新能源汽车散热风扇驱动系统仿真研究
2013-10-25张程,金涛
张 程, 金 涛
(1.福州大学电气工程与自动化学院,福建 福州 350108;2.福建工程学院电子信息与电气工程系,福建 福州 350108)
0 引 言
蓄电池是新能源汽车的核心部件,直接影响着汽车的使用性能和续驶行程等。要保证新能源汽车可靠安全的行驶,必须采取有效的散热措施对电池进行强制散热以保证其动力电池的可靠安全工作[1]。本文研究的电池散热风扇属于离心式风机,以外转子式的三相永磁同步电机作为驱动电机。永磁同步电机(PMSM)具有体积小、重量轻、能量转换效率高、运行可靠性高、调速范围广等优点,已经逐步取代直流伺服电动机而用于高性能的交流伺服系统中[2];因此,建立永磁同步电机控制系统的仿真模型对验证各种控制算法、优化整个控制系统具有十分重要的意义[3]。这里在分析PMSM数学模型的基础上,借助于Matlab/Simulink强大的仿真建模能力,在Simulink中建立PMSM控制系统的仿真模型,通过对实例电机的仿真,给出了各种仿真波形,为实际新能源汽车蓄电池的可靠散热控制系统的设计和调试提供了有效的途径。
1 PMSM的数学模型
永磁同步电机在忽略铁心饱和与电机绕组漏感,并且假设气隙中磁势呈正弦分布,同时又忽略磁场高次谐波的情况下,运用坐标变换理论,可以得到在同步旋转d-q坐标系下的数学模型,通常由电压方程、定子磁链方程、电磁转矩方程、机械运动方程组成,具体有:

