高性能瞄准装置伺服系统的设计与实现
2013-11-21王昌锋王晋安张鹏飞
邵 婷,胡 瑛,王昌锋,王晋安,张鹏飞
(西北机电工程研究所, 陕西 咸阳 712099)
瞄准装置是配备于某舰炮武器系统上的一种半自动操瞄系统,可以通过操纵瞄准装置来搜索、识别、捕获、跟踪目标,控制舰炮独立完成对海陆空低速目标的打击。瞄准装置伺服系统用来控制瞄准镜的运动,它的跟踪精度直接影响舰炮的命中率。笔者以DSP+CPLD框架为核心,从减小体积、提高伺服精度,适应宽温度范围,提高系统抗干扰能力的角度考虑,采取带前馈的三闭环控制结构和带温度系数的PID算法设计实现了位置控制精度高、体积小、集成度高的直流伺服系统,以适应战场恶劣环境,实现瞄准镜的精确运转。
1 瞄具伺服系统工作原理
1.1 系统工作原理
瞄具伺服系统是一种由火控计算机给出位置量来控制瞄准镜运转的角位置伺服系统,可实现方位和高低方向的独立运动或复合运动。设计瞄准镜控制器实际上是设计了控制方位、高低运转的两套位置环调节器,分别对方位、高低运动进行控制。本系统中,瞄准镜在方位、高低上运行角度均受限制,主要是保证工作人员的安全以及避免瞄准镜受到损坏。系统结构框图如图1 所示[1]。

1.2 提高系统精度的措施
在瞄具伺服系统中,瞄准镜的最高转速为30(°)/s,相当于转速5 r/min,系统选择低转速、大转矩的直流电机来直接带动瞄准镜;选择精度高、可靠性强的速比为1∶32的粗精通道组合的旋转变压器作为系统位置检测元件;同时本系统中采用力矩电机与旋转变压器为同轴安装,摒弃复杂的机械传动链以减小传动间隙,提高系统精度[2]。
采用带前馈的三闭环方案以提高系统的静、动态性能;为使瞄具在宽温度条件下达到指标要求,克服因温度变化引起的系统摩擦力变化,系统采用测温范围宽,分辨率高的数字式温度传感器与DSP连接,获取环境温度,作为PID参数调整时的依据。
本系统控制器采用DSP和CPLD结合的方法,利用TMS320F28335高速浮点运算能力处理软件算法程序,利用CPLD逻辑能力强处理速度快的优点,简化外围电路,减小控制器体积,提高系统可靠性和兼容性[3]。
2 伺服系统硬件设计与实现
2.1 系统功能
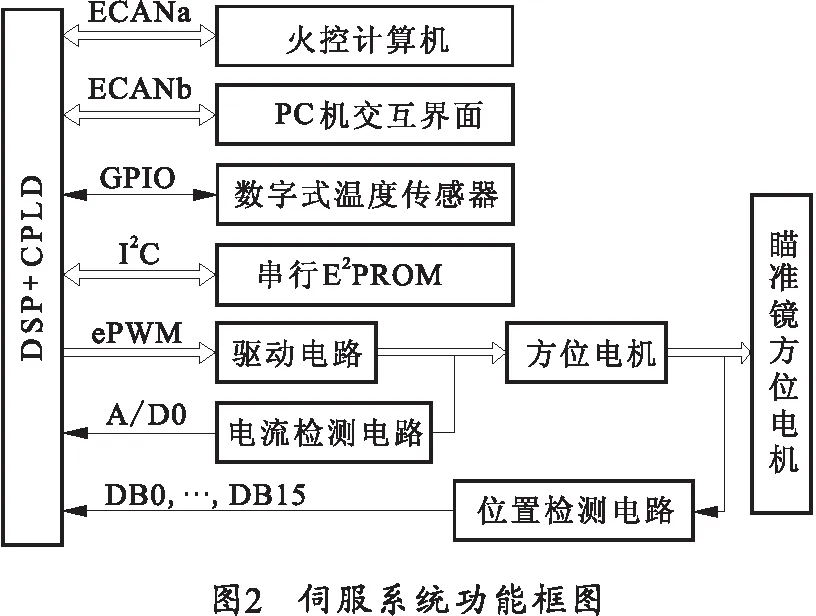
该伺服方位(高低)控制系统的系统功能框图如图2所示[4-5],由DSP控制电路用定频调宽法调制PWM波,输入至驱动电路以驱动电机运动;数字式温度传感器通过IO口读入温度数据,作为PID参数选择的依据;电流检测电路用于对电机的输入电流进行检测,经AD采样后输入至DSP作为电流反馈;位置检测电路用于完成对电机运动角度的提取和量化,输入至DSP作为速度和位置反馈;CAN总线通信电路用于将伺服系统连接至CAN总线网络,DSP与火控计算机之间接收位置给定、发送位置反馈,交互电路主要是实现计算机与DSP的通信,设置电机参数和期望的被控对象运动轨迹,计算机通过与DSP的通信实时掌握系统的运行情况;存储电路用于储存PID参数。
2.2 主要电路功能模块介绍
