]。图2为配准后的大鼎整体点云。
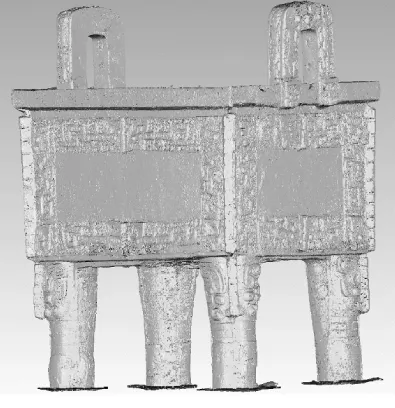
图2 后母戊鼎整体
(2)三角网模型的构建
三角网模型是精确表示空间不规则物体的最佳模型,而实际所获取的是一系列不规则排列点的三维坐标,这些点不能有效地再现实物表面,因此首先需要将其构建成完整、具有高精度的空间信息的实体模型。一般构网步长以重采样的间距为准[2],但由于数据量的原因,一般情况下,只有在测量和分析时才采用精密三角网模型,而在制作彩色三角网模型和正射影像时,利用的都是简化三角网模型。如图3所示,(a)为精细三角网模型,(b)为简化三角网模型。

图3 三角网模型
三、精细数字化测量与分析
以扫描的高精度点云数据为基础,利用软件可以快速得到大鼎的三角网模型,图3是鼎的三角网模型。下面就三角网模型在大鼎研究中的应用作详细介绍。
1.尺寸量测
(1)常规测量
后母戊鼎构造复杂,主要包括口沿、鼎身、四足、鼎耳、扉棱、铭文等部分。利用单一的一组数据很难准确表达其详尽的尺寸信息。其自身形体也并不规则,用钢尺、外卡规等传统的测量方法,很难采集到齐全且精度高的尺寸信息,而借助精细三角网模型可以直接获取到所需数值。如图4所示,A和B是空间中的两点,通过模型可以很容易获取到A、B两点在x、y、z3个坐标轴上的增量 d x、d y、d z和 A、B 两点之间的直线距离,由此可以很容易读取得到鼎一侧耳朵内侧的高度为392.7 mm(如图5所示)。
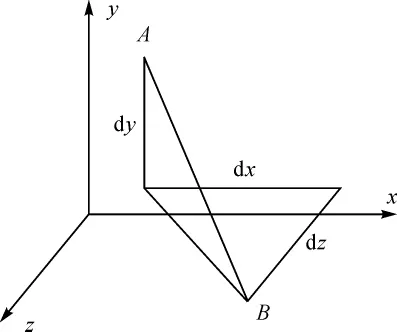
图4 数据显示方式

图5 鼎耳高度测量
为了验证通过精密三角网模型测量结果的可靠性,将传统方法手工测量值和模型测量值作了对比,由于数据的保密性,本文列出部分尺寸(见表2),这些数据都是于2012年4月份测量获取的。从表2中可以看出外卡规手测的值在一般情况下比通过模型测量的值要大。表3中测量值首行是1990年利用外卡规手测值,第2行是2012年4月份模型测量的值。通过表2、表3的比较可以看出传统作业方式获取的数值比在模型上获取的数值要大,差值在5 mm左右。
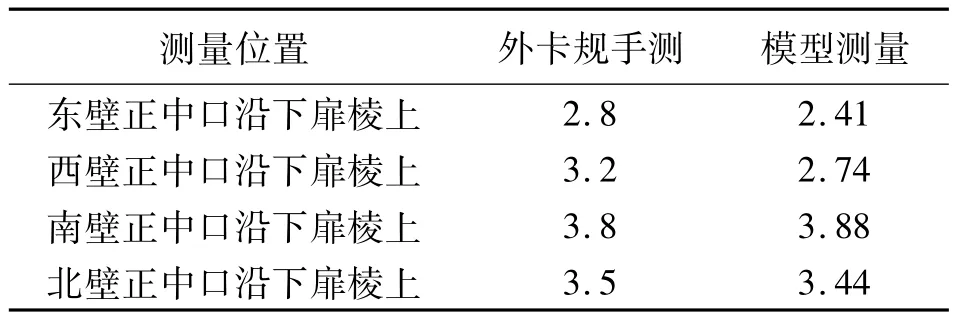
表2 传统方法与剖切量测数值对比表 cm

