混合动力商用车AMT挡位自学习控制技术优化
2013-10-29冒晓建祝轲卿唐航波王俊席
赵 力,冒晓建,祝轲卿,唐航波,王俊席
(上海交通大学 机械与动力工程学院,上海 200240)
变速器的电子控制是现代汽车电子化典型代表[1],其中电控机械式自动变速器(Automated Mechanical Transmission,AMT)是在传统手动固定轴式变速器的基础上,加装了电控离合器和选换挡执行机构,即用电机代替了驾驶员进行选挡、换挡和离合器分合动作,从而降低了驾驶疲劳强度,保证了行车安全,提高了舒适性。AMT系统不仅具有控制精度高的换挡品质,而且具有适应性好、污染小和改装成本低等优点。
AMT系统在实际车载动力换挡(变速器有转矩传递时)过程前,必须获得各个挡位位置数据,才能有效控制选换挡电机在车辆运行时能准确换挡,而各个挡位的位置数据需通过静态(变速器无转矩传递)时启动挡位自学习控制程序来获得。
由于AMT选换挡驱动电机输出轴到变速器驱动齿轮的尺寸链较长,每台AMT制造和装配存在差异,使用后的零部件磨损、松动及维修后的重装也会产生差异,所以不同变速器各挡位的位置有所不同,且同台变速器的位置也会相应变化。因此需要不断优化AMT挡位自学习控制技术来自动精确、高效地获得每台变速器各挡位坐标位置,实现精准良好的选换挡控制效果和减小在线自学习的等待时间,以满足快速、精准的换挡品质[2],进而满足AMT的智能控制[3],保证车辆运行安全。本文就是以此为目标,针对AMT静态时各挡位位置自学习控制策略,从挡位学习顺序、再次进挡学习策略和通过自整定PID技术进行自适应参数优化,开展AMT挡位自学习控制技术优化的研究。
1 AMT系统介绍
本系统采用的5个前进挡位变速器体,分为3层,即R-1挡层、2-3挡层和4-5挡层,选换挡机械原理简图及执行机构简图如图1和图2所示。AMT通过脉宽调制法控制选挡电机和换挡电机驱动,通过执行将电机旋转转换成所需选挡和换挡操作。当3个拨块在空挡时,通过控制选挡电机的占空比和旋转方向,带动换挡轴沿轴向运动进行选挡操作;当某个拨块到达互锁板换挡槽位置时,控制换挡电机的占空比和旋转方向,就可以进行相应挡位层的换挡动作,其中互锁板的存在确保了选换挡的唯一性。
如图1所示,利用选挡角位移传感器和换挡角位移传感器检测选挡和换挡情况,即本文用选/换挡角位移传感器输出的位置电压(mV)表示选/换挡位置。
2 挡位位置定义分析
根据变速器选换挡原理,将换挡轴的选挡直线运动和换挡旋转运动转化成X-Y二维“王”字平面运动[4],挡位位置信息如图3所示。空挡位置为xN=0.5(xNmin+xNmax)。在实际情况中,需要考虑到电机输出特性,且为了避免碰壁冲击,各挡位的目标位置并不是物理极限位置,而是在物理极限位置的基础上增加偏移量项,如1挡换挡极限位置为x1lim,偏移量为D1x;1挡选挡极限位置为y1lim,偏移量为D1y。则1挡的目标位置点坐标为: P1=(x1lim+D1x,y1min+D1y),而有偏移量的选/换挡电机电流分别为is和ic,选/换挡电机占空比分别为 Ps和Pc,挡位极限位置为ymin、xlim和ymax,选/换挡电机灵敏度分别为φc和φs。同理可得其它挡位位置。