由于直流电动机要求工作在正反转的场合,本系统采用双极性驱动的可逆PWM系统,选择体积小,功率大集成了驱动电路、功放电路、过电压电流检测及热过载保护电路的SA03作为功率驱动器件,DSP的定时计数器比较单元根据软件控制算法计算出PWM控制量,输出一定频率的调宽波,由输出引脚GPIO0经光耦6N137给至SA03的+PWM引脚[2]。
将SA03的保护电机的引脚接入CPLD,同时接入CPLD的还有DSP停止信号、DSP运行信号,瞄准镜机械位置的上限和下限信号,在CPLD中编写相应的保护逻辑电路,以避免程序运行死锁或跑飞导致负载电机飞车。
电流检测选用霍尔电流传感器LTSR6-NP,将传感器测得的电压信号经放大器的比例电路和电压跟随后进入DSP的AD转换通道[2]。
位置检测选用AD公司的AD2S83将旋转变压器信号转换为数字信号送入DSP中[6]。本系统需要2片AD2S83,采用CPLD作为AD2S83和DSP之间的接口芯片,用CPLD来控制AD2S83的BUSY信号。当DSP不需要读取数据时,GPIO置为高电平,每一个BUSY的下降沿将每次转化后的角度锁存到CPLD中。当DSP需要读取各通道的数据时,首先把GPIO置为低电平,禁止CPLD中锁存器内容变化,然后分别读取每个锁存器的数据,不需要加入任何等待状态,提高了控制系统的实时性,只需读完以后再把GPIO置为高电平即可[6]。
采用数字式温度传感器DS18B20通过一个IO口与DSP连接,通过软件编程按照一定时序读出12bit数字量表示的温度信息,作为PID参数调节的依据。
3 软件设计与实现
3.1 控制算法设计
从通常意义上来理解,相同PID参数情况下,恒速段位置跟踪误差与传动机构摩擦转矩有关。而在加减速段,位置跟踪误差不仅与传动机构中摩擦转矩有关,还与伺服电机转子轴上转动惯量的大小有关。而提高转动惯量的加减速能力,就必须增加转矩大小,或增加转矩命令信号的提前量,也就是转矩前馈[7]。基于以上考虑引入了速度前馈和转矩前馈。
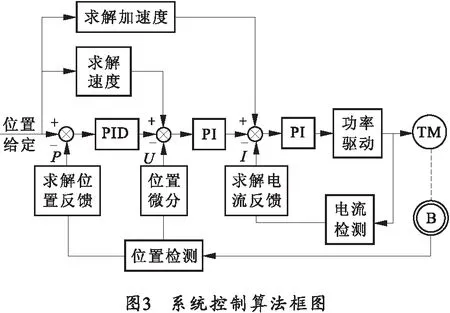
三闭环控制器结构如图3所示[8]。在电流环和速度环均采用增量式PI调节,在位置环采用增量式PID调节,速度前馈作用在速度闭环的给定信号上,同时命令信号中的加速度信息(即转矩前馈信号)作用到转矩闭环给定信号上。电流环每1个PWM周期、速度环每20个PWM周期、位置环每200个周期可调节1次。
为使系统适应宽温度范围,克服高低温时不同的摩擦力,避免参数变换时瞄准镜出现抖动,本设计引入了温度系数A(t),A(t)=t/T,其中,T为常量,是常温温度,本文取值25,t为变量,为数字测温芯片测出的实际温度。在每个环节的PID参数前均加有温度系数,当温度低于设定温度时,温度系数起到调整PID参数的作用。同时,系统对三环的最大输出均进行了限制。限制电流环主要是限制PWM输出,保护电机不受损坏,限制速度环主要是为了减小系统振荡,限制位置环主要是为了避免瞄准镜撞限。
3.2 参数整定
PID参数决定系统性能的好坏,本系统在参数调试界面中读取系统给定、回路输出和两者之间的误差曲线,依靠分析比例、积分、微分的基本性质,判读趋势图中比例、积分、微分的基本曲线特征,从而对PID参数进行整定。
