基于LiDAR数据与数字相机快速生成正射影像技术研究
2013-12-06范亚兵王明海潘静原任政圭
范亚兵,王明海,潘静原,任政圭
(61363部队,陕西 西安 710054)
正射影像作为一种数字测绘产品,同时具有几何精度、数学精度和影像特征,信息量大,内容丰富,直观真实,应用前景广阔[1]。传统摄影测量的方法生产正射影像精度高,但生产周期长,费用高。随着国民经济和国防建设的快速发展以及获取特殊突发性自然灾害地区的第一手灾情影像等诸多应急需求,传统正射影像制作技术显然很难满足上述需求。
激光雷达技术(Light Detection And Ranging,Li-DAR),有些文献也称之为激光扫描(Airborne Laser Scanner,ALS),它是一种主动式对地观测系统,可用于快速获取大面积三维地形数据、快速生成DEM等数字产品,LiDAR可以实现全天候对地观测,能直接获取真实地面的高精度三维地形信息,在一些特殊困难地区如森林地区,LiDAR可以在一定程度上穿透树木遮挡,具有传统摄影测量方法无法取代的优势。在许多场合,激光雷达测量技术可以弥补现有其他航空传感器的不足,通常将LiDAR与中幅数字相机集成在一起,同时获取地表影像信息与地形数据[2-3]。
基于LiDAR数据与数字相机快速生成正射影像技术正是利用激光雷达和数字航摄相机这两种技术优势,通过系统的硬件集成和相应的数据处理软件快速生成正射影像,该技术与传统技术相比较,制作成本降低,周期短,影像质量可靠,极大地满足了应急测绘的需求。
1 DSS/LiDAR系统原理与组成
DSS(Digital Sensor System)数字航摄相机是Applanix公司研发的航空型相机系统,与Riegl公司的LiDAR系统集成在一起,可以安装在直升飞机或固定翼飞机上。
LiDAR对地观测定位纯属几何定位,利用激光脉冲测距仪可精确测定发射点到地面反射点(激光脚点)的斜距ρ,惯性导航系统(INS)测定飞行器在空间的姿态参数,GPS提供飞行器精确的位置信息,联合可求出每个激光脚点精确的三维空间直角坐标[4],如图1所示。
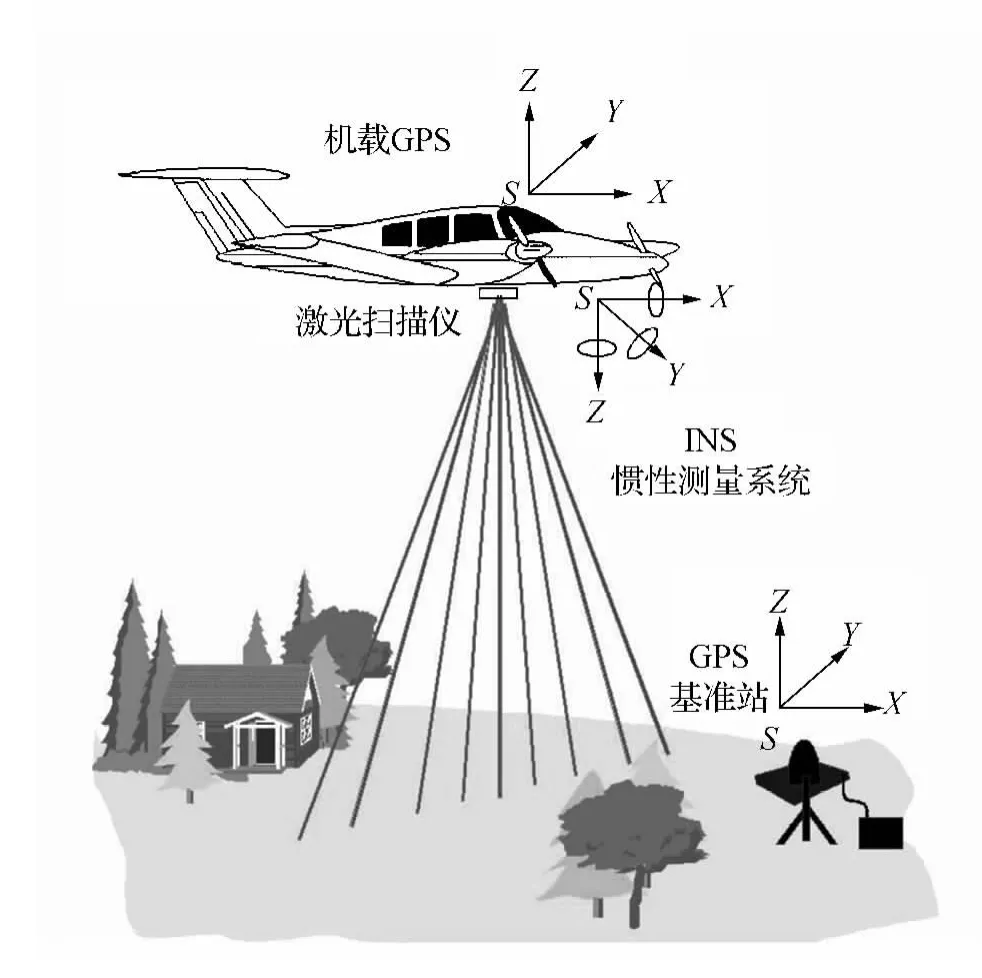
图1 LiDAR对地观测原理示意图
