卫星偏置动量轮3D模型的优化设计与有限元分析
2013-11-03陈金国孙小娟
陈金国, 孙小娟, 田 操
(1.黑龙江科技大学 机械工程学院, 哈尔滨 150022; 2.中国科学院 研究生院, 北京 100039)
卫星偏置动量轮3D模型的优化设计与有限元分析
陈金国1,孙小娟2,田操1
(1.黑龙江科技大学 机械工程学院, 哈尔滨 150022; 2.中国科学院 研究生院, 北京 100039)
为提高卫星姿态控制系统的精度、寿命以及确定卫星合理的有效载荷和性能指标,提出了偏置动量轮整体优化设计方案。通过三维实体建模软件Pro/E建立轮体、壳体的密封罩和底座的简化几何模型,依据动量轮轮体和壳体的特性与设计要求,建立动量轮整体优化设计的数学模型;利用Matlab软件中fmincon和fminimax函数分别进行偏置动量轮整体优化设计计算。结合优化结果对结构尺寸进行适当调整,取动量轮半径为81 mm,轮缘高度和宽度分别为24、6 mm,轮辐高度和宽度分别为21、6 mm,轮体内环倒圆和外环倒圆为20、5 mm,壳体厚度为1 mm。经有限元分析验证后轮体的静态和动态性能均达到了指标要求,体积减小了15%。
卫星; 动量轮; 3D优化设计; 有限元分析
0 引 言
卫星是航天系统的重要组成部分。其性能主要由飞行轨道和姿态控制这两种因素决定,而动量轮作为卫星姿态控制系统的重要执行元件,决定着卫星能否正常在轨运行。因此,从制定卫星合理的有效载荷、性能指标和提高卫星应用寿命而言,合理的动量轮结构尤为重要[1-2]。偏置动量轮整体优化主要从总质量和总体积最小化这两方面进行考虑,动量轮由飞轮轮体、轴承及润滑系统、驱动电机和飞轮壳体组成[3]。基于对动量轮组成的分析,将轮体和壳体的总质量最小化作为偏置动量轮的整体优化目标函数。由美国关于飞轮的大量统计数据以及对应轮体和壳体质量与轮体半径的关系曲线分析[4],空间飞轮的总质量最小值所对应的轮半径接近轮体和壳体质量交点,且在总质量曲线中质量最小值附近轮体半径变化平缓。因此,在设计飞轮时认为交点处半径是飞轮的最佳半径。笔者采用Pro/E软件分别建立轮体、壳体上盖、壳体底座的简化几何模型,分析了轮体、壳体密封罩、壳体底座的几何参数的相互关系,构建偏置动量轮整体优化的数学模型,采用Matlab软件中的优化工具箱(Optimization toolbox)[5]的优化函数fmincon和fminimax分别对偏置动量轮进行整体优化计算,并采用有限元软件验证其可行性。
1 几何模型
偏置动量轮轮体结构拓扑优化设计表明,动量轮的轮体拓扑最优形式为具有四根工字梁截面辐条[6]。考虑到工程中常用矩形截面以及建模计算的方便等因素,提出将轮体设计为矩形截面的辐条方案,优化设计的轮体简化几何模型,如图1a所示。壳体主要由底座和密封罩组成,其设计的合理性直接影响动量轮性能的稳定性,进而影响卫星的稳定性。密封罩必须具有高承载效率,否则会导致密封罩失效、影响飞轮系统的正常工作。因此,研究厚度对密封罩性能的影响、优化密封罩的结构设计,使壳体结构性能达到最佳且质量最小尤其重要。因折边浅碟形具有较好的强度和合适的尺寸,故动量轮壳体设计形状为传统的浅碟形,如图1b、c所示。
2 整体优化的数学模型
分析动量轮轮体与壳体的结构、受力特性,建立动量轮整体优化的数学模型,对轮体的轮缘、轮辐和浅碟形壳体分别进行优化计算[7]。
2.1变量参数的选取
轮体的简化几何模型如图1a所示。由偏置动量轮轮体拓扑优化研究可知[6],轮体的优化区域是轮缘和轮辐,而且轮体半径是整体优化的重要参数。因此,轮体上设计轮体半径x1、轮缘的宽度x2、高度x3以及轮辐的宽度x4、高度x5五个参数。壳体的简化几何模型如图1b、c所示。壳体的主要失效形式是屈曲破坏,即壳体失稳,指壳体在载荷作用下,壳体内部应力在远未达到材料的强度失效的情况下,突然产生较大的位移而使结构降低承载能力,甚至发生破坏[8]。故壳体主要参数就是浅蝶形壳体厚度。由此,选取x1、x2、x3、x4、x5、x6作为动量轮整体优化的设计变量,即X=[x1,x2,x3,x4,x5,x6],六个变量如图1中所示。