参数整定时遵循的基本原则是:把三闭环调节系统孤立成3个单回路;先整定电流环回路,再整定速度环和位置环回路,再全面考虑;在各回路调节时,把P、I、D 隔离开来,先去掉积分、微分作用,让系统变为纯比例调节方式,然后再考虑积分,最后再考虑微分;设置前馈信号和反馈信号系数,及时调整系数,避免因前馈信号和反馈信号过强造成系统振荡。
在实际调试中,速度环参数对系统影响较大,电流环参数调好后可基本不动。每次整定时,可将速度环作为主调回路,位置环作为副调回路,主调的比例弱,积分强,以消除静差;副调的比例强,积分弱,以消除干扰。
3.3 系统软件实现
系统控制软件包括主程序和中断服务子程序。程序流程框图如图4所示。
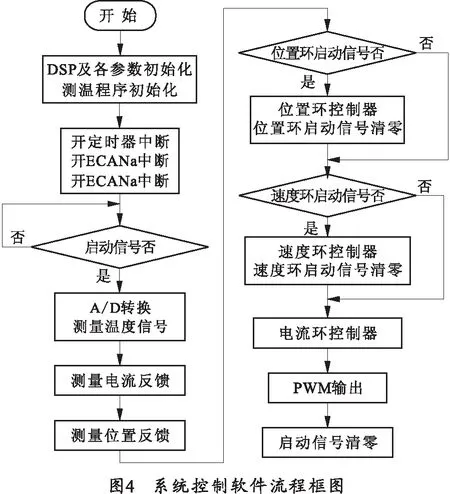
主程序主要完成DSP初始化、开中断后等待启动信号。当启动信号到达后进行AD采集,温度采集,RDC转换,获取电流反馈和位置反馈的数据,进入位置环调节器、速度环调节器和电流环调节器,最终产生PWM信号隔离后输出至驱动电路,启动信号清零后等待下一次循环。在定时器中断中开启启动信号。在ECANa中断中等待火控计算机主令并回发火控计算机所要求的信号。在ECANb中断中等待PC机主令并回发PC机所要求的信号。
PC机交互界面是基于周立功公司的USBCAN-2A智能接口卡的接口函数用Delphi开发而成。它能接收DSP发出的随动系统数据,并且能够把所需数据用实时曲线绘制,能把数据保存到excel表格中;能根据选择给DSP发送常用的调试信号,让系统在指定信号下运行,观测其各项指标,了解系统性能,更好的对系统进行监控,对系统参数改进提供依据。
4 试验结果
用阶跃信号、三角波信号和正弦信号作为系统输入信号测试伺服系统的性能。试验结果如表1所示。从试验结果可以看出,系统静态误差小,稳态精度高,对含有加速度和加加速度信号的正弦信号的跟踪误差也满足指标要求。系统具有良好的静、动态性能,并具有很好的实时性和较好的可靠性。
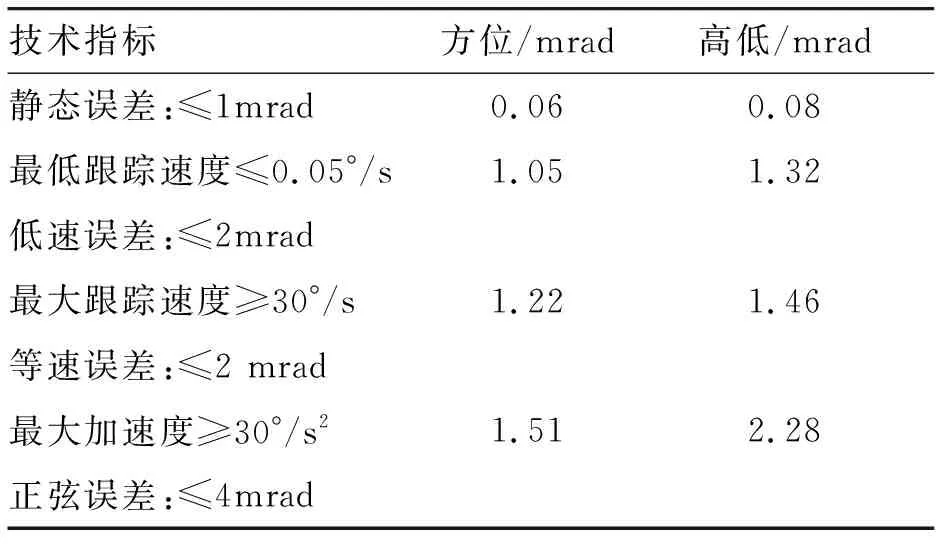
表1 伺服系统跟踪精度
5 结 论
笔者提出并研究了高性能瞄准装置伺服系统,利用TMS320F28335高速浮点运算能力、丰富的外围接口和CPLD强大的逻辑功能,大力简化了系统电路设计,提高了系统可靠性,并通过软件实现了控制算法和交互界面程序。在实际应用中,系统采用的带速度前馈和转矩前馈的三闭环带温度系数的增量式PID控制策略使系统获得了较高的跟踪精度和优良的动态品质,系统工作指标完全满足要求。
[1] 贾建辉.基于DSP的天线伺服控制器设计与实现[D].哈尔滨:哈尔滨工业大学,2011.
JIA Jian-hui.Design and implementation of antenna servo controller based on DSP[D].Harbin: Harbin Institute of Technology,2011.(in Chinese)
[2] 胡瑛.数字化瞄具伺服系统的研究[D].西安:西安工业大学,2009.
HU Ying.Study of digital servo control system[D].Xi’an:Xi’an Technological University,2009. (in Chinese)