如图2所示,DSS/LiDAR系统的主要组成部分包括:①确定激光雷达信号发射参考点空间位置的动态差分GPS接收机;②测定扫描装置主光轴位置、姿态参数的惯性测量装置,一般采用惯性导航系统INS,也可称为惯性测量单元IMU;③测定激光雷达信号发射参考点到地面激光脚点间距离的激光测距仪;④成像装置,一般为CCD数字相机,用于获取对应地面的彩色数码影像,用于最终制作数字正射影像;⑤工作平台,可以是固定翼飞机、飞艇或直升机等航空器[5]。

图2 机载LiDAR系统及其IMU/DSS相机
2 正射影像制作原理与数据处理
DSS相机直接获取地面数字影像,由于传感器姿态或地形起伏等原因,存在地物位置偏差及地物变形的问题。正射纠正是解决这一问题的有效途径,可以有效地剔除由于传感器和相机旋转、地形起伏以及在图像获取和处理过程中产生的位置误差,最终生成无变形、同时具有地图几何精度和影响特征的图像,即数字正射影像(DOM)。
数字微分纠正是指根据有关的参数与数字地面模型,是目前最为有效、快捷的正射影像纠正方法,其制作原理是采用小区域作为纠正单元,通过纠正单元的实际地面高程来控制影像纠正元素,以此实现从中心投影到正射投影的投影变换。通常通过采用双线性内插进行灰度内插运算,然后将像点的灰度值赋值给纠正后的像元素,依次对每个纠正元素进行运算处理,从而获得纠正的数字图像[6]。
航空摄影时机载LiDAR设备采集地表三维信息,DSS获取影像信息,GPS/INS记录飞行器位置与姿态数据;在数据后处理过程中,首先解算POS数据,并将提取后的LiDAR原始数据转换成LiDAR点云;对DSS影像数据进行辐射纠正得到真彩色影像;利用航带间重叠区域的LiDAR点云可以进行LiDAR设备的检校,检校后重新生成LiDAR点云,再对点云进行滤波分类处理,编辑后生成DEM;结合POS数据以及LiDAR提供的DEM数据,无需空三处理即可快速生成正射影像,其流程如图3所示。
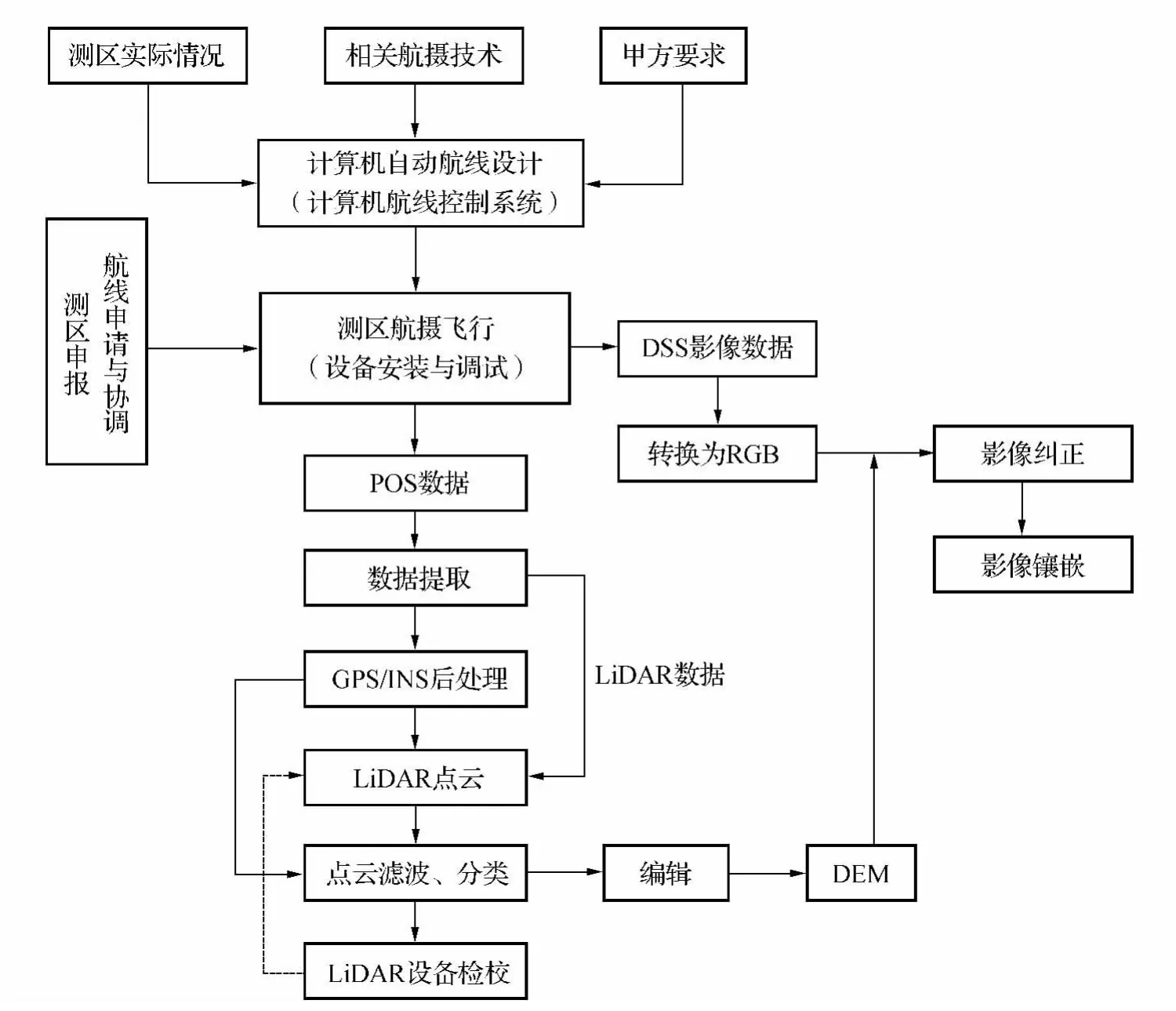
图3 DSS/LiDAR数据处理流程
3 DSS相机与LiDAR设备检校
