星图模拟方法在星敏感器技术研究中的应用
2013-10-10吴峰朱锡芳许清泉
吴峰,朱锡芳,许清泉
(1.常州工学院电子信息与电气工程学院,江苏 常州 213002;2.常州工学院光电工程学院,江苏 常州 213002)
0 引言
准确测量姿态是航天器顺利飞行的重要保障,星敏感器是目前精度最高的一种姿态测量仪器,其工作过程包括星空成像、星像提取、星图识别、姿态估算、最终输出姿态。光学系统设计、星像提取、导航星优选、导航星星库构建、星图识别、姿态估算等技术是星敏感器研究的关键。研究星敏感器技术,改善其性能,对提高星敏感器系统的设计质量和运行具有重要意义。
研究星敏感器技术,需要大量的星图来验证部分关键技术的可行性和性能,算法程序的开发、调试、性能评估以及地面试验[1]同样需要一定数量的星图。然而,所需星图未必都能通过实际拍摄得到,因此通过计算机程序设计获取模拟星图成为一个捷径。
在国内,哈尔滨工业大学从上世纪90年代开始就利用计算机模拟CCD拍摄的星空图片,开展软件调试和地面实验的研究。[2-3]2000年,中国科学院长春光学精密机械与物理研究所研制成功了星敏感器星像模拟软件,该软件具有模拟基本成像环境的功能,所得数字星图在星图识别算法研究中效果显著。[4]2009年,北京航空航天大学报道了利用光线追迹产生星空经过光学系统成像,获得模拟星图的研究情况。[5]
本文在分析星敏感器成像过程的基础上,给出了一种利用ZEMAX光学设计软件,通过扩展编程开展星图模拟的方法,建立星图模拟系统。与其他方法相比,该方法成本低、易于实现,设计得到的星图模拟系统能提供丰富多样的数据,操作简单,对全面评估星敏感器光学系统像质、研究星像提取、星图识别、导航星优选等算法以及星敏感器标定技术具有重要的指导意义。
1 基本原理
ZEMAX软件具有强大的设计和分析光学系统的功能,通过光线追迹,可确定物点经过已知光学系统后的成像,评估光学系统的成像质量。本文星图模拟的基本思路是:将光学系统视场内的恒星作为物面信息,利用ZEMAX软件光线追迹功能,获取像面信息,输出星图。由于星图模拟中物面信息的输入和星图输出无法由ZEMAX软件自动完成,因此必须利用其接口通过编程实现,建立外部程序,扩展该软件的功能。外部程序和ZEMAX软件之间建立通信链路,实现数据的相互交换。当外部程序存储到ZEMAX目录中时,可以被ZEMAX软件调用。星图模拟过程如图1所示。
第一,为获得当前光学系统视场内的观测星,预先根据星敏感器极限星等,对天文星表进行星过滤处理,建立观测星星库,星库保存观测星的星号、星等、赤经、赤纬等数据,并按赤纬值升序存储各观测星数据。

图1 模拟星图流程
第二,外部程序根据当前光轴在惯性坐标系中的指向(αc、δc),从观测星星库中提取视场内的观测星数据,计算观测星在本体坐标系中X和Y方向的入射角XFLD和YFLD,并将其作为物面信息传递给ZEMAX软件。
第三,ZEMAX软件通过光线追迹,完成成像,并把光线到达像面的位置坐标(x,y)以及能量f(x,y)传递给外部程序。
第四,外部程序计算星图中每个像元的灰度,输出数字星图。
1.1 观测星的提取和视场位置的计算
根据当前光轴指向确定视场中的观测星,此过程称为观测星的提取[6],实现步骤如下:
首先,对选定的光轴指向(αc、δc),挑选出观测星星库中坐标(α,δ)满足|δ-δc|≤wm的星,其中wm表示像面探测器对角线对应的视场角。
其次,为了进一步筛选,将这些挑选所得星的坐标从惯性坐标系转换到本体坐标系。设观测星S在惯性坐标系和本体坐标系中的方向余弦矢量分别为Vi和Vb,其中:
对光轴指向(αc、δc),可按一定方式旋转惯性坐标系得到本体坐标系。如图2所示,惯性坐标系先绕Z轴由+X轴向+Y轴旋转αc,得到X'Y'Z'坐标系,新坐标系再绕Y'轴由+Z'轴向+X'轴旋转90°- δc,得到 X″Y″Z″坐标系,该坐标系绕 Z″轴旋转φ,得到本体坐标系XbYbZb。
由此,观测星在本体坐标系中的方向余弦矢 量Vb为:

其中,φ由本体坐标系Xb、Yb轴的实际指向决定,当取Xb轴与经线相切、指向赤纬减小的方向,Yb与纬线相切、指向赤经增加的方向时,φ=0。

图2 惯性坐标系与本体坐标系的旋转关系
最后,计算它们的视场角,并确定当前观测星是否出现在视场中。将星敏感器光学系统视为理想光学系统,以物方和像方主面表示。为简化讨论,设本体坐标系XbYbZb建立在光学系统之上,如图3所示。其中,H和H'表示物方和像方主点,也是节点,XFLD和YFLD分别为观测星在Xb,Yb方向上的视场角,由图3得到:
如果光学系统在Xb,Yb方向上的最大视场角为wA和wB,只有满足:

此时,恒星才能被观测到。通过式(4)筛选得到当前视场中的观测星,同时也得到它们的视场角XFLD、YFLD。
1.2 观测星成像

图3 计算观测星在当前视场中的位置示意图
利用ZEMAX的光线追迹功能完成恒星成像。对当前视场中每颗观测星,在光谱范围内作光线追迹,得到它们经光学系统的成像。每束光线代表了一份能量,光线应均匀分布,将入瞳按正方形网格划分,选取经过入瞳中心和入瞳内网格点的光线参与成像。
经过光线追迹,光线到达像面的位置坐标为(x,y)。星敏感器的探测器以像元为基本单元,像面经过采样而离散[7],由(x,y)确定光线所达到的探测器像元。
1.3 模拟星图的输出
为存储每个像元的星像数据,需定义一个与探测器尺寸相匹配的矩阵变量,矩阵的每个元素分别存储对应像元的星像信息。然而,由于星像区域只占像面的一小部分,星图的大部分区域是暗的,该矩阵的大部分元素数据值为0,且计算过程中并未用到,因此使用三元组结构稀疏矩阵存储星图数据,以节约内存。三元组结构定义如下:

其中,row、col、value分别记录矩阵中非0元素的行号、列号、数值。整个星图存储到式(6)定义的结构中。

其中,MAXSIZE为一个预定义的常数,星像像元数最多不超过MAXSIZE,data记录每个星像像元的位置和灰度,m、n为星图的总行数和总列数,t为星像总像元数。
稀疏矩阵starmap按照BMP位图格式输出。每个像元的灰度取值范围为0~255,即8位。设定当前星图中最亮像元的灰度值为255,其他像元按其灰度与最亮像元灰度的比值规化处理。
2 星图模拟方法在星敏感器研究中的应用
通过扩展编程,建立星图模拟系统,输出界面如图4所示,其中图4(a)为星图显示窗口,给出星图模拟结果,图4(b)为文本窗口,显示观测星和星像数据,修改外部程序代码,可根据需要输出数据。本文给出的星图模拟方法在星敏感器技术研究中有以下方面的应用。

图4 星图模拟系统的输出界面
2.1 评估光学系统像差对姿态测量精度的影响
星敏感器光学系统总存在像差,其中影响姿态测量精度的主要是畸变和倍率色差,它们使主光线与像面的交点偏离理想位置。设理想星像在本体坐标系中的坐标为(x0,y0,-f),实际求得的星像质心在本体坐标系中的坐标为(xb,yb,-f),定义这两位置相对于像方主点H'的夹角为星像质心偏移角,即:

该值表征了光学系统对姿态测量误差的影响。通过星图模拟,计算各个视场星像的x0,y0和xb,yb,从而计算出质心偏移角,还可以计算当像面位置移动以及温度变化时质心偏移角变化情况。[8]星图模拟程序能用于定量地评价光学系统像差、安装误差、温度变化对测姿精度的影响。
2.2 评估星像提取精度及其对星图识别的影响
光学系统对星空的成像经过探测器采样,成为数字星图。即使观测星理想成像,星像能量分布在采样前后也会发生变化,引起星像提取得到的星像位置存在一定误差。星图模拟程序能提供观测星理想像的质心坐标,并以文本方式输出数据。而利用星像提取算法处理对应星图[9],能得到星像坐标的计算值。
当在ZEMAX中设置光学系统为理想系统时,运用本文星图模拟方法,修改外部程序代码,开发用于产生随机视轴指向模拟星图的蒙特卡罗模拟程序,并以BMP文件输出大量随机指向模拟星图,同时提供观测星数据。按上述方法处理星图,得到观测星位置的理想值和计算值,两者之差的RMS值即可作为星像提取的精度,即:

其中,n表示总星数,第i个星像的位置理想坐标和测量坐标为(xi0,yi0)、(xib,yib)。
同时,每幅星图经过星像提取处理后,将计算所得的星像位置坐标输给星图识别和姿态估算程序,统计星图识别成功率和姿态精度,从而考察星像提取算法对星图识别的影响。
2.3 标定误差参数,提高测量精度
当ZEMAX中采用实际光学系统时,通过多项式拟合,建立星像质心坐标理想值和测量值之间的函数关系,对误差进行标定。[10]将实际测量值代入拟合公式,拟合值用于星图识别和姿态估算,减少探测器采样和星像提取误差对测量精度的影响。误差标定后,星像位置误差明显减小,如图7所示。
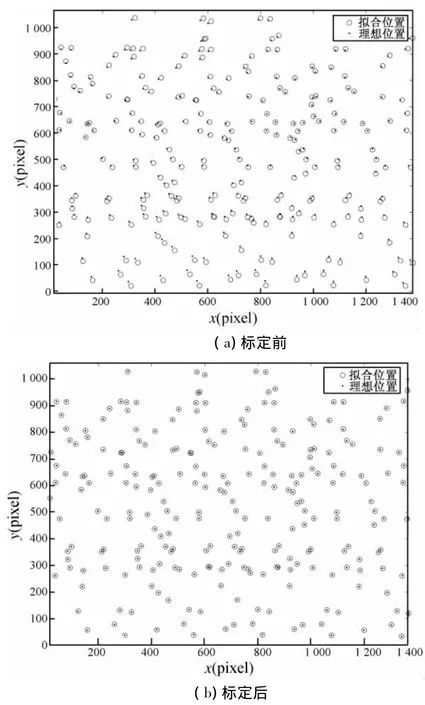
图5 标定前后星像位置与理想位置的偏离
2.4 星图模拟方法在导航星优选算法和星图识别算法研究中的应用
优选导航星和星图识别等算法的建立和程序设计难度大、过程繁杂。当需要查找程序出错原因时,星图模拟程序可输出指定极限星等、指定方位、指定视场大小天区中恒星的位置、星号、星等等信息,以一种特例的方式检查程序执行中的数据是否正确,有助于快速开展程序调试。
星像提取、星图识别和姿态估算程序处理这些模拟星图,输出测量姿态。通过统计星图识别成功率以及姿态误差,验证导航星优选算法和星图识别算法的有效性,星图模拟方法为评价算法性能提供了便利。
3 结语
星图模拟是一种为星敏感器研究提供星图数据的快捷途径,利用ZEMAX软件接口,通过扩展编程,设计星图模拟程序,获取数字星图。该方法简单易行,程序设计工作量小,计算复杂性低。星图模拟程序功能强大,可以提供理想星像位置和实际星像位置以定量评价光学系统像质,并根据这些数据标定星像提取误差,提高测姿精度。星图模拟方法为全面评价优选导航星算法和星图识别算法性能提供了充足的星图数据,降低了这些算法的程序调试难度,提高了程序调试速度。
注:本研究受江苏省高校“青蓝工程”资助。
[1]魏新国,张广军,樊巧云,等.利用仿真星图的星敏感器地面功能测试方法[J].红外与激光工程,2008,37(6):1087 -1091.
[2]张钧萍,林涛.一种模拟CCD星图的方法[J].中国空间科学技术,1999,19(3):46 -50.
[3]许世文,钟奉金,王均生.实时星图模拟器方案设想[J].航天器环境工程,1995(1):12-14.
[4]郝胜国,郝志航.星敏感器星像模拟软件的研究[J].光学精密工程,2000,8(3):208 -212.
[5]Yang Yande,Wang Jiangyun,Zhu Yutong.Highprecision Simulation of Star Map Using Forward Ray Tracing Method[C]//ICEMI'09.9th International Conference on Digital Object Identifier,[S.l].Proceedings of IEEE,2009:3541 -3544.
[6]饶才杰,房建成.一种星图模拟中观测星提取的方法[J].光学精密工程,2004,12(2):129 -135.
[7]李葆华,马衍宇,刘睿,等.适用于星敏感器的预测未知恒星星像质心算法[J].光学精密工程,2009,17(1):191 -195.
[8]吴峰,沈为民.采用扩展外部编程方法优化设计APS星敏感器光学系统[J].红外与激光工程,2010,39(3):506 -511.
[9]原玉磊,郑勇.一种大视场星图星点提取的阈值算法[J].海洋测绘,2011,31(5):41 -43.
[10]王安国,王华斌,唐君,等.基于星图自动辨识的光学系统精确标定方法[J].电子学报,2011,39(3):575 -578.