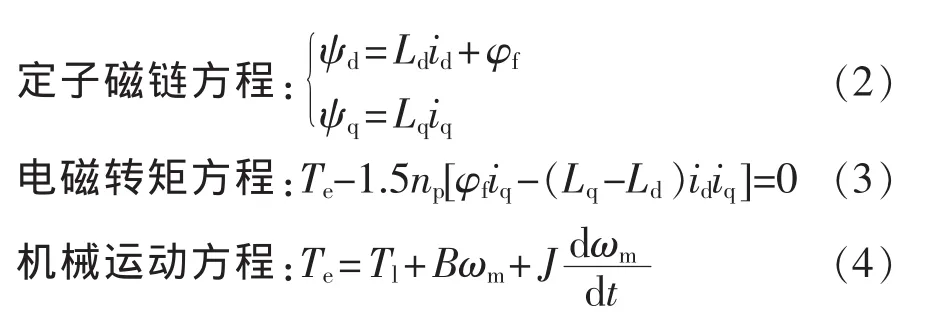
式中:ud、uq——定子电压d、q轴分量;
id、iq——定子电流d、q轴分量;
ψd、ψq——定子磁链d、q轴分量;
Ld、Lq——定子绕组d、q轴电感;
Rs——绕组电阻;
ωr——转子永磁体产生的磁链;
Te——电机电磁转矩;
Tl——负载转矩;
J——电机转动惯量;
p——电机转子极对数;
ωm——机械转子角速度;
B——阻尼系数。
2 散热风扇控制系统方案设计
系统使用转速-电流双闭环控制方案[4],考虑到PMSM进行变频调速时的强耦合、时变、非线性等特点,在内环对永磁同步电机进行空间矢量脉宽调制(SVPWM)控制,为了增强系统的鲁棒性及抗干扰能力,在外环采用速度PI控制器。系统原理框图如图1所示,主要由坐标变换、SVPWM、三相逆变器、PI控制器等模块组成。
3 散热风扇控制系统的模型建立及分析
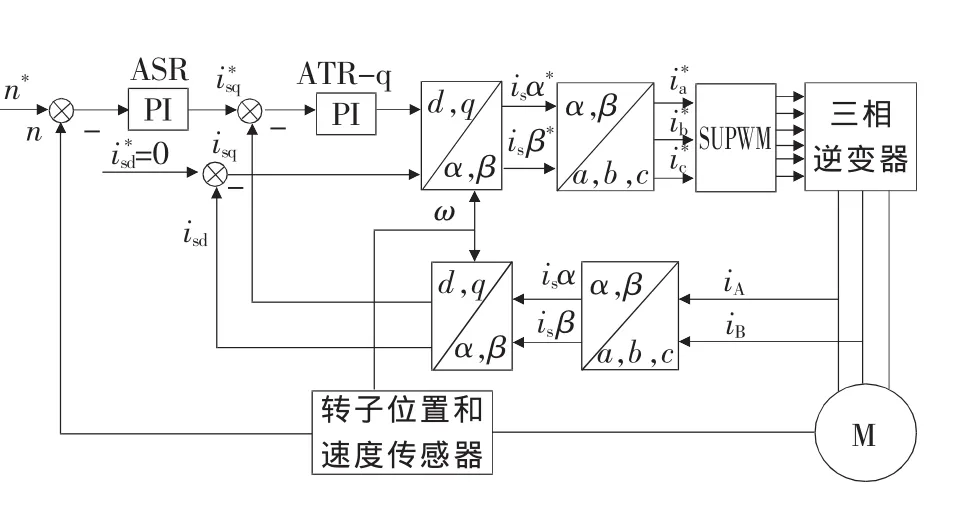
图1 系统原理框图
根据模块化建模的思想,将永磁同步电机的散热风扇控制系统分为若干个功能不同且独立的子模块,主要包括速度控制器模块、矢量控制模块、坐标变换模块、PWM发生器模块、PMSM本体模块等[5-6]。在Matlab的Simulink环境下,通过这些功能模块的有机组合,建立永磁同步电机矢量控制系统的仿真模型,实现双闭环控制。
