GPS车载导航定位技术研究
2013-12-06刘兴明包晓光
刘兴明,包晓光
(辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
随着汽车的普及、交通需求的增长,道路运输所带来的交通拥堵,交通事故和环境污染等负面效应,逐步成为经济和社会发展中的全球性问题。车载导航系统作为智能交通系统(ITS)的重要组成部分,是解决这一问题的重要途径之一[1]。
近几年,国内车载导航系统的发展如火如荼[2]。本文从系统设计、定位方法分析、信息提取和坐标转换、导航电子地图制作几个方面研究车载导航定位技术。
1 系统设计
车载导航系统由导航计算机、天线、GPS接收机、控制面板、车速传感器、陀螺传感器、扬声器、LCD显示器、CD-ROM驱动器、存储器、网络通信接口、语音电路和红外遥控器等组成[3],如图1所示。

图1 GPS车载导航系统结构框图
安装在车上的GPS接收机通过天线源源不断地接收GPS卫星信号,经过串口把这些信号传输到导航计算机,导航计算机提取出所需的经度、纬度、速度和航向等数据后,再将由车速传感器和陀螺传感器构成的DR系统的信息进行融合,通过坐标转换、精度分析和误差改正等算法得到车辆的定位信息,最后在由GIS软件制作的电子导航地图上显示车辆的位置,同时,通过语音提示来引导驾驶员选择最优的行驶路线。其中,电子地图上显示的不仅仅是车辆的当前位置,还包括车辆通行范围内的地理信息,如加油站、医院、学校等。另外,导航计算机还能够利用通讯模块进行无线通讯,来接收驾驶者的控制信息。
2 定位方法分析
随着车载导航定位技术的飞速发展,各国研制的汽车导航定位系统采用的方法很多,但全球定位系统(GPS)、惯性导航系统(INS)、航位推算系统(DR)、地图匹配(MM)、地面无线电频率定位(TRF)等单一定位方法都存在一定的不足[4],因此采用GPS/DR/电子地图组合定位方法,由文献[5]知这种方案是陆地车辆导航的最佳方案。
图2是一种典型的GPS/DR/MM组合导航系统的硬件组成结构图。DR系统由车速传感器、角速率陀螺仪和数据采集卡构成。车速传感器将测得的汽车速度经信号调理电路调理后传给数据采集卡,同时,由角速率陀螺仪测出的速率信号经调理后一并传给数据采集卡。然后数据采集卡将这路信号传入导航计算机,加上通过串口读取的GPS接收机信号,从而实现DR算法。DR系统的工作原理是:当可用卫星个数足够时,即GPS接收机能接收到4颗以上GPS卫星信号,导航系统即采用GPS/DR/MM组合的方式;当载体接收不到足够的卫星信号时,例如载体进入高楼林立的市区或隧道时,导航系统则进入DR模式,并将卫星信号丢失前的最后一点作为初始点,以其坐标位置与航向值作为初始数据,通过航位推算进行自主导航,同时由于GPS位置精度的原因,在结合数字地图分析处理时会出现轨迹点偏离道路的现象,此时应用地图匹配技术获得结合路网的轨迹描述[6]。

图2 GPS/DR/MM组合导航系统的硬件组成
3 数据提取与坐标转换
3.1 GPS信号数据格式
GPS接收机采用NMEA0183标准,该标准是美国国家海洋电子协会(National Marine Electronics Association)为海用电子设备制定的标准格式。目前也已成了GPS导航设备统一的RTCM(Radio Technical Commission for Maritime services)标准协议。
在接收GPS数据过程中,常用的定位语句是“GPRMC”语句,从$GPRMC段中可以获得定位所需的经纬度、行驶速度等信息[7]。
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11><CR><LF>