3 挡位位置自学习控制技术优化
3.1 挡位自学习顺序优化
在AMT系统中,空挡位置的精确确定非常重要,因为每次选换挡都要经过空挡,若空挡位置有误或未能回到正确的空挡位置,则会造成换挡卡滞或不能换挡的严重后果。常规的AMT挡位自学习顺序是先学习空挡位置,再学习上层挡位位置、下层挡位位置、中间层挡位位置。
然而,经过试验发现,新装配的AMT系统因零部件之间未经过运动磨合,换挡阻力较大,影响空挡学习中换挡步长移动。在第1次挡位自学习过程中,空挡位置的左右偏差范围明显偏窄,见表1。第1次空挡宽度为434 mV,后3次的空挡宽度平均值为(682+702+674)/3=686 mV,与第1次差值252 mV,而后3次空挡宽度散差仅为28 mV。通过此学习数据比较,说明第1次学习的空挡位置的偏差很大,正确率很低。
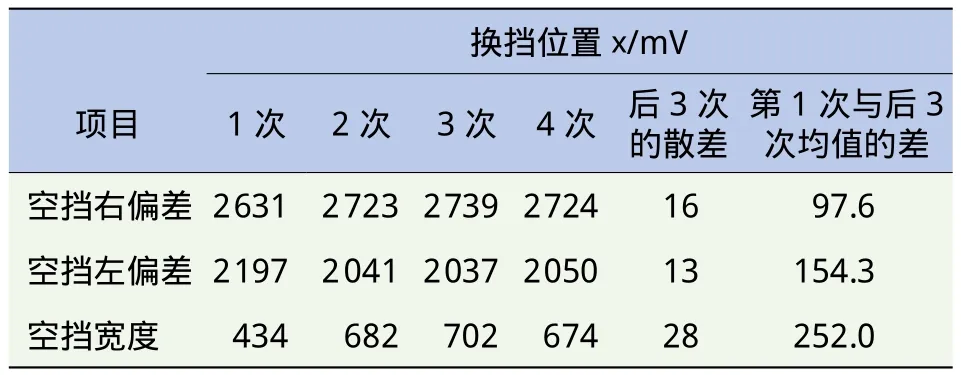
表1 优化前空挡位置自学习结果数据
为提高第1挡位自学习的准确性及效率,考虑改变挡位自学习顺序,如图4所示。通过先学习上层挡位位置,实现在空挡学习之前对换挡机构进行磨合以减小换挡阻力。
3.2 空挡自学习选挡自适应性优化
空挡位置的精确确定在AMT控制系统中最为关键,故空挡学习的时间相对其它挡位较长,但为了提高自学习效率,减少自学习时间,需要对空挡学习时间优化。因空挡位置的精确程度是由空挡位置的上偏差和下偏差确定的,都属于换挡值,故可以从选挡运动中得以优化。最初的自学习策略空挡位置学习时的选挡运动是定占空比运动模式,响应比较慢,结合当前成熟的控制技术[5-7],采用自整定PID控制会加快响应速度,节约时间,且控制柔和无冲击。
图5中r(k)、u(k)、y(k)分别为控制系统k时刻的输入量、控制量、输出量;e(k)为实时误差;Kp(k)、Ki(k)、Kd(k)分别为比例积分微分系数,由实时误差实时调整。数字PID控制式为
3.3 再次进挡学习策略
对于新装配的AMT系统,在第1次挡位位置自学习时因零部件之间未经过运动磨合换挡阻力较大,会影响挡位位置的准确性,一般需要多次学习校正。为提高第1次自学习的挡位位置值的准确性,减少多次学习以提高效率节省时间,提出了再次进挡学习策略,即在学习某挡位过程中,当学习挡位极限值成功后,进行回退学习功能,在回退学习成功后不及时回挡,而是再次进挡学习挡位位置值,两次进挡选取最佳值作为为此轮学习的挡位极限值。此策略避免了第2轮重复学习及校验合格挡位的时间,从而使挡位学习效率大大提升。
4 优化试验验证
4.1 挡位自学习顺序优化及一致性比较
优化前的挡位自学习是先学习空挡位置再学习上层、下层、中层位置,优化后是通过先学习上层挡位位置,实现在空挡学习之前对换挡机构进行磨合以减小换挡阻力,从而提高空挡左右偏差位置的学习准确性。优化前后检测图如图6和图7所示,第1次自学习挡位的准确性及一致性比较见表1和表2。