图1 动量轮整体优化简化几何模型
2.2目标函数的确定
为使动量轮总体质量最小,建立目标函数,则偏置动量轮整体优化的数学模型为
m=m1+m2,
(1)
式中:m——轮体和壳体的总质量,kg;
m1——轮体总质量,将分为轮缘和轮辐这两部分进行质量计算,kg;
m2——壳体质量,将分为浅蝶形上壳体和壳体底座这两部分进行质量计算,kg。
将式(1)变换为
m=ρ1V1+ρ2V2,
(2)
式中:ρ1、ρ2——不锈钢的密度和硬铝的密度,分别取7.9×103和2.785×103kg/m3;
V1——轮体体积,V1=V11+V12,V11和V12分别为轮缘和轮辐的体积,计算体积时将每根轮辐简化为一个长方体计算,m3;
V2——壳体体积,V2=V21+V22,V21和V22分别为浅蝶形上壳体体积和底座体积,m3。
2.3约束条件的确定
约束条件分为轮体和壳体两部分。
2.3.1偏置动量轮轮体
(3)

n——设计变量的数量,对于矩形截面辐条轮体,n=7;
Jp、Jd——极惯性矩和赤道惯性矩,kg·m2;
[σ1] ——许用应力,MPa;
f1——轮体的一阶弹性振动频率,Hz。
受动量轮的加工、安装条件和自身的结构条件的约束,则设计变量的下界和上界分别为bl=[70,1,5,10,5,5],bu=[90,3,15,30,20,30]。
2)学生自身的观念的树立与培养。由于我国高职院校的教育目标是为了培养高素质应用技术型人才,在很长一段时间之内,采用的都是以教师为主导的灌输式教学,通过这种方式学生虽然能够学习到一定知识,但是常常采用死记硬背的形式,形成的也是短期记忆,更不会灵活运用,其理论与实际结合的效果差,并且严重阻碍了学生创新能力与主观能动性的发挥。由此学生应在教师的引导之下利用自身优势资源更加深入的进行知识积累,提升学习主动性。
轮体的转动惯量主要由轮缘来提供,以轮缘的极惯性矩和赤道惯性矩作为整个轮体的极惯性矩Jp和赤道惯性矩Jd,则


(4)

(5)
当轮体旋转时,轮缘中会产生动应力σ1。通过对偏置动量轮轮体优化设计[6]可知,轮体在轮缘、轮辐与轮缘、轮辐与轮毂的交接处这三处所受的应力较大。计算这三处应力。
当动量轮在最大转速下旋转时,轮缘中所产生的动应力最大,则


ωmax——最大角速度。
当轮辐和轮缘交接处,假设把相邻两根辐条所夹持的轮缘部分看成是一根受均匀载荷的、两端固定的直梁,则该梁中除去离心力产生的动应力外,还有均匀分布载荷产生的弯曲应力,则弯曲应力为

M1——辐条支撑点产生梁的最大弯矩;
Wm1——支撑点部位的抗弯截面系数。
当轮辐和轮毂交接处,交接处所受的应力为

式中:m0——轮缘的质量;
g——重力加速度;
a——轮体谐振点环境振动加速度幅值为g的倍数;
q——谐振放大因数;
r——轮毂半径;
M2——轮辐根部引起的弯矩;
Wm2——辐条的抗弯截面系数。取最大值作为约束条件,即σ1=max{σ11,σ12,σ13}。
通过轮体的模态分析[6]可知,其一阶弹性振型为轮体绕两个赤道轴的轴向偏摆,因此,约束条件中的f1为轮体的轴向固有频率。计算振动过程中轮辐的最大位能和最大动能是通过将轮辐等效为一端固定、另一端支撑的一根悬臂梁,等效计算悬臂梁系统的最大位能和最大动能[2]。假设轮缘质量m0为均匀分布在各辐条自由端的集中载荷,则振动过程中这一载荷所具有的最大动能为T1;假定每根轮辐质量均匀分布在辐条全长上,则每根轮辐的最大动能为T2,如图2所示。轮辐的最大位能和最大动能。