高精度的正射影像制作需要高质量影像与地表三维数据,同时需要对设备进行检校,即确定GPS、IMU、DSS相机与LiDAR之间的精确几何关系[7],需要检校的参数有:①GPS、DSS相机、LiDAR与IMU之间的偏心分量(Lever Arm);②DSS相机与LiDAR的 偏 心 角(Bore sight Misalignment);③IMU与LiDAR的偏心角;④DSS相机的内方位元素:焦距F、像主点、镜头畸变差。
DSS相机系统的检校可以采用传统摄影测量中的相机自检校光束法区域网平差方法,LiDAR系统误差对定位结果的影响一般表现为系统性的,为了获取高精度的三维地表信息,必须采取措施消除系统误差,一般采用飞行检校场方法消除系统误差的影响。将多条激光扫描线覆盖同一扫描区域时彼此重叠,航带之间测定的同一点的坐标和高程会有所差异,根据这些差异建立相应的参数模型,利用最小二乘匹配技术求解这些参数,对检校场飞行的要求如下:
1)在不同的高度飞行同一区域(如2km2),即不同的GSD;
2)4条南北方向,两条东西方向(也可其他方案);
3)地形需一定的起伏;
4)测区4角与中心布设控制点。
表1为DSS439相机系统在不同焦距、不同地面采样间隔(GSD)时的检校场航摄飞行参数方案设计;图4为40mm镜头DSS相机检校场航摄飞行方案示意图,GSD分别为20cm与30cm。

图4 检校场飞行方案示意图

表1 相机检校场飞行方案设计
4 试验与分析
本文通过从LiDAR系统中的点云数据提取DSM,对同步采集的数字影像进行数字微分纠正快速生成正射影像。
4.1 原始LiDAR数据预处理生成规则DSM
原始LiDAR点云数据按照时间采集和存储,分布图呈现离散的点云,直接处理相对困难,需要进行预处理,即针对原始点云数据进行重采样,获得通过距离进行采样的规则格网数据。本试验中首先将原始点云数据格网转换成光栅图像,然后采用最临近距离的算法进行重采样。为了消除图像中的漏洞点,采取数据内插滤波补值法,即利用像素周围的3×3邻域像素值平均值作为该像素值。
4.2 结合数字影像生成正射影像
同步获取的数字影像与LiDAR点云数据,由于二者坐标系统一致,无需进行DSM与航片的图像配准。同时通过正射影像软件LPS可以直接利用POS解算的外方位元素值和从已知的数学表面模型中得到的地面高程数据,对航摄数字影像进行单片正射纠正操作,然后自动镶嵌生成分幅正射影像图,根据需要对正射影像进行调色处理,得到色调均匀、反差适中、纹理清晰的正射影像成果。