表3 基础尺寸部分数据表 cm
(2)体积和表面积测量
利用三角网模型,可以通过相关软件测量青铜器的表面积和体积。由于后母戊鼎的特殊性:鼎耳和四足都不是实心,因此在量测时不能准确计算鼎的体积,但是在其他没有此类问题的青铜器中,可以直接获取到其表面积和体积。
2.形状结构分析
对于鼎的外形,通常都是通过观察和局部测量,以及其他分析来推断的,往往会因为分析数据的不连续性等因素导致对鼎的认识不全面,因此本文通过以下方法对鼎的形状和结构加以分析和研究。
(1)剖面法
利用三角网模型可以制作纵、横及水平方向的剖面来对鼎的结构作详尽分析。如通过设置剖切间距来判断鼎壁的变化情况(如图6所示),其中,图6(a)为剖面位置图,从左边第一条剖线开始,每隔200 mm做一剖面;图6(b)为图6(a)中对应各点处壁厚示意图,从中可以看出,对于同一水平剖面上不同位置的厚度呈现出中间厚两侧薄的特点。
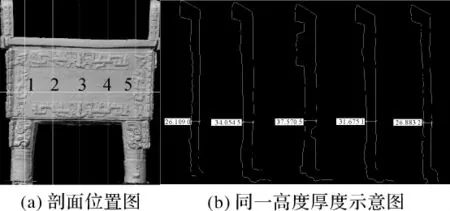
图6 剖面厚度示意
同样可以利用折线图更直观地体现这一规律,如图7所示。为了使该方法显得更有说服力,将原来采样点的间距缩小到100 mm,新增剖线位置示意图如图8中的A所示,从上部第一条剖线起,对应的折线图依次是图8(a)~(d)。从各折线图中可以看出,水平剖面上都呈现出中间厚两侧薄的趋势。其中,图8(a)和图8(d)中部位薄的原因主要在于剖切到了内壁的凹槽所致。图8(e)是4条折线图的叠加图,从中可以清楚地看到壁厚的变化规律是从上至下、从中间到两边变薄,因此可以推断出壁厚的最大值出现在中部靠上的部位,通过量测发现,最大值和最小值的差值超过了16.8 mm。

图7 厚度变化直线图
利用同样的方法对竖直方向上的厚度变化趋势加以分析。为了分析整体变化趋势,在剖切时尽量避开中间扉棱,本试验中剖线位置如图9所示,因为鼎身高度有限,特将采样间隔设置为50 mm,最终得到竖直方向厚度变化折线示意图如图10所示,其中左线剖面厚度采样折线图为图10(a),右线剖面为图10(b)。在图10(a)中,3~6点和15~17点采样值在上下部位饕餮纹之上,故厚度变化比较大,14点的内壁恰好剖切在凹槽处,故厚度急剧减小;从6~13点可以看出,厚度的变化规律是从上到下先逐渐减小,到第8个点附近开始增大,到12点达到最大,然后又开始减小。同样在图10(b)中,折线从第6点开始厚度逐渐减小,直到第10点之后则开始增大,在12点处达到一个小高峰,然后又逐渐减小。
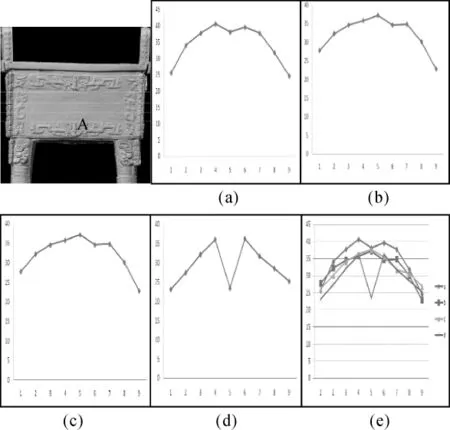
图8 加密后厚度变化折线图