图2 轮辐等效受力
(6)
式中:F0——悬臂梁所受惯性力,N;
A——最大静挠度,m;
E1——轮辐材料的弹性模量,GPa;
I——轮辐截面绕垂直于轴向的惯性矩,m4;
l——轮辐长度,按l=R0-r计算,m;

mb——每根轮辐质量。
令U=T1+4T2,则固有频率

2.3.2壳体
壳体部分主要约束条件是浅蝶形壳体抵抗大气的压力和应力等,体现在其抗屈曲能力和强度要求,则约束条件
(7)
式中:pc——临界屈曲载荷,Pa;
k——安全系数,根据经验取k=3;
σ2——密封罩承受的最大应力,MPa;
[σ2] ——密封罩的许用应力,MPa。
在计算密封罩承受的最大应力时,将浅碟形壳体的应力分析和最小厚度作为球形壳受均布外压力的情况来处理,如图3所示。根据S.P.Timoshenko的分析推导[9],若一球形壳承受均布的外压力时,可能保持其球形而只受均匀压缩。对于这种情况,均匀压应力为

(8)
式中:pi——中间面每单位面积内的压力,MPa;
r——球的半径,m;
x6——壳体的厚度,m。
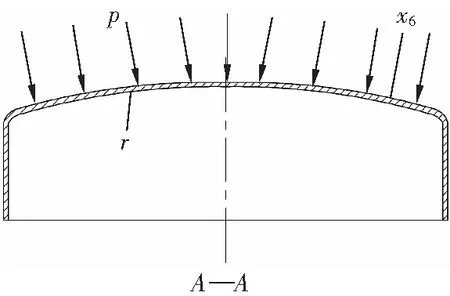
图3 浅碟形壳体受力
壳体首先要满足强度要求,即为σ2≤[σ2];此外,如果这个压力超过某一极限,受压的壳体球形的平衡形态可能变为不稳定,即发生屈曲。由于弹性稳定性而产生扁塌的理论压力或理论厚度为


(9)
式中:E2——壳体材料的弹性模量,GPa;
μ——壳体材料的泊松比。
通过以上对偏置动量轮轮体和壳体的变量参数的选取、目标函数的确定以及约束条件的参数的分析与计算,得到动量轮整体优化的数学模型为
minM=M1+M2,

4.093×10-3kg·m2≤Jp≤4.143×10-3kg·m2,
1.4≤Jp/Jd≤2,
σ1<[σ1],
f1>1 400 Hz,
pi≥k×1.01×105Pa,
σ2≤[σ2]。
3 结果与分析
3.1整体优化MATLAB结果
应用Matlab软件,编制动量轮整体优化设计程序。利用随机数生成设计变量的初始值,采用单目标约束优化的fmincon函数和多目标优化的fminimax函数分别对偏置动量轮整体进行优化。其中,单目标约束优化的fmincon函数是以动量轮整体质量为目标函数,利用序列二次规划法、拟牛顿法、线性搜索法这三种搜索算法进行优化计算;而多目标优化的fminimax函数以轮体和壳体这两部分质量为目标函数,利用同样的算法进行优化计算。

由于转动惯量是按照轮缘计算,优化结果中动量轮转动惯量偏大,而且将辐条简化为悬臂梁计算出的轮体的固有频率偏大,因此,将轮缘和轮辐的质量做适当调整,减小轮缘质量,降低轮缘高度,适当加宽轮辐宽度。取动量轮半径为81 mm,轮缘高度和宽度分别为24、6 mm,轮辐高度和宽度分别为21、6 mm。另外,轮体内环倒圆大,外环倒圆小,这里取轮体内环倒圆R2=20 mm,外环倒圆R1=5 mm,壳体厚度取1 mm。
3.2整体优化的有限元分析结果
在ANSYS中建模,如图4a所示,得到优化后的动量轮轮体模型体积减小了15%,转动惯量为4.12×10-3kg·m2。静力分析(图4b)应力云图显示最大的应力是发生在轮辐和轮缘的交接处,为42.56 MPa,小于不锈钢许用应力441 MPa,符合初始的假设条件。模态分析得到一阶、二阶弹性频率1 496 Hz,振型为绕两个赤道惯性轴摆动(图4c、d),与初始设计一阶、二阶振型相同。