图5为基于原始LiDAR点云数据获取的数字表面模型,生成试验区的数字正射影像成果。经过正射纠正后的数字影像具有真实的几何信息和详细的地物信息,地物位置的偏离得到了纠正,为进一步建筑物分类提取、三维几何模型重建以及建立城市的三维场景等奠定基础。

图5 结合航空影像生成的正射影像
5 结束语
机载LiDAR点云数据获取地表三维信息数据处理速度快、自动化程度高、作业安全,与DSS数字相机集成后可快速生成正射影像。本文对原始Li-DAR数据首先进行预处理获取数字表面模型,再通过数字表面模型对以中心投影的航空数字影像进行正射纠正、镶嵌,生成消除投影差的真正射影像图。尤其是在某些特殊应用中,例如林业、海岸工程等以及特殊突发性自然灾害地区的第一手灾区影像,快速生成正射影像技术能很好地发挥作用,在国民经济和国防建设以及防灾救灾等领域具有广阔的发展前景和应用需求。
然而,基于LiDAR数据快速制作高精度正射影像仍然处于研究开发阶段,有许多问题需要进行深入的研究,比如系统误差的模型建立、LiDAR系统的检校、LiDAR激光点云数据的滤波分类算法、以及如何利用LiDAR提取地物和建筑物三维重建等,这些都将是下一步所要具体研究的内容。
[1]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[2]王之卓.摄影测量原理[M].武汉:武汉大学出版社,2007.
[3]尤红建,江月松,李树楷.机载遥感直接对地定位的误差分析和精度估计[J].测绘学报,1998,27(1):86-91.
[4]江振治,马晓峰,郑浩,等.机载GPS天线与航摄相机偏移测定方法及相关问题的讨论[J].解放军测绘研究所学报,2002,22(2):9-12.
[5]刘少创,尤红建,刘彤,等.机载激光测距-扫描成像制图系统的定位原理与误差分析[J].武汉测绘科技大学学报,1999,24(2):124-128.
[6]刘基余,陈小明,李静年.GPS动态载波相位测量的航摄飞行试验及其分析[J].导航,1995(2):76-91.
[7]刘经南,张小红,李征航.影响机载激光扫描测高精度的系统误差分析[J].武汉大学学报:信息科学版,2002,27(2):111-117.