根据永磁同步电机系统原理结构,在Matlab7.0的Simulink仿真环境下,利用SimPowerSystem里面丰富的模块库,在分析永磁同步电机数学模型的基础上,建立永磁同步电机控制系统的仿真模型,仿真模型框图如图2所示。
模型建好后,就可直接对它进行相应的仿真分析。选择合适的输入源模块做信号输入,用适当的接收模块(如示波器)观察系统响应,分析系统特性。点击菜单栏Simulation上的Start命令开始仿真,结果输出到接收模块上。还可以修改系统模块及参数,来修正不符合要求的仿真结果,继续进行仿真分析。
3.1 速度控制模块
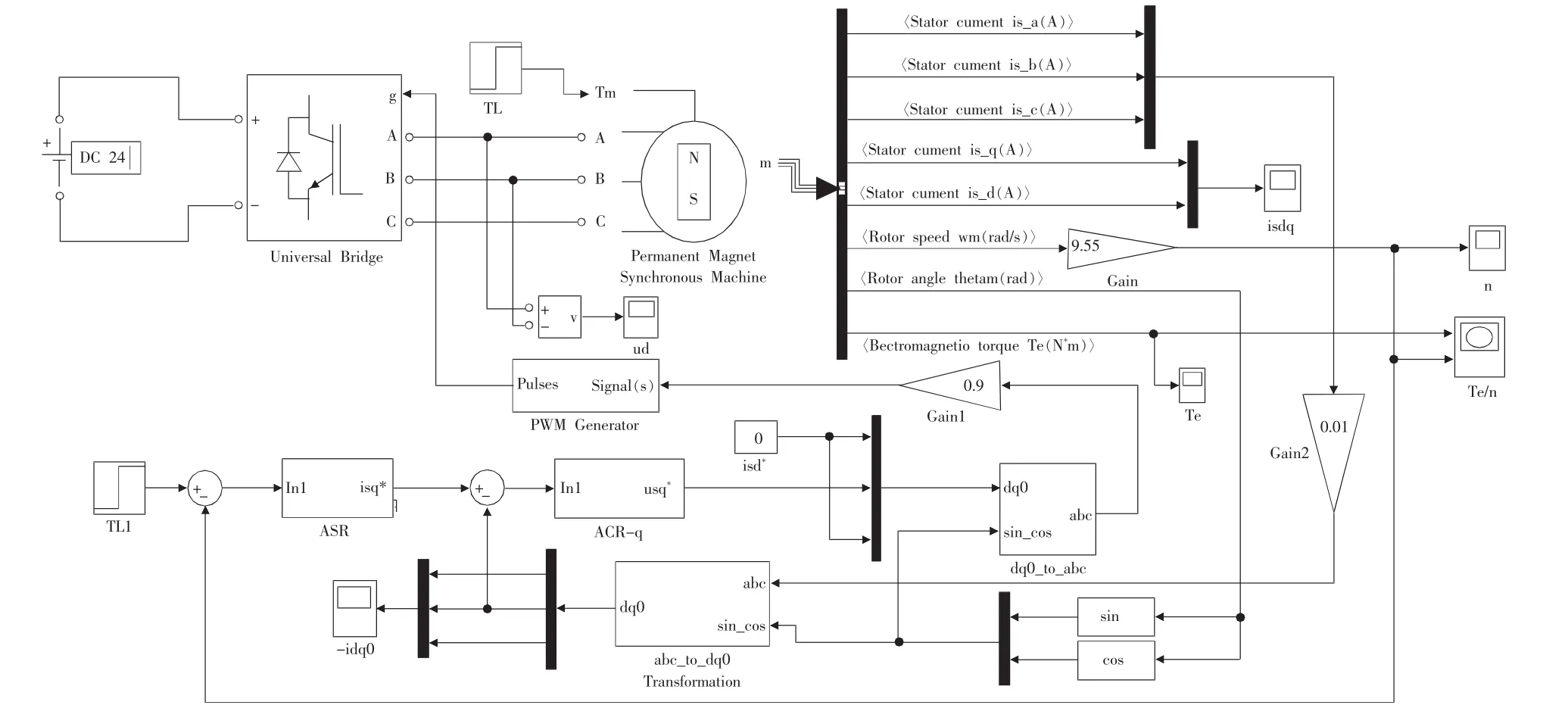
图2 散热风扇控制系统的PMSM仿真模型图
速度控制模块的结构框图如图3所示,可以看出速度控制模块的结构比较简单,由PI调节器和限幅输出模块组成。通过反复调整使Kp=11.7,Ki=140,让系统输出达到最佳状态。电流调节其实就是转矩调节模块,将转速调节器的输出电流作为转矩调节器的输入,其中Saturation饱和限幅模块的功能是将输出的三相参考相电流限定在要求的范围之内。电流调节模型图与转速调节模型图相同。
3.2 坐标变换模块
