基于刚柔耦合的某弹药供输机构振动分析
2013-11-21钱林方石海军陈光宋
陈 灿,钱林方,石海军,陈光宋
(南京理工大学 机械工程学院,江苏 南京 210094)
随着火炮技术向着高速、轻量化和自动化方向发展,火炮各部件的冲击载荷不断加大,火炮供输弹机的振动响应愈加剧烈,目前正成为一个亟待解决的问题。由于振动引起的供输弹机动态精度丧失、构件疲劳破坏等问题时有发生,供输弹机的振动问题必须得到足够的重视。分析供输弹机的振动规律,以可靠地对振动进行控制,最大限度地消除和抑制振动,提高供输弹机精度和寿命,逐渐成为供输弹机设计的一个重大理论和实践问题[1]。
供输弹机是火炮完成连续射击的重要部件,供输弹机的传送和定位精度在一定程度上影响着火炮发射的精度。随着射速的不断提高,火炮供输弹机各部件的运动速度不断增加,振动响应也愈加增强,在进行动力学分析时,考虑弹药供输机构重要部件的柔性,可使动力学仿真更加接近实际情况,以获得更加准确的仿真结果[2-3]。
1 弹药供输机构工作原理
如图1所示,弹药供输机构主要由四连杆回转机构4、5、7、8、输弹盘3、输弹板11和输药板10组成。总体坐标系选用标准笛卡尔坐标系,x方向为重力方向,四连杆在yOz平面作旋转摆进摆出运动,输弹盘在xOz平面作旋转运动。
机构供弹供药时,弹药1、2同时脱离协调臂落入输弹盘3,油缸A驱动四连杆机构摆进60°,将弹药送达炮尾,同时油缸B驱动输弹盘3旋转,使弹丸对准炮膛,输弹板推动弹丸进行输弹;输弹结束后,输弹盘再次旋转,使模块药对准炮膛,输药板推动模块药进行输药动作。输弹输药动作结束后,四连杆机构空载回转复位,动作结束。摇架5固定在炮身架体上,通过改变摇架5的高低角可改变供输弹机射角。
2 刚柔耦合系统动力学仿真
2.1 基本假设
1) 所有铰链约束均为理想铰链约束,不考虑四连杆连接处的间隙。
2) 摇架5视为直接固定在大地上,忽略架体振动变形影响。
3) 弹药从协调臂中解脱落入输弹盘,简化为t=0 s时弹药同时从h=50 mm高度自由落体至输弹盘中。
4) 只考虑四连杆的柔性,其余部件均视为刚体,不考虑弹性变形。
5) 弹药与输弹盘的接触为弹性碰撞,等效为弹簧阻尼模型。
2.2 刚柔耦合模型建立
根据弹药供输机构工作原理,在基本假设条件下,建立弹药供输机构ADAMS虚拟样机模型。四杆两端均以理想铰链约束,摇架与大地固定;连杆与输弹盘为铰链约束,弹药与输弹盘之间定义接触。输弹板与弹丸、输药板与模块药之间也定义接触。
2.2.1 柔性体的导入
柔性部件通过以下步骤导入:对结构进行网格划分,通过有限元软件进行模态分析计算并得到mnf模态中性文件以及通过ADAMS/Flex模块导入。
由于四杆的结构都十分复杂,为得到较高质量的网格,提高计算精度,本文选用Hypermesh软件进行精确的网格划分,网格类型为solid45。图2为划分网格后的连杆模型。其余三杆模型略。
设置单元类型、材料属性等参数后,通过cdb文件导入ANSYS中分别对四连杆模型进行模态分析。使用ANSYS软件的输出接口生成包含四连杆材料属性、质量、转动惯量、各阶模态频率及振型的mnf模态中性文件。由于四连杆的铰接中心为孔,所以需设置必要的刚性区域,选择内孔上所有节点作为从节点,孔中心为主节点。将主节点选择为输出的maker点,通过ADAMS/Flex导入ADAMS/View中,进行刚柔耦合动力学仿真分析。
2.2.2 仿真动作及参数设置
模型共需4个驱动:四连杆回转驱动、输弹盘翻转驱动、推弹板推弹驱动和推药板推药驱动。本文采用理想位移驱动。驱动函数全部使用step函数编译。驱动的时间顺序用图3表示。

弹药与输弹盘间均为旋转体弹性接触,为得到比较精确的结果,本文通过公式计算得出各参数值。
刚度系数计算公式为[4]:
应当指出的是,ADAMS处理器使用Impact非线性函数计算接触力,刚度系数的量纲与碰撞指数有关,当e=1.5时,ki的单位为N/mm1.5。
3 仿真结果分析
设置仿真时间为5 s,步长为0.01 s,以射角θ=0 mil,落弹高度h=50 mm进行仿真。使用ADAMS/PostProcessor观察仿真结果发现,振动响应集中在四连杆机构。依旧以连杆为例,观察运动过程中振动响应情况。查看连杆在x、y、z方向的振动位移,发现位移主要集中在x方向,y、z方向的位移幅值较小,可以忽略。连杆质心在x方向的位移曲线见图4。
由图4可知,将四连杆考虑为柔性后,所得结果与刚体系统运动规律一致,但柔性系统产生较明显的振动,其中振动最大处为落弹阶段(0
3.1 落弹阶段
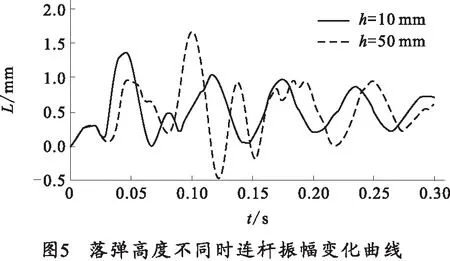
落弹阶段,在x方向的振动响应比较明显,最大振幅达到2.13 mm。为使振动响应效果更加直观,对振动响应曲线进行了清零处理,如图5所示。
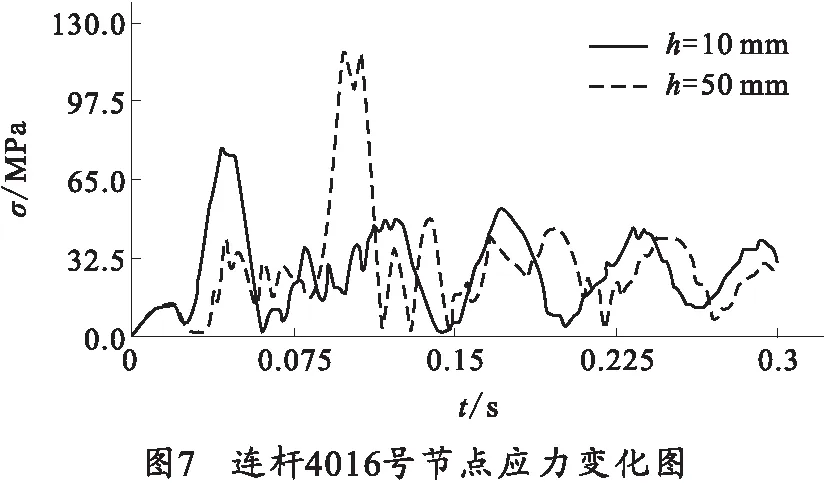
使用ADAMS/durability模块查看结果[5],发现最大应力节点4016号节点分布在连杆肋板与杆身连接处,如图6。最大应力节点应力变化曲线如图7,最大应力值为118.06 MPa。由图可知,最大应力出现在弹丸落入输弹盘的瞬间。

弹丸落入输弹盘之前与输弹盘侧壁有摩擦和接触,导致连杆产生低幅振动和应力。落弹阶段的大幅振动主要是由于受到弹药落入输弹盘时的冲击载荷。可见四连杆所受应力的大小与臂端受到的冲击载荷大小有直接关系,而弹丸落入输弹盘之前与输弹盘侧壁之间的摩擦碰撞对其影响不大。
3.2 输弹阶段
输弹阶段的振动也主要集中在x方向。输弹阶段连杆最大振幅0.71 mm,连杆最大应力点最大应力为44.37 MPa。由于四连杆机构刚刚结束带载回转运动而尚未稳定,加之输弹板的输弹速度达到3 m/s以上,而弹丸重达22 kg,所以输弹过程中弹丸与输弹盘之间的摩擦碰撞成为整个机构振动的主要原因。
3.3 终止阶段
终止阶段的振动主要集中在z方向,即四连杆回转方向,最大振幅0.69 mm,连杆最大应力点最大应力为45.22 MPa。终止阶段的振动主要由于空载回转停止后,四连杆的急停产生较大反向加速度,激励柔性四连杆产生较大振动响应。
4 参数化分析
4.1 冲击载荷对系统振动响应的影响
保持模型参数不变,将弹丸高度由h=50 mm降至h=10 mm,再次进行仿真实验,测量得落弹阶段最大振幅减小为1.37 mm,如图6。连杆4016号节点最大应力值减小到78.2 MPa,如图7。由此可知,降低弹丸高度,可减小冲击载荷,十分有效地减小冲击振动响应,同时相应地减小应力。
4.2 考虑弹丸卡膛一致性对系统振动响应的影响
弹药装填时需要考虑弹丸卡膛一致性。为达到输弹可靠的要求,输弹卡膛速度必须达到2.5~3 m/s。所以不同射角下,弹丸的初始速度不同,即要求推弹板的速度不同。某型火炮不同高低射角下供弹速度如表1所示[6]。本文对不同射角下由输弹引起的整个机构的振动进行了分析。
保持其余参数不变,根据表格数据对不同高低射角下的供弹供药系统进行动力学仿真,得到的振动规律基本一致,最大振幅值如表2所示。由表可知,随着射角的增大,供弹系统的振动响应呈现先变大后变小的趋势,其中射角为500 mil时响应最大。因此在考虑振动控制时,需重点考虑射角为500 mil时的控制效果。

表1 某型火炮不同高低射角下供弹速度

表2 某型火炮不同高低射角下连杆最大振幅
5 结 论
本文基于ADAMS及有限元分析软件对供输弹机系统协调臂部分进行了刚柔耦合动力学系统建模及分析,得到了协调臂四连杆机构在供弹过程中的运动情况及应力分布情况,分析了四连杆机构在落弹、输弹和终止时的振动响应情况,并进行了参数化分析,得出如下几点结论:
1)落弹时四连杆所受应力的大小与臂端受到的冲击载荷大小有直接关系,应采取必要措施,尽量减小落弹时的冲击载荷。
2)不同高低射角下弹药供输机构的振动响应不同,射角为500 mil时振幅最大。因此需对输弹速度进行合理的算法控制,减小输弹引起的系统振动。
3)空载回转时需要进行必要的速度控制,或添加合理的缓冲装置,以减小停转后的振动响应。
刚柔耦合系统动力学建模仿真虽然比多刚体系统建模更加复杂,但仿真结果更加接近实际状况,不仅考虑到部件柔性对系统振动效果的影响,同时还能查看动载荷作用下各部件的应力分布情况,为供输弹机系统的设计或供输弹机系统设计的合理性检验提供重要的参考依据。
[1] 朱怀亮,张福祥.刚柔耦合下火箭炮多体系统的动力建模方法探讨[J].火炮发射与控制学报,1995(2):8-13.
ZHU Huai-liang,ZHANG Fu-xiang.Investigation on launcher multi-part system dynamic modeling under rigid and flexible coupling condition[J]. Journal of Gun Launch&Control,1995(2):8-13.(in Chinese)
[2] 熊光楞,李伯虎,柴旭东.虚拟样机技术[J].系统仿真学报,2001,13(1):114-117.
XIONG Guang-leng,LI Bo-hu,CHAI Xu-dong. Virtual prototyping technology[J].Journal of System Simulation,2001,13(1):114-117.(in Chinese)
[3] 侯保林,樵军谋,刘琮敏.火炮自动装填[M]. 北京:兵器工业出版社,2010.7.
HOU Bao-lin,QIAO Jun-mou,LIU Cong-min.Automatic gun feeding[M].The Publishing House of Ordnance Industry,2010.(in Chinese)
[4] 谢最伟,吴新跃.基于ADAMS的碰撞仿真分析[C]. 第三届中国CAE工程分析技术年会论文集,大连:347-350.
XIE Zui-wei,WU Xin-yue.ADAMS based simulation analysis on impaction[C].Paper Compilations on The 3rd China CAE Analysis Technology Annual Conference,Dalian:347-350.(in Chinese)
[5] 刘晓峰,王殿龙,滕儒民,等.基于刚柔耦合的起重机柔性臂动力学分析[J]. 起重运输机械,2011(9):50-53.
LIU Xiao-feng,WANG Dian-long,TENG Ru-min,et al.Rigid-flexible coupling based dynamic analysis on flexible boom of crane[J].Hoisting and Conveying Machinery,2011(9):50-53.(in Chinese)
[6] 石海军,钱林方,徐亚栋,等.火炮卡膛一致性问题研究[J]. 弹道学报,2012(4):77-81.
SHI Hai-jun,QIAN Lin-fang,XU Ya-dong,et al.Research on consistency of bayonet-chamber of gun[J].Journal of Ballistics, 2012(4):77-81.(in Chinese)