图4 整体优化后动量轮有限元模型及分析结果
4 结束语
通过分析动量轮的组成结构,得到动量轮的质量主要由轮体和壳体两部分组成。轮体半径是影响动量轮整体质量的重要因素,利用该因素将轮体和壳体统一起来。在动量轮轮体拓扑优化的基础上,寻求动力轮整体最优质量。所建立的轮体、壳体的密封罩和底座的简化几何模型和动量轮整体优化设计的数学模型,应用Matlab语言编制优化设计程序,采用fmincon和fminimax函数分别进行偏置动量轮整体优化设计计算。优化结果表明,这两个函数的优化结果相差很小。由于采用Matlab函数对简化模型进行优化得到的结果与实际轮体模型有一定差异,故需要根据分析结果对结构尺寸进行适当调整,确定动量轮的几何参数。
[1]姜维, 闵乐宁. 动量轮壳体的设计与分析[J]. 轴承, 2004, 36(12): 4-5.
[2]韩邦成, 虎刚, 房建成, 等. 50Nms磁悬浮反作用飞轮转子优化设计方法的研究[J]. 宇航学报, 2006, 27(3): 536-540.[3]钱勇. 高精度三轴稳定卫星姿态确定和控制系统研究[M]. 西安: 西北工业大学出版社, 2002.
[4]AUCLAIR G F. Advanced reaction wheel controller for spacecraft attitude control [J]. AIAA Guidance Control and Flight Mechanics, 1969, 10(14): 855-860.
[5]龚纯, 王正林. 精通MATLAB最优化计算[M]. 北京: 电子工业出版社, 2009.
[6]孙小娟, 刘波, 贾宏光. 基于静动态特性的偏置动量轮轮体结构优化[J]. 航空动力学报, 2009, 24 (11): 2538-2544.[7]SCHITTKOWSKI K. Numerical comparison of nonlinear programming algorithms for structural optimization[J]. Structural Optimization, 1994, 7(7): 1-19.
[8]刘书田, 陈秀华, 曹先凡, 等. 夹心圆柱壳稳定性优化[J]. 工程力学, 2005, 22(1): 135-140.
[9]TIMOSHENKO S P. Theory of elastic stability [M]. New York: McGraw-Hill, 1961.
(编辑晁晓筠)
Optimization design and finite element analysis on 3D model of satellite bias momentum wheel
CHENJinguo1,SUNXiaojuan2,TIANCao1
(1.College of Mechanical Engineering, Heilongjiang University of Science & Technology, Harbin 150022, China;2.Graduate School of Chinese Academy of Science, Beijing 100039, China)
This paper is motivated by the need for improving the precision and life of satellite attitude control system and determining the reasonable satellite payload and its performance indicators and proposes the design scheme for overall optimization of bias momentum flywheel system. The scheme consists of obtaining the wheel body, the seal cover of shell, and simplified geometric model of base design using 3D entities modeling software Pro/E, and developing a mathematical model for integral optimization design, based on the characters and design specifications of momentum wheel body and shell, and performing overall optimization design calculations to bias momentum wheels using the fmincon and fminimax functions in Matlab software. The reasonable adjustment of structure size, combined with the optimization results, justifies momentum wheel radius of 81 mm, height and width of the rim of 24 mm and 6 mm, height and width of the spokes of 21 mm and 6 mm, inner and outer radius of wheel body of 20 mm and 5 mm, shell thickness of 1 mm. The finite element analysis verifies that the wheel body, with the static and dynamic performance up to the indicator, has a reduction in volume of 15%.
satellite; momentum wheel; optimization design of 3D; finite element analysis
2013-05-16
黑龙江省教育厅科学技术研究项目(12531600)
陈金国(1985-),男,福建省莆田人,助教,硕士,研究方向:采煤机与模具设计,E-mail:chen-jinguo@163.com。
10.3969/j.issn.1671-0118.2013.05.012
V241.02
1671-0118(2013)05-0453-06
A