坐标变换模块的结构框图如图4所示。坐标变换模块实现的是d-q轴旋转坐标系下的两相电流向abc静止坐标系下的三相电流的等效变换,如式(5)所示。
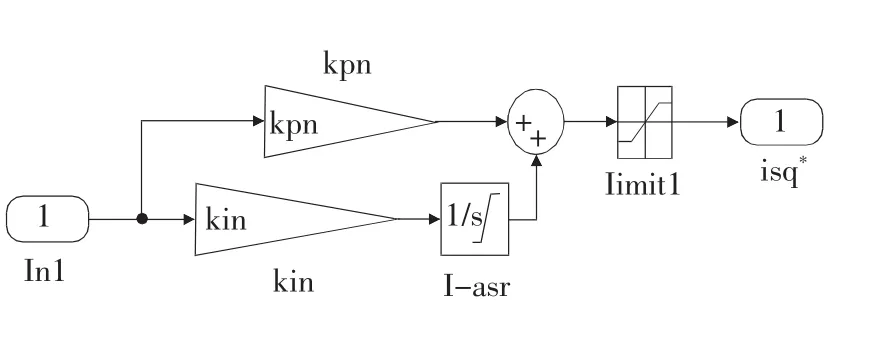
图3 转速控制模块结构框图
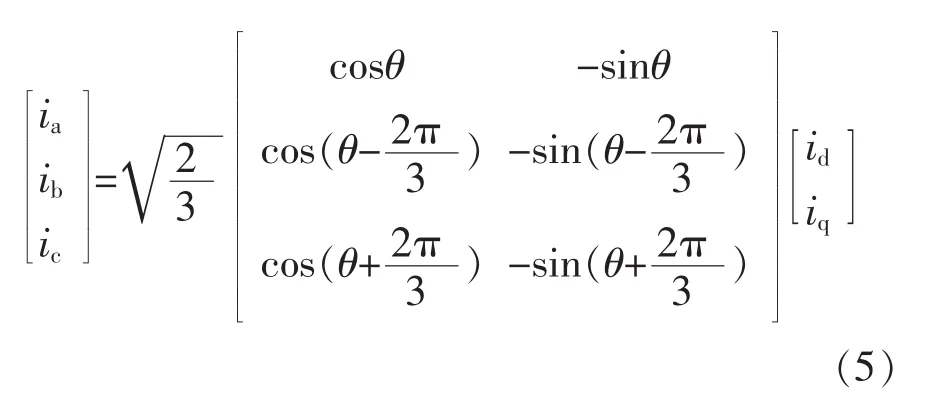
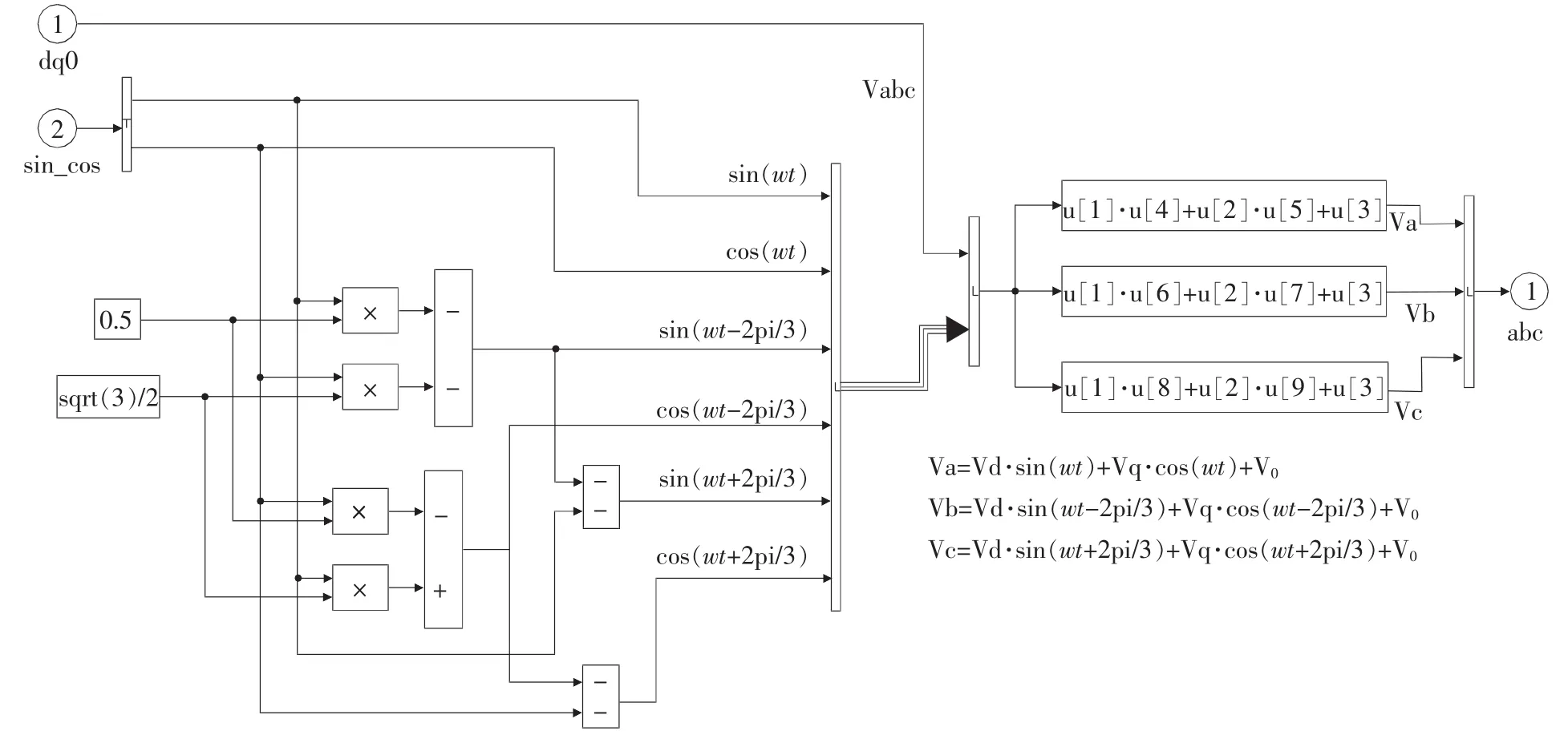
图4 坐标变换模块结构框图
3.3 PWM发生器模块
PWM发生器模块为逆变桥提供SVPWM (脉宽调制)触发信号,可以采用Matlab7.0的Simulink中的SimPowerSystem模块库中提供的通用逆变模块搭建。
4 系统的仿真及分析
根据图2所示的散热风扇控制系统的仿真电路图对系统进行仿真实验和性能分析,以验证其可行性和有效性。仿真参数的设置如下:逆变器直流电源电压为24 V,IGBT的开关频率设置为 15.2 kHz,负载转矩起始值为0.5N·m,在0.1s时降至0.2N·m,仿真时间 t=0.2s,当参考速度 speed(ref)=2000r/min 时,由示波器观测各参数波形图,仿真结果如图5所示。
永磁同步电机的参数[7]设置如表1所示。