1)标准定位时间(UTC time)格式:时时分分秒秒.秒秒秒(hhmmss.sss)。
2)定位状态,A=数据可用,V=数据不可用。
3)纬度,格式:度度分分.分分分分(ddmm.mmmm)。
4)纬度区分,北半球(N)或南半球(S)。
5)经度,格式:度度分分.分分分分。
6)经度区分,东(E)半球或西(W)半球。
7)相对位移速度,0.0至1 851.8knots。
8)相对位移方向,000.0至359.9度。
9)日期,格式:日日月月年年(ddmmyy)。
10)磁极变量,000.0至180.0。
11)度数。
3.2 GPS信号坐标提取
通过编制程序,可以从GPS采集的数据中提取出经纬度,这些基本信息以MID或者MIF这种文件格式储存,MIF文件由文件头和数据段组成,文件头包含的信息是图形属性信息中的名称、类型、长度,数据段中包含了图形实体的图形数据,而MID文件为对应实体的属性数据MIF.MID文件是MapInlo的外部数据交换文件,可以在MapInlo中使用,直接将定位数据在图中显示。
3.3 GPS车载导航系统坐标转换
3.3.1 大地坐标转换为空间大地直角坐标
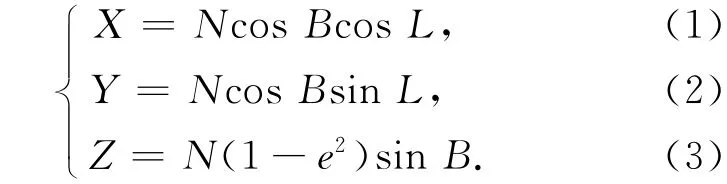
WGS-84坐标系是大地坐标系,用大地纬度B,大地经度L和大地高H来表示点的位置。北京54坐标系和西安80坐标系是空间大地直角坐标系,用X,Y,Z来表示点的位置。
图3所示的子午椭圆面相当于图4所示的ONP平面,其中PP2=Z,相当于图4所示的Y;OP2相当于图4所示的X。两平面的经度L可视为相同,等于∠P1OP2,于是可以直接写出:X=xcosL,Y=xsinL,Z=Y得当已知椭球面上任一点P的大地坐标(B,L),可直接求出该点的空间大地直角坐标(X,Y,Z)。
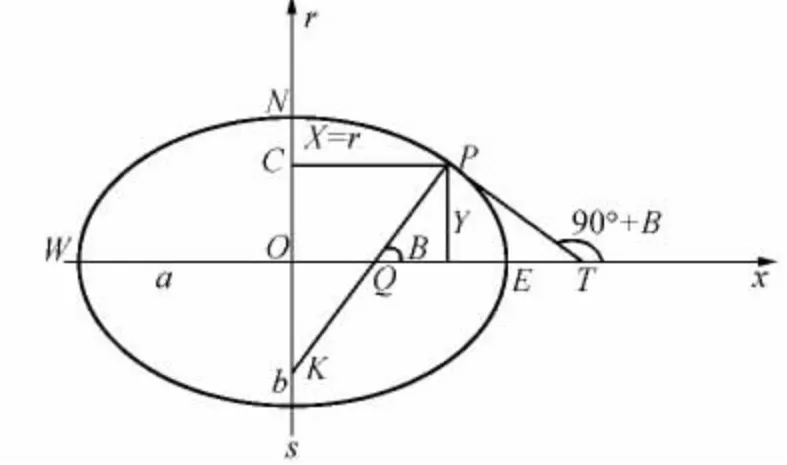
图3 子午椭圆面
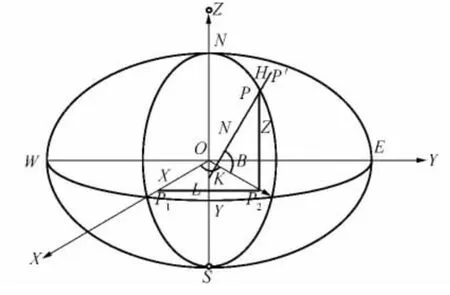
图4 ONP平面
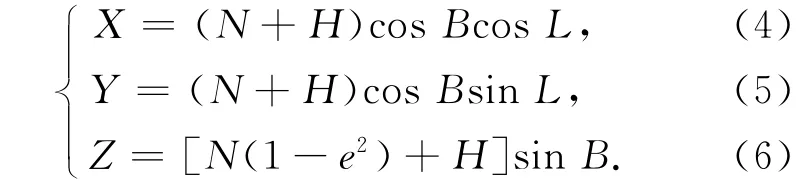
如果P点恰好不位于椭球上,例如,位于大地高为H的P′点处,此时由大地坐标求空间大地直角坐标的公式则为
3.3.2 北京54坐标转换为西安80坐标
1)将北京54坐标系中的平面坐标(X54,Y54)按照高斯投影坐标反算公式换算成大地坐标(B54,L54)。
2)将大地坐标(B54,L54)换算成西安80坐标系中的大地坐标(B80,L80)。
3)根据高斯投影坐标正算公式,将大地坐标(B80,L80)换算成平面坐标(X80,Y80)。
4 试验结果及分析
首先,将导航数据导入相关软件中生成行车路线;第2步,导入行车本地精确电子地图;第3步,将导航数据与精确道路网数据进行匹配;第4步,计算修正匹配后的点位,并重新生成匹配后的线路效果,验证算法结束[8-9]。
实验选择的行车路线为从辽宁省测绘局到沈阳市第十一中学。选择这条线路的主要原因是线路两旁5m范围内均有高楼或树木遮挡GPS信号,使定位结果产生误差,针对这种GPS观测环境较差的区域,对地图匹配精度进行检验。这种情况下进行实地跑车实验,具体匹配结果如图5所示[10]。

图5 车辆匹配前后的轨迹图
实验过程中,共进行了3次道路选择,都没有发生错误,由此可以说明该地图匹配算法具有较高的可靠性和稳定性。图5中,浅色的轨迹是匹配前GPS接收机定位数据连成的曲线,深色的轨迹是匹配后的行车路线。从图中可以看出,匹配前定位数据存在很大的误差,尤其是在交叉路口。匹配后,定位轨迹精确地符合到正确的道路上了。