比较图6和图7中的学习时间可得到,优化前总体自学习时间可由图6中时间轴看出,即134.16-8.52=125.64 s,优化后总体自学习时间可由图7时间轴看出,即112.81-22.13=90.68 s,故优化后每轮自学习能够节约时间125.64-90.68=34.96 s,由此可见优化方法能够缩短自学习时间,提高自学习效率。
通过比较表2和表3中的数据可以看出,优化前的后3次自学习的散差最大值为16,明显大于优化后的最大散差值4;优化前第1次自学习值误差较大,与后3次均值之差最大值为204,而优化后第1次自学习值误差较小,与后3次均值之差最大为8,由此可得出优化方法能够提高自学习的一致性及第1次自学习的准确性。

表2 优化前自学习结果数据统计
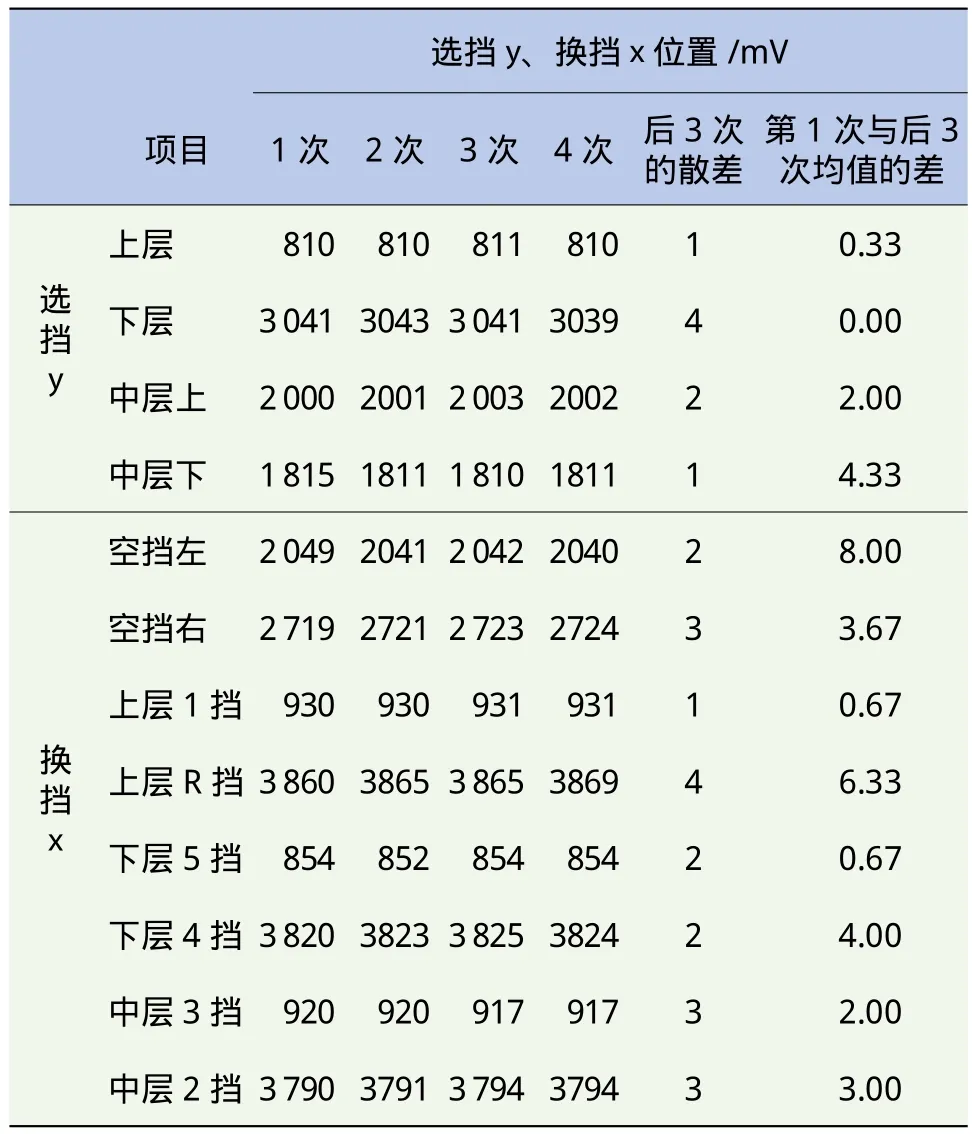
表3 优化后自学习结果数据统计
4.2 空挡自学习选挡自适应性优化
为对比空挡自学习选挡自适应性优化效果,将优化前空挡学习检测图和优化后检测图列出,如图8和图9所示。从两图的时间轴中可看出优化前后选挡每循环运动的时间,对比见表4。
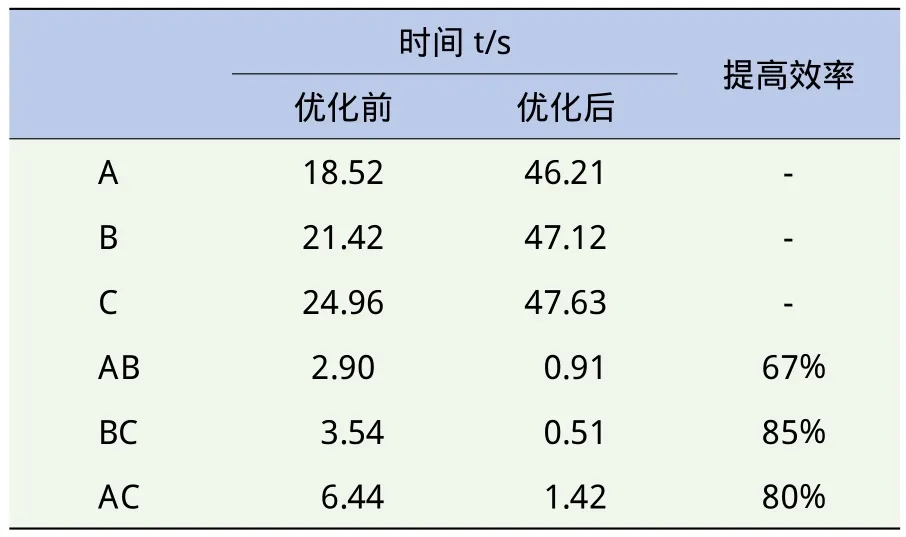
表4 优化前后空挡选挡时间对比
从图8和图9中可以看出空挡学习过程中选挡运动的比较。由表4可以看出,优化后选挡上下一次的时间AC为1.42 s,比优化前AC时间6.44 s少了5.02 s,效率提高了80%,从而使优化后自学习时间大大节约,减少了自学习的等待时间。
4.3 再次进挡试验验证
从图10的圆圈处可以看出,选挡处于最大位置,换挡也处于最大位置附近,即为4挡学习检测图,圆圈中第1次进挡位置为A(3 750 mV)处,因AMT机构装配后零部件之间未经过运动磨合,换挡阻力较大,进挡深度不够。经过回退学习后,第2次进挡为B (4 013 mV)点,明显比A点深,经过多次学习验证4挡最深即4 013 mV,深度增加了19%,由此说明了二次进挡的必要性及有效性。
5 结论
(1)本文通过对挡位自学习优化,缩短了挡位自学习时间,提高了挡位自学习的一致性以及第1次自学习的准确率,从而提高了挡位自学习的整体效率。
(2)利用自整定PID控制技术对空挡挡位自学习过程中的选挡运动进行控制,通过优化前后比较,结果表明空挡挡位学习时间大为缩短,提高了学习效率。
(3)再次进挡学习功能,减少了对挡位位置的重新校核,提高了挡位位置学习值的正确性。
总之, 对AMT挡位自学习控制策略的优化,提高了挡位自学习成功率、效率和一致性。
References)
[1]何忠波,白鸿柏. AMT技术的展望[J]. 农业机械学报,2007,38(5):181-186.He Zhongbo,Bai Hongbai. Automatic Mechanical Transmission Technique Development Actuality and Expectation[J]. Transaction of the Chinese Society for Agricultural Machinery,2007,38(5):181-186. (in Chinese)