从图5(a)中可以看出电机在启动后的0.02s内转速快速上升,并在经过0.01s的波动之后迅速达到稳定状态,系统响应较快且较平稳,实际转速能快速跟踪参考转速几乎无超调,电机动态响应性能良好。图 5(b)和图 5(c)中可以看出 0.03 s之前转矩和电流都出现很大的振荡,这是因为电机启动初期转子转速低于定子旋转磁场转速,定子磁链和永磁体磁链产生的转矩在较短的时间内起到制动作用。当牵引转矩小于制动转矩时,电机总转矩下降,从而出现振荡现象,此时转矩值为0.5 N·m,在0.1 s突降为0.2N·m的负载时,转矩和电流均有相应响应,但经过短暂的波动之后均达到稳定状态,电磁转矩能跟踪负载转矩,稳态时转矩和电流略有波动,但基本平稳。图5(d)为电机的机械特性曲线,可以看出机械特性较为理想。
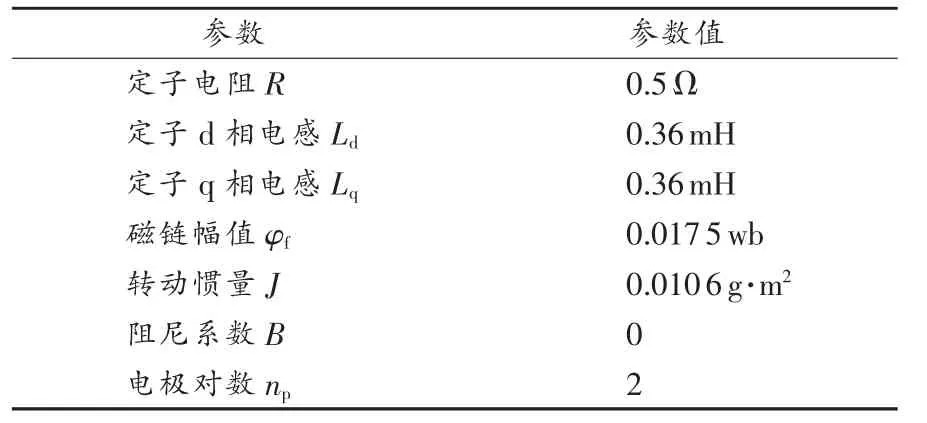
表1 PMSM参数表
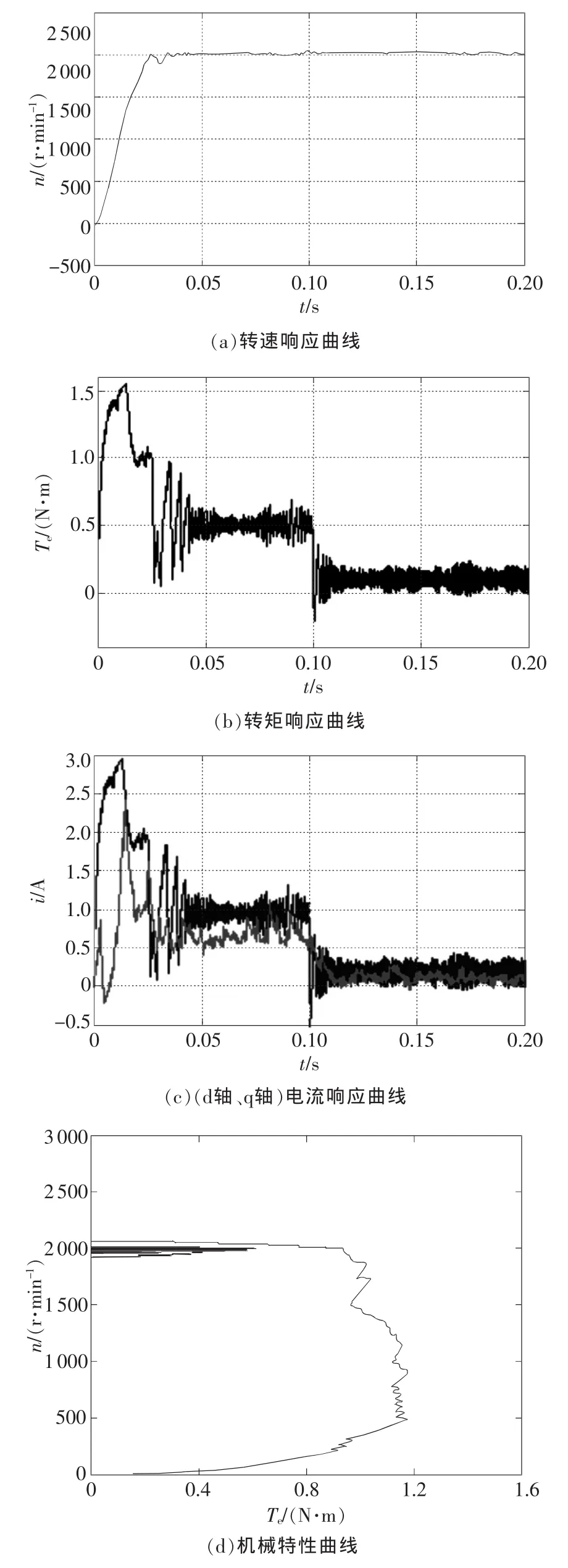
图5 散热风扇系统转速、转矩、电流及机械特性曲线
5 结束语
在分析永磁同步电机数学模型的基础之上,建立了电机的数学方程,通过数学的方法去研究永磁同步电机,并在Matlab/Simulink里搭建模型进行仿真。由电机仿真波形可以看出,系统具有调速范围较宽、动态响应好、稳态误差较小的特点[8-9],这与实际散热风扇的运行状态是一致的,系统起动后保持恒定转矩,突加扰动时系统波动较小,充分说明系统具有较好的鲁棒性,为新能源汽车散热风扇驱动系统的分析与设计提供了新颖的思路。