对于一般道路的匹配,匹配时只需要利用最短距离投影法将GPS定位轨迹投影到道路中心即可。图6和图7分别为匹配前后的轨迹图。
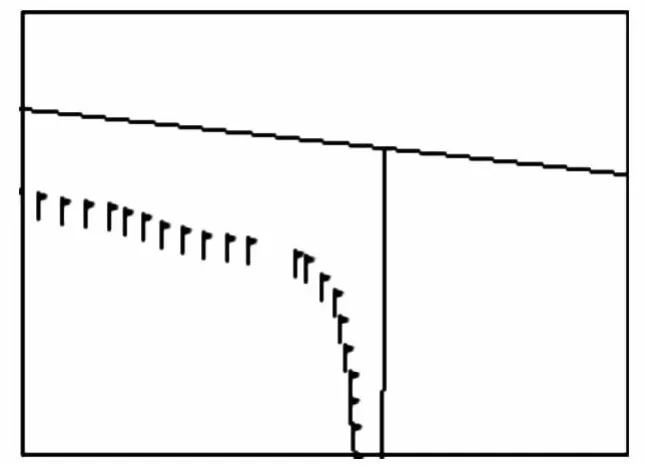
图6 原始跑车轨迹
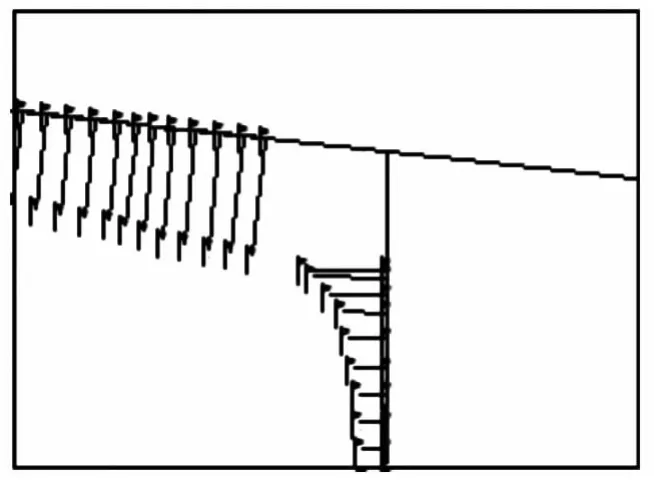
图7 最短距离投影方法的匹配结果
从图中可以看出,采用最短距离投影法匹配结果是正确的,符合实际情况。说明在一般道路时(尤其是直行道路)采用最短距离投影法具有较高的匹配效率。
5 结束语
一个基本的车载导航系统由导航计算机、GPS模块、天线、控制面板、车速传感器、陀螺传感器、存储器、网络通信接口、语音电路、LCD显示器、扬声器和红外遥控器等组成。
任何一种单一的定位方法都有其自身的局限性,因此,将几种定位方法有效地组合,可大大提高定位精度和可靠性。其中,GPS/DR/MM组合定位方法是陆地车辆导航较好的组合定位方法。
GPS卫星信号所包含的定位信息有其特定的格式,利用Visual C++编写程序可将其中所需的定位信息提取出来;GPS定位系统应用的坐标系为WGS-84坐标系,最终,通过七参数模型将其定位坐标转换成国家大地坐标系。
电子导航地图的制作过程即是原始地图信息的整合过程,将采集的数据构成不同的属性集,按照适当的数据管理方式逐级分层,最终显示在相应的导航设备上。
[1]张志才,朱泰英.智能运输系统项目社会经济影响评价方法[M].北京:清华大学出版社,2008.
[2]李宏利,赵慧明,杜治华,等.车载导航系统中的路径诱导模型与数据组织[J].地理信息世界,2011(5):37-41.
[3]刘惠艳.GPS车载导航系统研究[D].北京:中国石油大学,2007.
[4]黄俊,罗钧.基于GPS_DR的嵌入式车载导航系统研究[J].仪器仪表学报,2008,8(8):589-590.
[5]宫雨生,徐爱功.车载GPS_DR_电子地图组合定位导航研究[J].辽宁工程技术大学学报,2005,24(4):80-82.
[6]李清泉,黄练.基于GPS轨迹数据的地图匹配算法[J].测绘学报,2010,39(2):207-212.
[7]容蓉.基于GPS/GPRS的MCU车载智能终端的设计[D].成都:西南交通大学,2011.
[8]郭志,胡丛玮.GPS导航路径的实时表示[J].测绘通报,2010(6):27-29.
[9]马海波,李少杰,黄跃峰,等.车载导航系统的高精度定位算法[J].地理信息世界,2010(1):48-55.
[10]华亮春,段佳,熊学新.GPS车载导航电子地图制作系统的设计与实现[J].测绘与空间地理信息,2007,30(6):126-128.
[11]LI Y,C.RIZOS.Triple Integration of GPS,Locata and INS for Seamless Integrated Navigation in Urban Environments[Z].Proceedings of 2010International Symposium on Inertial Technology and Navigation,NanJing,2010.
[12]QUDDUS M A,WASHINGTON Y O,ROBERT B N.Current Map-matching Algorithms for Transport Applica-tions:State-of-the Art and Future Research Directions[J].Transportation Research Part C,2007(15):312-328.