图9 竖直方向剖线位
通过横纵剖切面的分析可以得出,鼎身南壁的厚度不均匀,主要变化趋势是在水平方向上呈现中间厚、两侧薄;在竖直方向上呈现出上厚下薄。

图10 竖直方向剖面厚度折线图
(2)造型图解法
造型图解法原理很简单,给所要分析的剖面定一基准参考平面,使其与要进行造型图解的壁面最高点或最低点相切或便于分析的位置,并保持平面与壁面整体平行,然后将壁面投影到平面上,根据壁面距离平面的距离赋予不同的颜色值,这样能直观地看出壁面的变化情况。本文对大鼎外部底面造型图解时所给定的基准参考平面是平行于内部底面、比外部底面最低点(中间位置)高20 mm的平面。图11(b)所示为底部外侧的造型图解图,图11(a)为三角网模型正射图。通过造型图解图可以清楚地看到底部铸造痕迹的变化情况,整个外底面最高点和最低点的差值在30 mm左右。通过图解发现在西北(右上)处变形比其他部位小,但是通过进一步分析发现东北(左上)、西北(右上)、西南(右下)、东南(左下)的高度差值均保持在17.5 mm左右,而之所以会显示出西北比其他部位变形小的原因是:西北角较其他3个位置整体高差差保持在12.5 mm左右。同样,可以根据此方法对其他壁面进行分析。通过造型图解法,可以形象地展现壁面在铸造过程中的变形情况,为鼎底铸造结构的深入研究提供有力证据。
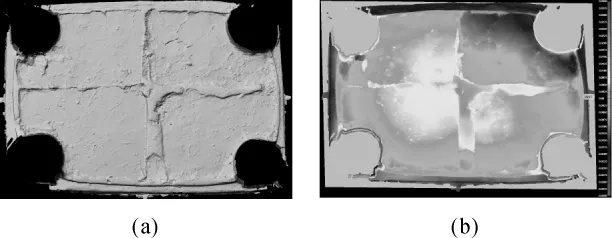
图11 底部外侧造型
四、结束语
通过本次试验,方便地获得了鼎的精确三维尺寸信息,并通过剖切法和造型图解法,对鼎的结构和变形情况有了进一步的认识,而这些是以往的分析手段很难实现的。这恰恰证明利用三维激光技术对青铜器进行结构研究不仅切实可行,而且有着其他研究方法无可企及的优势。
目前,地面激光雷达技术在古建修缮、工业测量等行业上发挥了积极的作用。相信随着社会对地面激光雷达技术的进一步认可,其在青铜器乃至各种材质文物的保护研究方面都会有更加广阔的前景。
[1]王晏民,郭明,王国利,等.利用激光雷达技术制作古建筑正射影像图[J].北京建筑工程学院学报,2006,22(4):19-22.
[2]王晏民,豁辉,王国利,等.地面激光雷达技术在白居寺吉祥多门塔变形分析中的应用[J].北京建筑工程学院学报,2011,27(4):11-15.
[3]王蕙贞.文物保护学[M].北京:文物出版社,2009.
[4]华觉明.司母戊鼎铸造工艺的再研究[C]∥中国冶铸史论集.北京:文物出版社,1986:90-95.
[5]付红云,王晏民,胡春梅.一种新的基于地面激光雷达数据正射影像图制作方法[J].北京建筑工程学院学报,2011,27(4):16-21.
[6]张剑清,孙明伟,郑顺义,等.基于轮廓约束的摄影测量法元青花瓶数字三维重建[J].武汉大学学报:信息科学版,2009,34(1):7-10.
[7]孙德鸿,蒋涛,周谦益,等.三维激光扫描技术在工业三维 GIS方面的应用[J].测绘通报,2011(8):90-91.
[8]王廷亮,夏国芳,胡春梅.利用三维激光扫描技术进行工业设备三维重建及变形分析[J].测绘通报,2012(2):94-96.
[9]王晏民,洪立波.现代工程测量技术发展与应用[J].测绘通报,2007(4):1-5.