[2]葛安林,沈波. AMT换挡品质的研究[J]. 汽车技术,2003(3):43-45.Ge Anlin,Shen Bo. Study on AMT Gear Shifting Behavior [J]. Automobile Technology, 2003(3):43-45.(in Chinese)
[3]李勇,常思勤,魏英俊. AMT选换挡机构自学习控制策略研究[J]. 汽车工程,2010,32(10):878-882.Li Yong,Chang Siqin,Wei Yingjun. A Study on the Self-Learning Control Strategy for AMT Shift Actuator [J].Automotive Engineering,2010,32(10):878-882.(in Chinese)
[4]杨志刚,曹长修,黄建明.智能控制技术在汽车AMT中的应用[J]. 重庆交通学院学报,2002,21(4):110-113.Yang Zhigang,Cao Changxiu,Huang Jianming. Application of Intelligent Control Methods in Automobile AMT System[J]. Journal of Chongqing Jiaotong University,2002,21(4):110-113. (in Chinese)
[5]余天明,郑磊,李颂.电控机械式自动变速器离合器灰色预测PID控制技术[J]. 农业机械学报,2011,42(8):1-6.Yu Tianming, Zheng Lei,Li Song. Gray Prediction PID Control Technology of Automated Mechanical Transmission Clutch [J]. Transaction of the Chinese Society for Agricultural Machinery,2011,42(8):1-6.(in Chinese)
[6]任正云,邵惠鹤,张立群. 几种不稳定滞后对象的预测PID控制[J]. 控制与决策,2004,19(6):671-674.Ren Zhengyun,Shao Huihe,Zhang Liqun. Predictive PID Control for Several Kinds of Unstable Plus Time Delay Processes [J]. Control and Decision,2004,19(6):671-674. (in Chinese)
[7]吴振顺,姚建均,岳东海. 模糊自整定PID控制器的设计及其应用[J]. 哈尔滨工业大学学报, 2004, 36(11):1578-1580.Wu Zhenshun,Yao Jianjun,Yue Donghai. A Self-Tuning Fuzzy PID Controller and Its Application [J]. Journal of Harbin Institute of Technology,2004,36(11):1578-1580. (in Chinese)