[3] Texas Instruments Incorporated.TMS320C28X系列DSP的CPU与外设[M].北京:清华大学出版社,2004.
Texas Instruments Incorporated.TMS320C28X DSP CPU and peripherals[M].Beijing:Tsinghua University Press,2004.(in Chinese)
[4] 代普.基于DSP控制的全数字转台直流伺服系统研究[J].电气传动自动化,2008,30(6):15-18.
DAI Pu.Research on fully-digital DC servo system of rotational equipment based on DSP control[J].Electric Drive Automation, 2008,30(6):15-18.(in Chinese)
[5] 李庆申,娄晓光,李桂花,等.基于TMS320F2812的运动控制系统应用[J].电子测量技术,2007,30(9):87-89.
LI Qing-shen,LOU Xiao-guang,LI Gui-hua,et al. Application of motion control system based on TMS320F2812[J].Eclectic Measurement Technology,2007,30(9):87-89.(in Chinese)
[6] 袁保伦,陆煜明.基于AD2S82A的多通道测角系统及与DSP的接口设计[J].仪表技术与传感器,2007(3):54-55.
YUAN Bao-lun,LU Yu-ming. Multi channel angle measuring system based on AD2S82A and it’s interface circuit design with DSP[J]. Instrument Technique and Sensor, 2007(3):54-55.(in Chinese)
[7] 滕福林,李宏胜,葛红宇,等.伺服系统中一种新型前馈控制结构的研究[J].电气传动,2012,42(2):61-64.
TENG Fu-lin,LI Hong-sheng,GE Hong-yu,et al. Design on a novel feed forward control structure in servo system[J].Electric Drive,2012,42(2):61-64.(in Chinese)
[8] 刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
LIU Jin-kun.Advance PID control MATLAB simulation[M].Beijing: Publishing House of Electronics Industry, 2007. (in Chinese)