[1]王兆安,白继彬,牛新国,等.新能源汽车与电力电子技术[M].北京:机械工业出版社,2010(1):34-75.
[2]爱赛尼,倪光正.现代电动汽车、混合动力电动汽车和燃料电池车-基本原理、理论和设计[M].熊素铭译.北京:机械工业出版社,2010(10):150-180.
[3]吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社,2010(8):10-20.
[4]陈荣.永磁同步电机控制系统[M].北京:中国水利水电出版社,2009:30-39.
[5]何苗,刘政华.基于DSP的无传感器永磁同步电机控制器设计.维特电机[J].计算机仿真,2010,38(10):63-65.
[6]田晓强,易建军,陈昌明,等.基于DSP的冲压材料成型控制规律的研究[J].中国测试,2010,36(3):1-5.
[7]王春民,嵇艳鞠,栾卉,等.Matlab/Simulink永磁同步电机矢量控制系统仿真[J].吉林大学学报:信息科学版,2009,27(1):17-22.
[8]李学文,李学军.基于Simulink的永磁同步电机建模与仿真[J].河北大学学报:自然科学版,2007,27(SI):28-31.
[9]张亚军,杨盼盼.纯电动汽车再生制动系统的建模与仿真[J].武汉理工大学学报,2010,32(15):90-94,98.
